




 文章探讨了低电容ESD二极管在高速通讯端口防护中的重要性,并推荐了国产替代型号DW03DLC-B-S作为LC3311CCW的替代品。DW03DLC-B-S具备更低的结电容、更强的浪涌电流承受能力,并在以太网、手机等领域广泛应用。
文章探讨了低电容ESD二极管在高速通讯端口防护中的重要性,并推荐了国产替代型号DW03DLC-B-S作为LC3311CCW的替代品。DW03DLC-B-S具备更低的结电容、更强的浪涌电流承受能力,并在以太网、手机等领域广泛应用。
LC3311CCW和DW03DLC-B-S,它们之间的共同点是:低电容ESD二极管,结电容低至1PF。低电容ESD二极管,高速通讯端口静电防护“神器”,封装多样,型号齐全。低电容ESD二极管的选型原则,首先,要满足产品的防护等级;其次,根据客户产品的应用端口、实际工作电压、封装、浪涌电流等参数来选择;最后,用于信号传输保护时,要注意信号的频率或传输速率。有经验的电子工程师会根据信号的频率或传输速率来选择ESD二极管的电容值,频率或速率越高,对ESD二极管的结电容就越低,太大的话,会干扰信号的传输甚至丢失。为此,低电容ESD二极管,在高频高速的通讯端口中无处不在。

近日发现,很多客户前来询ESD二极管LC3311CCW(品牌SEMTECH)的替代料号,LC3311CCW国产替代对应的料号是哪个?DOWO(东沃)品牌DW03DLC-B-S能否pin-to-pin替代LC3311CCW?东沃FAE工程师根据LC3311CCW产品说明手册,推荐使用国产替代物料:DW03DLC-B-S。有关ESD静电保护器件DW03DLC-B-S详细介绍,如下:
DW03DLC-B-S低电容ESD参数
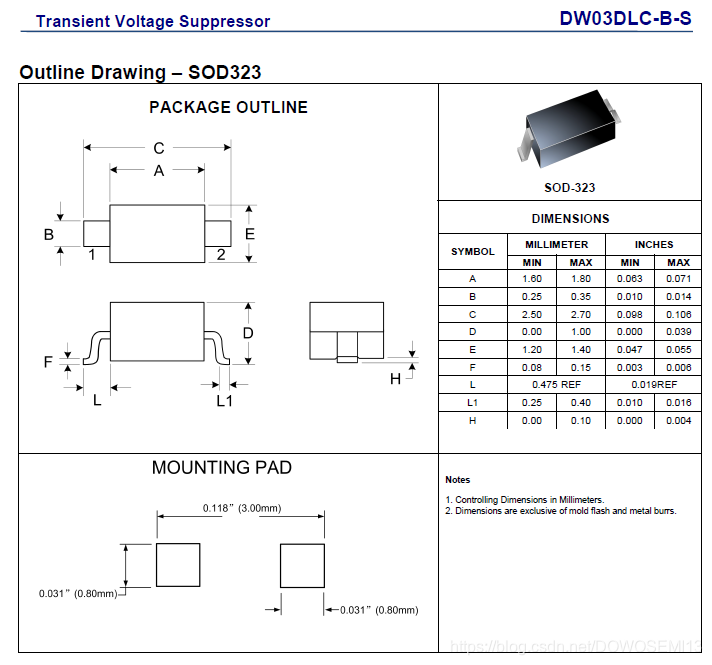
封装形式:SOD-323
峰值功率:350W
工作电压:3.3V
击穿电压:4.0V
钳位电压:7.0V
结电容值:1pF
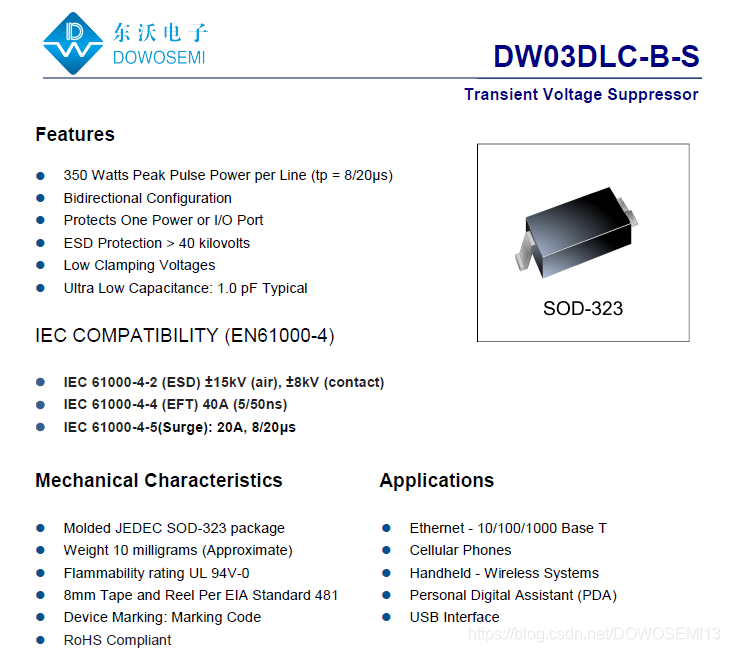
DW03DLC-B-S低电容ESD特性
双向、低钳位电压
保护一个电源或I/O端口
静电防护>4KV
通过无铅认证
阻燃等级UL 94V-0
IEC 61000-4-2 (ESD) ±15kV (air), ±8kV (contact)
IEC 61000-4-4 (EFT) 40A (5/50ns)
IEC 61000-4-5(Surge): 20A, 8/20μs
DW03DLC-B-S峰值脉冲功率350W,LC3311CCW峰值脉冲功率200W,DW03DLC-B-S能够承受更高的浪涌电流冲击能力。ESD二极管DW03DLC-B-S具有更好的供货周期,可快速支持样品、后续量产服务。同时,价格美丽,相比使用LC3311CCW,至少可以降低3%-12%的成本。在以太网、手机、PDA、无线系统、USB接口等领域都能看到低电容ESD二极管DW03DLC-B-S。

















 2476
2476

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









