



3.4Fisher线性判别:
思想:多维——Fisher变换——利于分类的一维;
方法:求解矢量w*-使其满足上述目标的投影轴的方向w和在一维空间中确定判别规则。
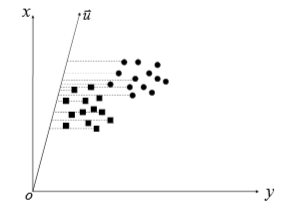
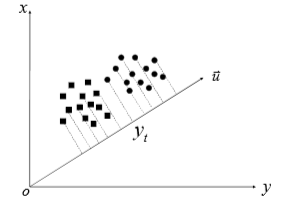
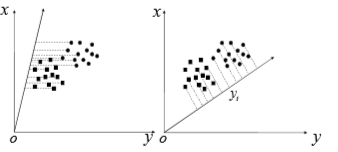
例如:二维模式向一维空间投影示意图:
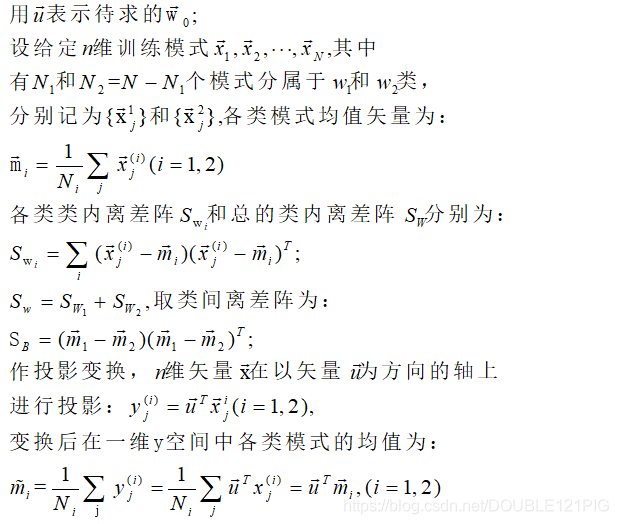
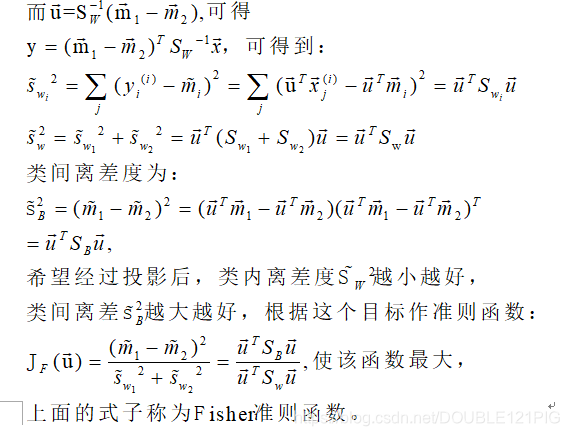
求解Fisher最佳鉴别矢量:
利用二次型关于矢量求导的公式可得:
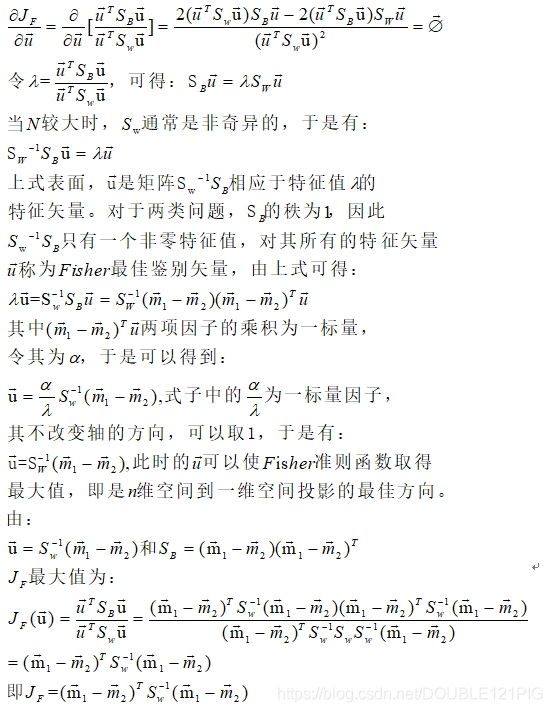
求解Fisher判别函数:
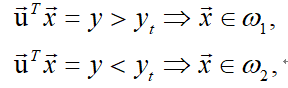
由于变换后的模式是一维的,因此判别界面实际上是各类模式所在轴上的一个点,所以可以根据训练模式确定一个阀值yt,于是Fisher判别规则为:
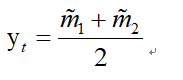
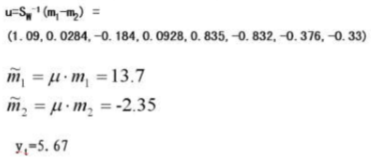
判别阀值可取两个类心在u方向上轴的投影连线的中点作为阀值,即:
FIsher方法实现步骤总结:

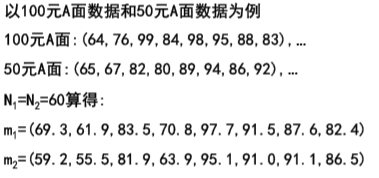
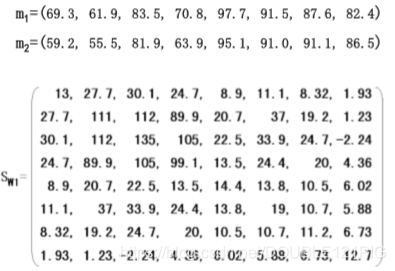
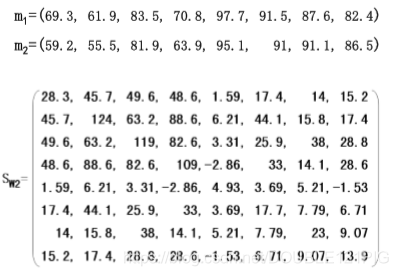
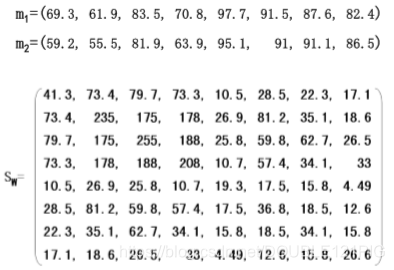
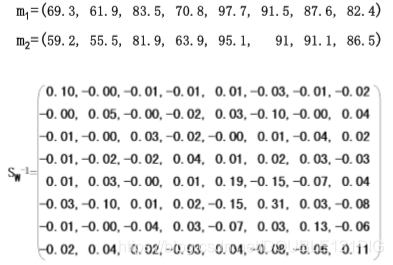
举例:
模式识别(八)Fisher线性判别
最新推荐文章于 2025-05-17 15:38:00 发布

















 1762
1762

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









