



 文章描述了在Windows10系统(版本1809)中,DJIMavicAir遥控器无法被模拟器和DJIAssistant2识别的问题。通过一系列步骤解决了驱动安装失败和识别不稳定的情况,包括以管理员权限安装驱动,更新系统,安装特定版本的DJIAssistant2,手动更新驱动,以及在必要时删除并重新安装DJIAssistant2。
文章描述了在Windows10系统(版本1809)中,DJIMavicAir遥控器无法被模拟器和DJIAssistant2识别的问题。通过一系列步骤解决了驱动安装失败和识别不稳定的情况,包括以管理员权限安装驱动,更新系统,安装特定版本的DJIAssistant2,手动更新驱动,以及在必要时删除并重新安装DJIAssistant2。
起因:
安装模拟器,键盘可以控制软件,但是开机状态的Mavic air遥控器却不能被模拟器识别,不能用摇杆控制飞机。
错误现象:
直接插上开机的遥控器,电脑设备驱动显示如下,并且一会识别得到,一会识别不到,一直在识别到和不到里反复弹跳。
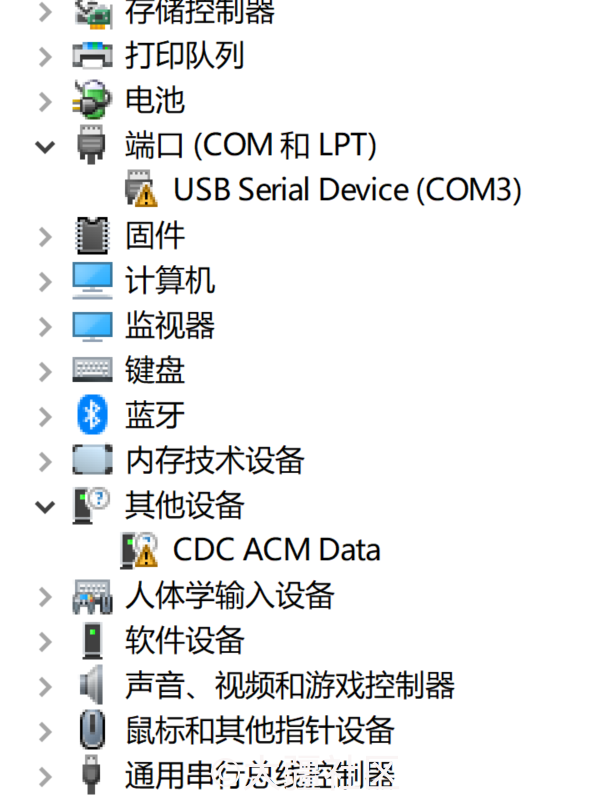
同时,安装DJI Assistant 2也识别不到开机的遥控器。
同时,安装模拟器文件夹DJI Flight Simulator下的文件dji_usb_5512_64_108.exe里面的3个驱动,也是全部失败。
出现错误时的电脑配置:
win10,版本1809(19年的系统)
惠普16年生产的机型,配置较高,不过是集成显卡。
解决方案:
第1步:在模拟器所在文件夹,找到dji_usb_5512_64_108.exe,管理员权限安装,如果三个都可以安装成功,则模拟器可以被成功识别。
部分安装成功和3个都安装不成功的看第二步:
第2步:更新win10到最新系统(非必须操作,如果下面的步骤都不管用,考虑从此步开始重新来一遍)
第3步:安装自己遥控器对应适配的DJI Assistant 2,请到官网去找,air1和air2不是同一个版本,air1是老版本,下载的安装程序的名字为:DJI+Assistant+2+1.2.5.exe
第4步:对弹黄色感叹号的CDC ACM Data——属性——安装驱动更新——本机内选择更新——你安装DJI Assistant 2的路径\DJI+Assistant+2+1.2.5\Drivers_all——选择在Drivers_all文件夹里进行驱动选择。

安装完后,CDC的感叹号报错会消失,电脑会新增一个DJI USB Virtual COM Dr的驱动。同时还会有一个串口识别错误的感叹号。在设置——设备里查看,发现叫C2驱动程序错误(就是遥控器不能被识别)
第5步:删除这个有错误的串口识别。注意删除后,无论计算机还是遥控器,重启后,电脑都没有再自动安装相关驱动。如有担心,此步可以跳过,继续下一步操作,实在解决不了再执行此操作。
第6步:卸载DJI Assistant 2,重新安装该版本。如有必要,重启电脑及遥控器。重新安装后,DJI Assistant 2即可识别出遥控器!
至此结束。
但是还有一点要说的,当DJI Assistant 2可以成功识别遥控器的时候,模拟器应该就可以识别遥控器了,此时不比再纠结与dji_usb_5512_64_108.exe的安装是否成功。我在执行完上面前6步的操作之后,dji_usb_5512_64_108.exe执行仍然是3个都失败,但是没关系,模拟器可以识别了。

















 4091
4091

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









