



 为解决企业邮件投递成功率低、黑名单拒收等问题,Coremail论客提供专业电子邮件+投递系统混合云方案,实现高成功率、易操作、可查询、可管理的邮件投递服务。
为解决企业邮件投递成功率低、黑名单拒收等问题,Coremail论客提供专业电子邮件+投递系统混合云方案,实现高成功率、易操作、可查询、可管理的邮件投递服务。
随着邮件系统从传统走向自主可控步伐的加快,企业对新型邮件系统中客户营销、账单投递、电子回单、电子发票等新场景应用有了更高的期待。电子邮件投递服务因其成本低、投递速度快、精确度高和个性化易操作等优势,已成为市场应用服务新需求。
在应用场景调查中,小编了解到:由于某TOP20证券公司业务的特殊需求,企业每天需要通过电子邮件的方式向客户发送大量邮件。但是受IP、带宽资源及运营商、反垃圾邮件等因素限制,普通的邮件投递成功率低,并且经常被网站列入黑名单拒收邮件,企业也无法针对用户行为进行分析。那么,针对这一难题,究竟有什么办法可以解决呢?
在了解到企业邮件的具体需求之后,Coremail论客根据证券行业特定的业务场景及投递处理应用的不同策略,为其定制了专业电子邮件+Coremail DS投递系统的混合云方案。在先进的投递系统引擎与友好的WEB远程界面上,实现了邮件投递的综合控制管理,增设个性化组信体验,直观用户反馈分析,产品定制开发等多项投递需求功能,为客户构建稳定和实用的投递系统,提供了海量、高成功率的专业邮件投递服务。
在业务场景分析上,Coremail论客针对证券行业中账单投递、消费通知、产品宣传、财经报表、理财信息、期刊订阅等提出了业务分类管理、黑名单、退信智能分析等多项解决策略。
投递简单易操作
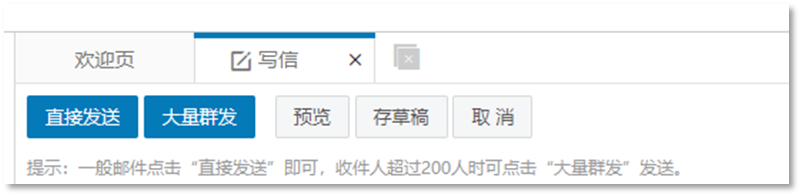
为了便于用户能够更加简单方便地使用投递系统,Coremail DS在WebMail 写信页面,增加了一个“大量群发”按钮,员工发送大批量邮件时点击该按钮,后台自动调用群发投递系统。
在使用中,当系统自动检测收件人超过200人时,后台自动调用邮件群发投递系统;通过Coremail邮件客户端提交投递任务时,系统对客户端本身不做任何改造,所有通过客户端过来的邮件任务,将对邮件收件地址的数量进行判定,当检测超过200人时,后台自动调用邮件群发投递系统。
投递结果可查询
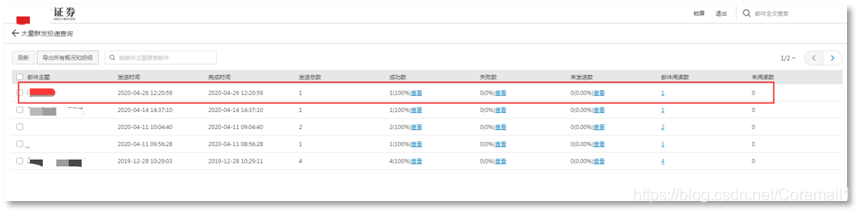
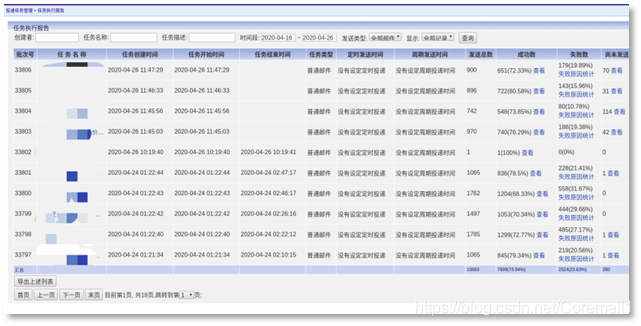
对于投递结果分析方面,用户可以通过办公邮件 Webmail 的自助查询-大量群发投递功能进行查询,并对本人投递任务结果进行查看导出。
此功能从8个维度对投递任务进行统计分析:发送情况总览、成功数分布、失败数列表及失败原因分布、域名、退订原因分布等。展示历史投递任务列表中,可对任务以成功率、失败率、打开率、退订率、无效率等进行排序,让所有投递结果清晰显示,方便用户了解投递情况。
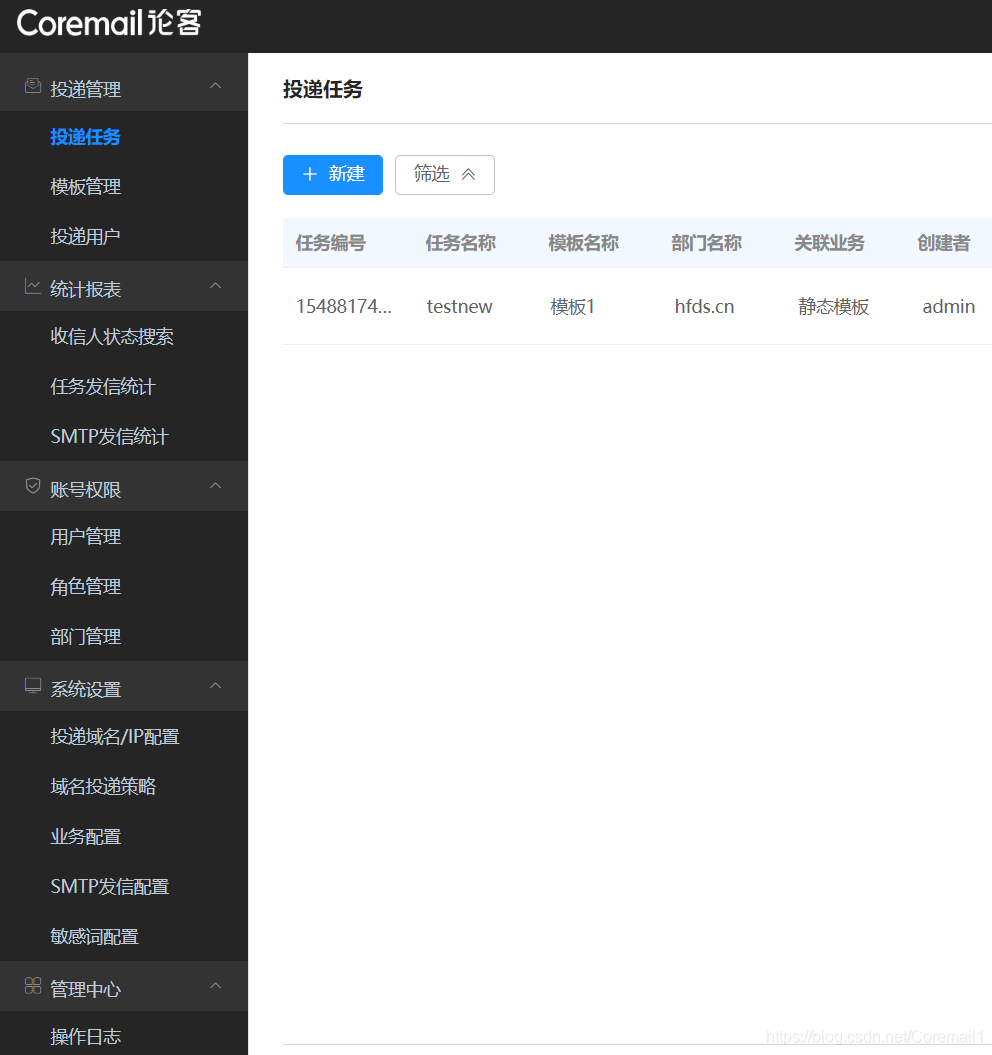
投递任务可管理
在对投递任务的管理中,企业可统一管理待投递、草稿和正在投递中的任务情况,列出已完成投递任务的执行情况,如:成功数/发送总数。并且支持多种任务操作管理:支持对发信中任务进行取消操作,对发信中任务进行暂停操作,对暂停中任务进行重启操作,对投递失败的邮件地址进行重投操作等,让投递任务变得可管可控。
高效投递,提高邮件到达率
在解决邮件投递的到达率问题上,Coremail结合多种先进技术,帮助企业加速邮件高效稳定到达。
- 提供多域名/IP、多服务器阵列的投递部署方案,让整个海量投递工作稳健进行
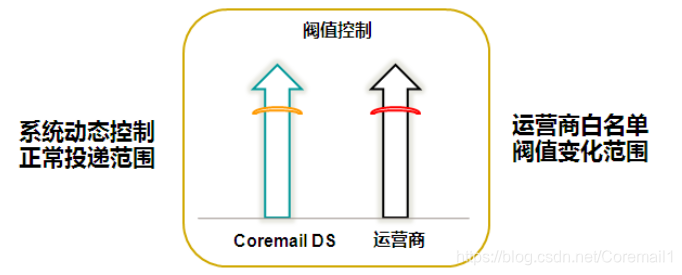
- 每个IP采用独立阈值控制,以符合目标服务器阈值的要求,最大程度地提升了投递效率
- 采用了先进的智能DNS解析技术,充分利用目标服务器的限制情况,同时发送邮件给收信站点的多台服务器
Coremail DS 投递系统融合多年专业、领先、卓越的邮件系统研发技术能力,并结合了大量客户的合作部署经验,通过多年的不断完善更新,只为给客户带来能够创造价值,提升企业效益的投递系统。

















 2387
2387

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









