



[NOIP2002 普及组] 过河卒
题目描述
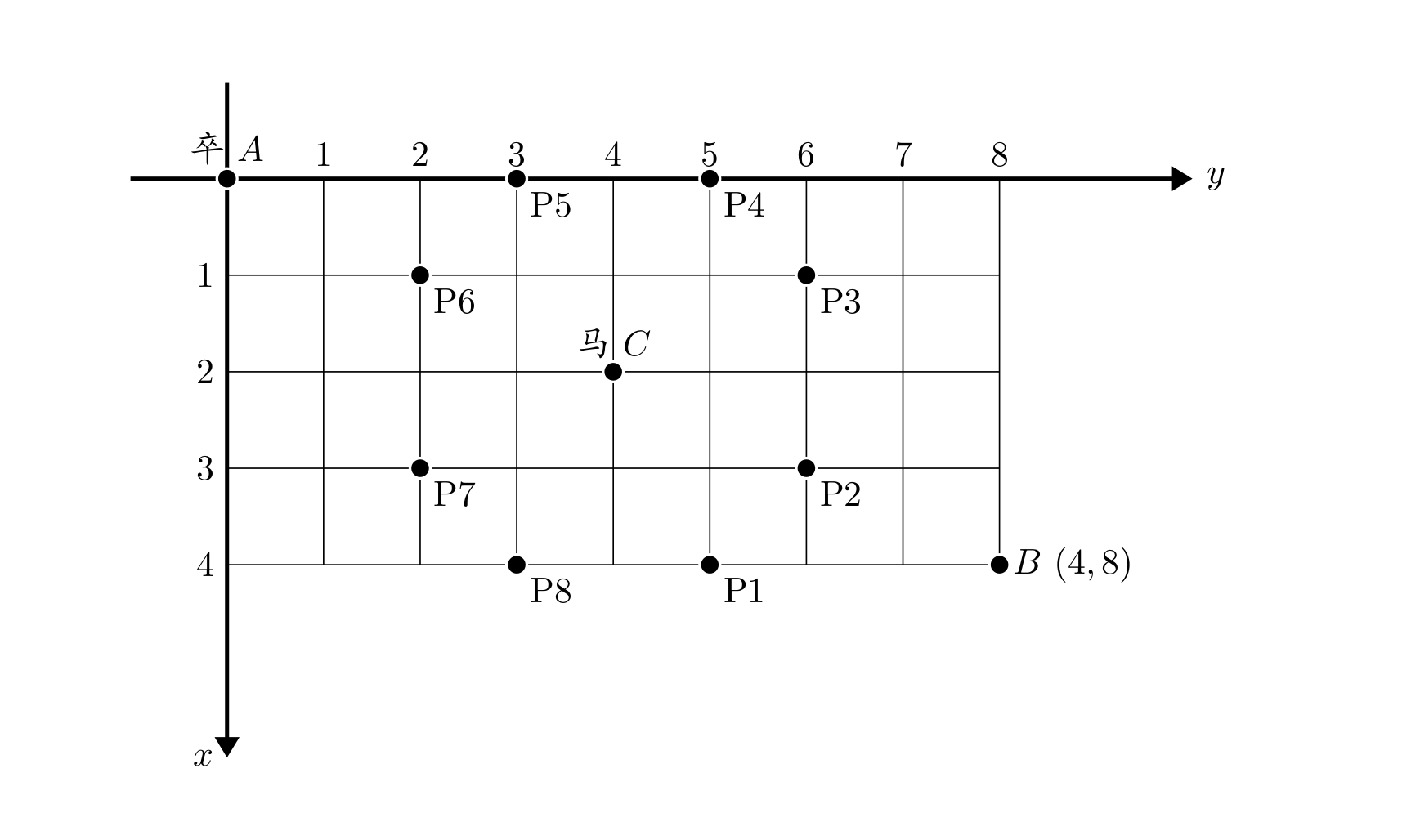
棋盘上 AAA 点有一个过河卒,需要走到目标 BBB 点。卒行走的规则:可以向下、或者向右。同时在棋盘上 CCC 点有一个对方的马,该马所在的点和所有跳跃一步可达的点称为对方马的控制点。因此称之为“马拦过河卒”。
棋盘用坐标表示,AAA 点 (0,0)(0, 0)(0,0)、BBB 点 (n,m)(n, m)(n,m),同样马的位置坐标是需要给出的。
现在要求你计算出卒从 AAA 点能够到达 BBB 点的路径的条数,假设马的位置是固定不动的,并不是卒走一步马走一步。
输入格式
一行四个正整数,分别表示 BBB 点坐标和马的坐标。
输出格式
一个整数,表示所有的路径条数。
分析
显然,这道题可以使用动态规划解决,卒的移动是一个多阶段问题,只要每一次移动都不会被马吃掉,那么这条路径就是可行的
解决动态规划问题使用了递推的思想,当前的状态可以用之前的状态推出
首先我们要使用一个dp数组作为递推数组
第一步:确定递推数组的含义
由于棋子在棋盘上的移动是二维的,我们用一个二维数组dp[][]来存储结果
dp[i][j]就表示卒从(0, 0)点移动到(i, j)点所有路径的条数
第二步:找出数组元素之间的递推关系式
依题意,卒每次只能向下或向右移动一个单位长度,当前棋子坐标为(i, j)时,棋子只可能从(i - 1, j)向下移动一格来到(i, j),或者从(i, j - 1)向右移动一格来到(i, j)
因此我们可以得到递推公式:
dp[i][j] = dp[i - 1][j] + dp[i][j - 1]
第三步:找出初始值或边界条件
如果在上边界上,那么当前位置只能是从前一个位置向右移动得到的;同理,如果在左边界上,那么当前位置只能是从上一个位置向下移动得到的
则有如下递推关系:
dp[0][j] = dp[0][j - 1] //上边界
dp[i][0] = dp[i - 1][0] // 左边界
同时,我们考虑在起点(0, 0)的情况,显然,从起点到起点只有一条路径
即dp[0][0] = 1
结合刚刚推出的这三个式子,可以发现:
dp[0][j] = dp[0][j - 1] = dp[0][0] = 1
dp[i][0] = dp[i - 1][0] = dp[0][0] = 1
到这里,递推关系已经差不多完成了,但是还有一个重要的因素马还没考虑
根据马走日的规则,马的周围有八个点都是不安全的,如图

相对于马的位置,我们把这八个点分别用8个坐标表示,即:
(1, 2) (2, 1) (-1, 2) (-2, 1) (-1, -2) (-2, -1) (1, -2) (2, -1)
将其用二维数组存储即可
最终代码
#include <iostream>
using namespace std;
long long dp[50][50];//总条数可能很多,用long long
//用二维数组存储马的控制点
int d[8][2] = {{1, 2}, {2, 1}, {-1, 2}, {-2, 1}, {-1, -2}, {-2, -1}, {1, -2}, {2, -1}};
int main(){
int n, m, horsex, horsey;
cin >> n >> m >> horsex >> horsey;
bool safe; //用来储存当前点的状态:安全/不安全
dp[0][0] = 1;//初始化
//二重循环遍历棋盘
for (int i = 0; i <= n; i++) {
for (int j = 0; j <= m; j++) {
safe = true;
if (i == 0 && j == 0) continue;//跳过起点
if (i == horsex && j == horsey) continue;//跳过马所在的点
for (int p = 0; p < 8; p++) {
//如果会被马控制,就不安全(只要在马的其中八个控制点中的其中一个)
if (i + d[p][0] == horsex && j + d[p][1] == horsey) {
safe = false;
break;
}
}
if (safe) {
//上边界
if (i <= 0) {
dp[i][j] = dp[i][j - 1];
}
//左边界
else if (j <= 0) {
dp[i][j] = dp[i - 1][j];
}
else {
dp[i][j] = dp[i][j - 1] + dp[i - 1][j];
}
}
}
}
//输出结果:到达(n, m)点的路径总条数
cout << dp[n][m] << endl;
return 0;
}
以上是这道题的全部内容,如有错误,欢迎指出

















 1510
1510




 到【灌水乐园】发言
到【灌水乐园】发言







