



一、哈希表
1. 哈希算法:
将数据通过哈希算法映射成一个键值,存取都在同一位置实现数据的高效存储和查找,将时间复杂度尽可能降低至O(1)
2. 哈希碰撞:
多个数据通过哈希算法得到的键值相同,称为产生哈希碰撞
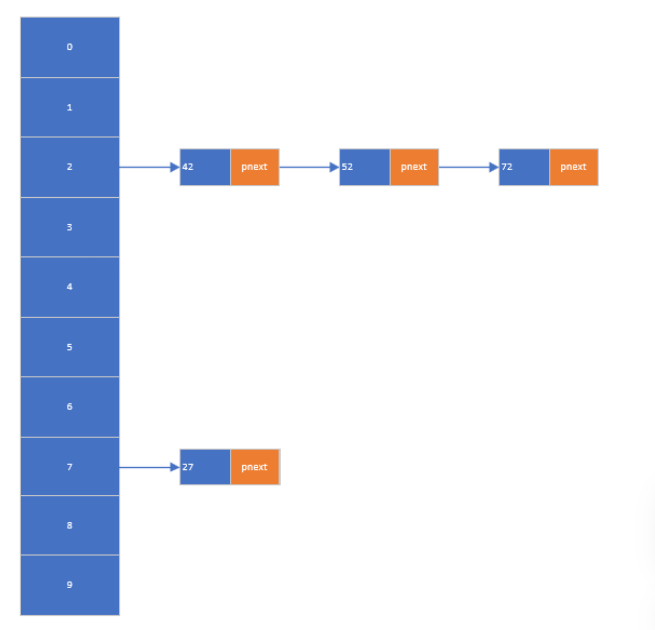
3. 哈希表:
构建哈希表存放0-100之间的数据
哈希算法选择:将0 - 100之间的数据的个位作为键值
4. 哈希表的实现
(1)哈希表插入
int insert_hashtable(int tmpdata)
{
int key = 0;
linknode **pptmpnode = NULL;
linknode *pnewnode = NULL;
key = tmpdata % INDEX;
for (pptmpnode = &phashtable[key]; *pptmpnode != NULL &&(*pptmpnode)->data < tmpdata; pptmpnode = &(*pptmpnode)->pnext)
{
}
pnewnode = malloc(sizeof(linknode));
if (NULL == pnewnode)
{
perror("fail to malloc");
return -1;
}
pnewnode->data = tmpdata;
pnewnode->pnext = *pptmpnode;
*pptmpnode = pnewnode;
return 0;
}
(2)哈希表遍历
int show_hashtable(void)
{
int i = 0;
linknode *ptmpnode = NULL;
for (i = 0; i < INDEX; i++)
{
printf("%d:", i);
ptmpnode = phashtable[i];
while (ptmpnode != NULL)
{
printf("%2d ", ptmpnode->data);
ptmpnode = ptmpnode->pnext;
}
printf("\n");
}
return 0;
}
(3)元素查找
linknode *find_hashtable(int tmpdata)
{
int key = 0;
linknode *ptmpnode = NULL;
key = tmpdata % INDEX;
ptmpnode = phashtable[key];
while (ptmpnode != NULL && ptmpnode->data <= tmpdata)
{
if (ptmpnode->data == tmpdata)
{
return ptmpnode;
}
ptmpnode = ptmpnode->pnext;
}
return NULL;
}
(4)哈希表销毁
int destroy_hashtable(void)
{
int i = 0;
linknode *ptmpnode = NULL;
linknode *pfreenode = NULL;
for(i = 0; i < INDEX; i++)
{
ptmpnode = phashtable[i];
pfreenode = phashtable[i];
while (ptmpnode != NULL)
{
ptmpnode = ptmpnode->pnext;
free(pfreenode);
pfreenode = ptmpnode;
}
phashtable[i] = NULL;
}
return 0;
}
二、排序和查找算法
1. 冒泡排序
时间复杂度为O(n^2)
稳定的排序算法
排序方法:相邻的两个元素比较,大的向后走,小的向前走,循环找len-1个大的值
int bubble_sort(int *parray, int len)
{
int i = 0;
int j = 0;
int tmp = 0;
for (j = 0; j < len-1; j++)
{
for (i = 0; i < len-1-j; i++)
{
if (parray[i] > parray[i+1]
{
tmp = parray[i];
parray[i] = parray[i+1];
parray[i+1] = tmp;
}
}
}
return 0;
}
2.选择排序
时间复杂度O(n^2)
不稳定排序算法
排序方法:从前到后找最小值与前面的元素交换,找到len-1个最小值,最后一个最大值即排序完成
int select_sort(int *parray, int len)
{
int i = 0;
int j = 0;
int tmp = 0;
int min = 0;
for (j = 0; j < len-1; j++)
{
min = j;
for (i = j+1; i < len; i++)
{
if (parray[i] < parray[min])
{
min = i;
}
}
if (min != j)
{
tmp = parray[min];
parray[min] = parray[j];
parray[j] = tmp;
}
}
return 0;
}
int insert_sort(int *parray, int len)
{
int tmp = 0;
int i = 0;
int j = 0;
for (j = 1; j < len; j++)
{
tmp = parray[j];
for (i = j; i > 0 && tmp < parray[i-1]; i--)
{
parray[i] = parray[i-1];
}
parray[i] = tmp;
}
return 0;
3. 插入排序
时间复杂度O(n^2) ,如果素组有序时间复杂度降低至O(n)
稳定的排序算法
排序方法:
将数组中的每个元素插入到有序数列中
先将要插入的元素取出
依次和前面元素比较,比元素大的向后走,直到前一个元素比要插入的元素小,或者到
达有序数列开头停止
插入元素即可
int insert_sort(int *parry, int len)
{
int tmp = 0;
int i = 0;
int j = 0;
for(j = 1; j < len; j++)
{
tmp = parry[j];
for(i = j; i > 0 && parry[i-1] > tmp; i--)
{
parry[i] = parry[i-1];
}
parry[i] = tmp;
}
return 0;
}
int output_array(int *parray, int len)
{
int i = 0;
for(i = 0; i < len; i++)
{
printf("%d ", parray[i]);
}
printf("\n");
return 0;
}
4.希尔排序
时间复杂度O(nlogn)
不稳定的排序算法
通过选择不同的步长,将数组拆分成若干个小的数组实现插入排序
若干个小的数组称为有序数列后,使得数组中的数据大致有序
最后再对整体完成一个插入排序
int shell_sort(int *parray, int len)
{
int step = 0;
int j = 0;
int i = 0;
int tmp = 0;
for (step = len/2; step > 0; step /= 2)
{
for (j = step; j < len; j++)
{
tmp = parray[j];
for (i = j; i >= step && tmp < parray[i-step]; i -= step)
{
parray[i] = parray[i-step];
}
parray[i] = tmp;
}
}
return 0;
}
5.快速排序
时间复杂度为O(nlogn)
不稳定的排序算法
选择左边的作为键值,从后面找一个比键值小的放前面,从前面找一个比键值大的放后面,键
值放中间
左右两边有元素则递归调用快速排序
int quick_sort(int *parray, int low, int high)
{
int key = 0;
int j = 0;
int i = 0;
key = parray[low];
j = high;
i = low;
while (i < j)
{
while (i < j && parray[j] >= key)
{
j--;
}
if (i < j)
{
parray[i] = parray[j];
}
while (i < j && parray[i] <= key)
{
i++;
}
if (i < j)
{
parray[j] = parray[i];
}
}
parray[i] = key;
if (i-1 > low)
{
quick_sort(parray, low, i-1);
}
if (i+1 < high)
{
quick_sort(parray, i+1, high);
}
return 0;
}
6.折半查找(二分查找)
时间复杂度O(nlogn)
从数组最中间查找,如果就是要找的值输出,如果不是但这个值大于中间的值,则它后面的数递归这个函数;如果不是但这个值小于中间的值,则它前面的数递归调用这个函数
int mid_search(int *parray, int low, int high, int tmpdata)
{
int mid = 0;
if (low > high)
{
return -1;
}
mid = (low + high) / 2;
if (tmpdata == parray[mid])
{
return mid;
}
else if (tmpdata > parray[mid])
{
return mid_search(parray, mid+1, high, tmpdata);
}
else if (tmpdata < parray[mid])
{
return mid_search(parray, low, mid-1, tmpdata);
}
}

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









