




CAN
CAN 控制器局域网 Controller Area Network
1983年德国博世(Bosch)公司开发设计的;
CAN总线是一种串行数据通信协议,其通信接口中集成CAN协议的物理层和数据链路层的功能,可完成对于通信数据的成帧处理,包括位填充、数据块编码、循环冗余校验、优先级判别等工作。
1 CAN特点
特点:多主工作(不分主次)、基于优先级逐步仲裁、1v1 1v多 、1Mbps 10km
- 多主方式工作,网络上任何一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,不分主从
- 基于优先级逐位仲裁,标识符越小,优先级越高。(若两个节点同时向网络上传送数据,优先级高的报文获得总线的访问权,优先级低的报文会在下一个总线周期自动重发);
- 可以 点对点、点对多以及全局广播等方式收发数据;
- 直接通信距离 最远10km(5 kps);
- 通信速率最大1Mbps(距离最长40m);
- 节点数实际可达110个;
- 每帧数据都有CRC校验及其他检错措施,数据出错率极低;
2 CAN报文
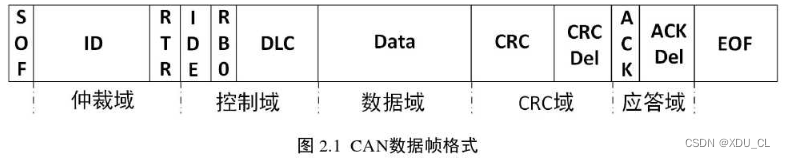
- SOF帧起始、ID标识符、RTR远程发送请求位、标识符扩展位IDE、保留位RB0/RB1、数据场中的数据长度DLC
- 数据域0~8个字节、CRC循环冗余检验15bit、CRC界定符 CRCDEL、ACK、ACK界定符、EOF帧结束
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9002
9002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









