



文件与文档获取
GREAT-PVT是武汉大学测绘学院GREAT团队设计并开发的一款面向全球导航卫星系统(GNSS)用户的开源软件。
GREAT-PVT的开源获取网址为https://github.com/GREAT-WHU/GREAT-PVT。
具体的本地配置内容与步骤可以参考开源文件里面自带的说明文档,以下是博主本人在进行调试过程中遇到的问题与对部分脚本文件的修改,主要涉及文件路径的修改,以及博主代码跑完后的结果,大致与所给文档相同。
如有需要可供参考。
-
文件配置
1.通过Cmake与Visual Studio2022构建GREAT-PVT 可执行程序
① 修改"D:\GREAT-PVT-main\GREAT-PVT-main\src"的顶层Cmake文件
原文件中的通过CheckCXXCompilerFlag检查编译器是否支持C++11,检测逻辑存在误差,导致编译选项设置失败。
修改后文件直接用set(CMAKE_CXX_STANDARD 11),避免了误差。
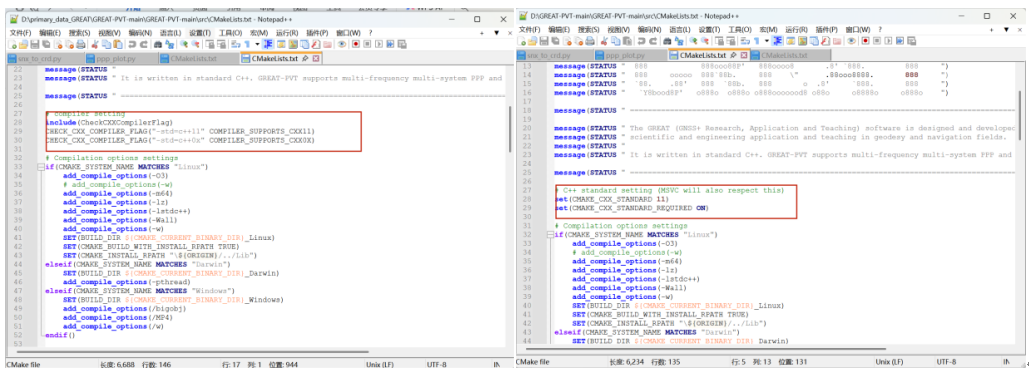
图1 顶层Cmake文件修改前后对比
②在Cmake中配置文件,生成build、build_Windows文件
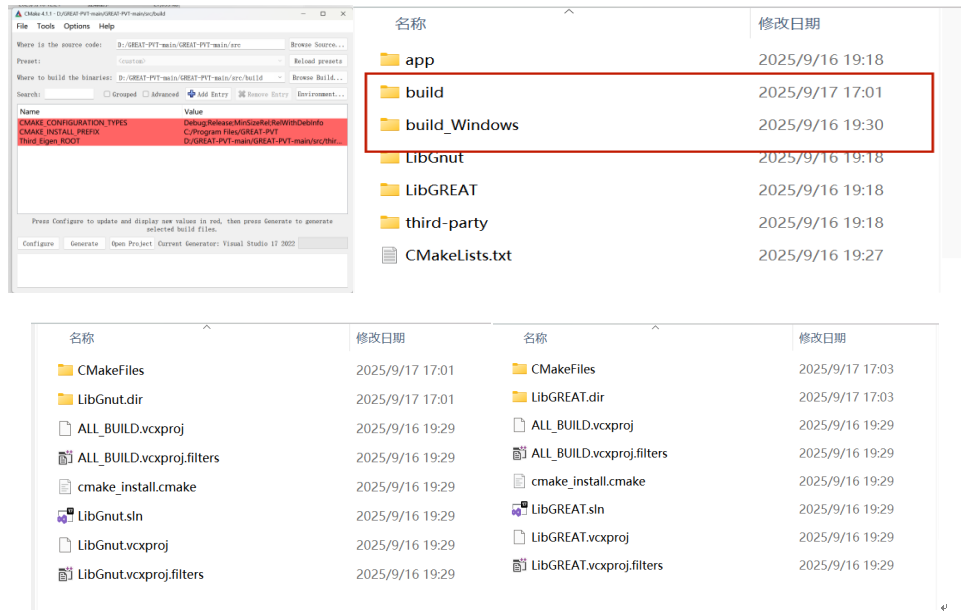
图2 配置生成文件
2.在Visual Studio2022中运行,生成GREAT_PVT.exe可执行文件
在"D:\GREAT-PVT-main\GREAT-PVT-main\src\build_Windows\Bin\Debug"目录下生成了进行解算所需要的GREAT_PVT.exe可执行文件。
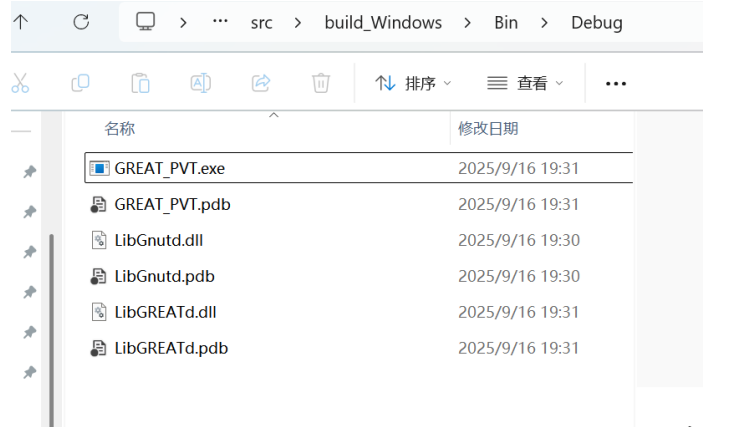
图3 GREAT_PVT.exe文件
GREAT_PVT.exe可以读取观测数据(.rinex文件)、星历数据、辅助数据三类数据,支持精密单点定位(PPP)、实时动态定位(RTK)两种定位模式。
-
数据解算
-
1.数据文件
①PPPFLT_2023305

图4 PPPFLT_2023305数据文件
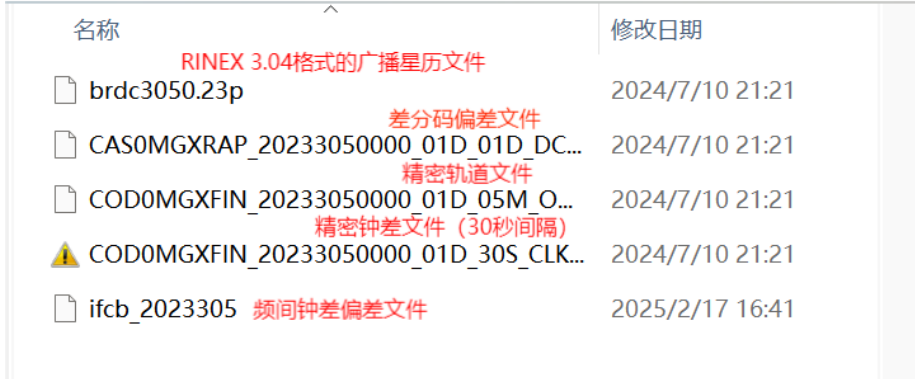
图5 gnss数据
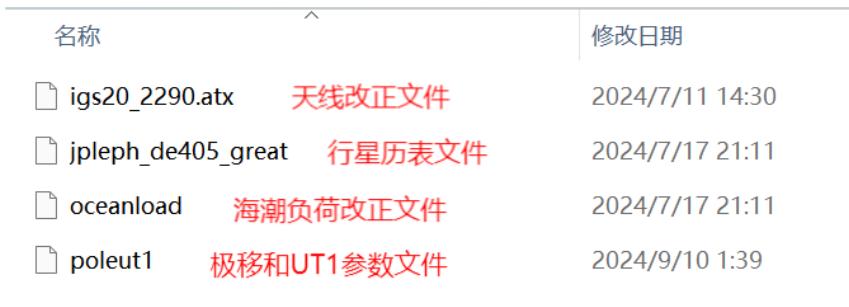
图6 model文件
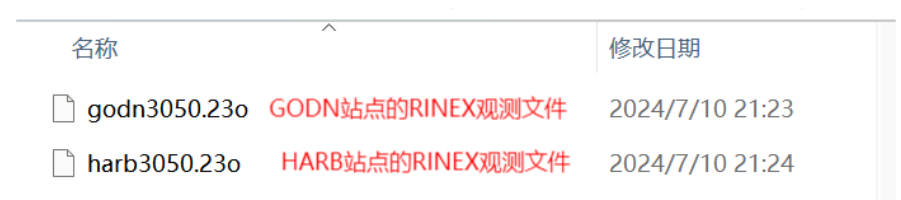
图7 obs文件
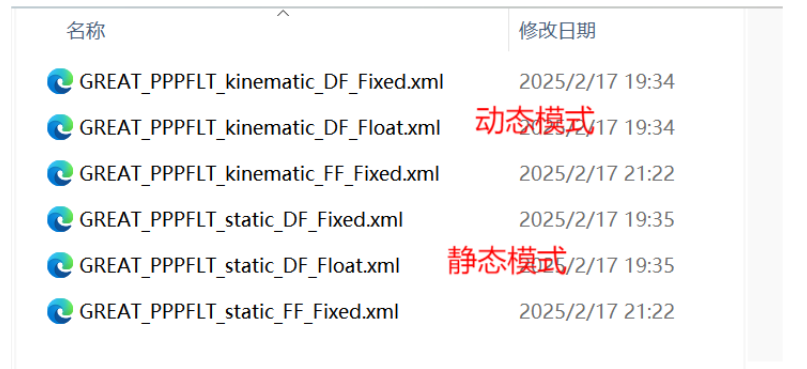
图8 xml文件
②RTKFLT_2020351
文件内容与PPPFLT_2023305大致相同。
2.单天解算
(1)利用Windows命令行进行数据解算
① PPP.xml、RTK.xml文件配置
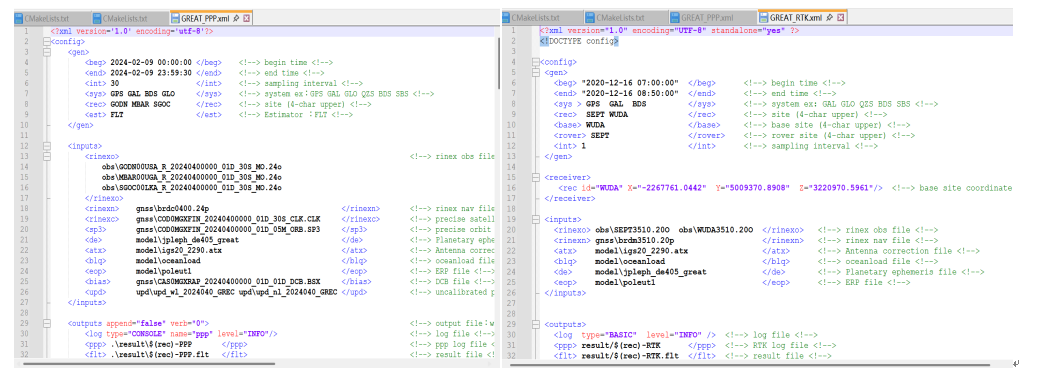
图9 PPP.xml和RTK.xml文件
② 输入指令后进行解算
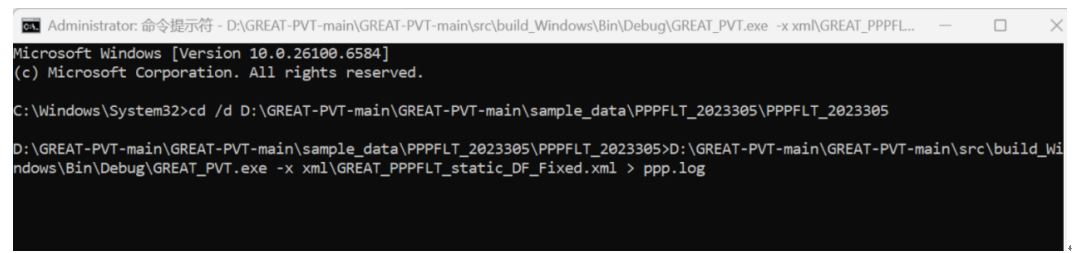
图10 PPP数据解算命令
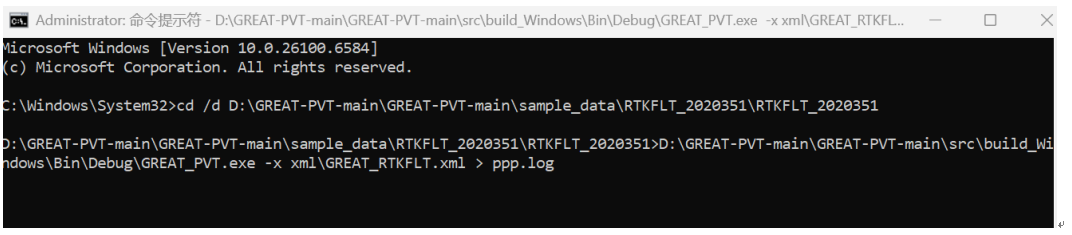
图11 RTK数据解算命令
③ PPP数据解算结果("D:\GREAT-PVT-main\GREAT-PVT-main\sample_data\PPPFLT_2023305\PPPFLT_2023305\result")

图12 PPP数据解算结果
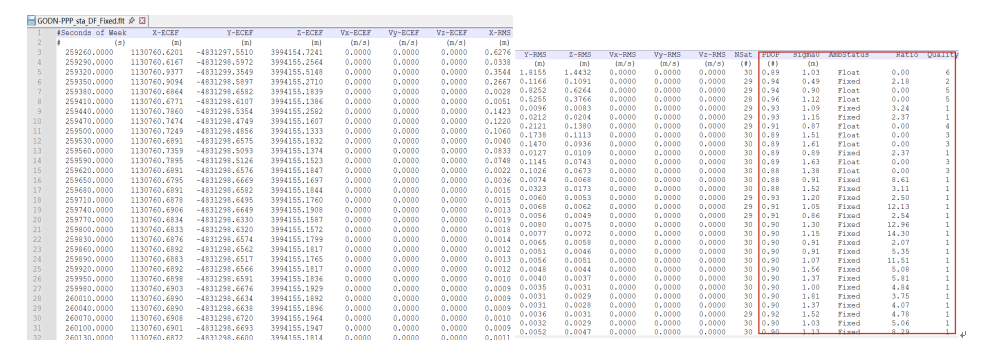
图13 GODN-PPP_sta_DF_Fixed.flt文件
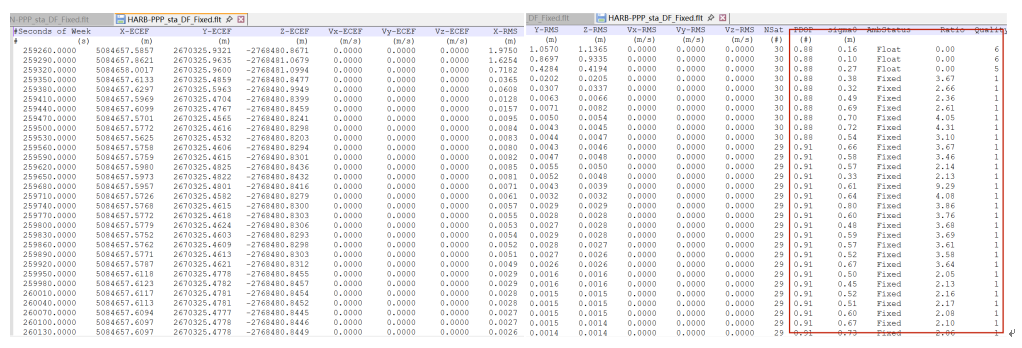
图14 HARB-PPP_sta_DF_Fixed.flt文件
结果文件中各项指标的数据和文档中结果大致相符合,大部分数据的PDOP值、sigma0、AmbStatus、Ratio值、Quality等指标达到较高的精度。
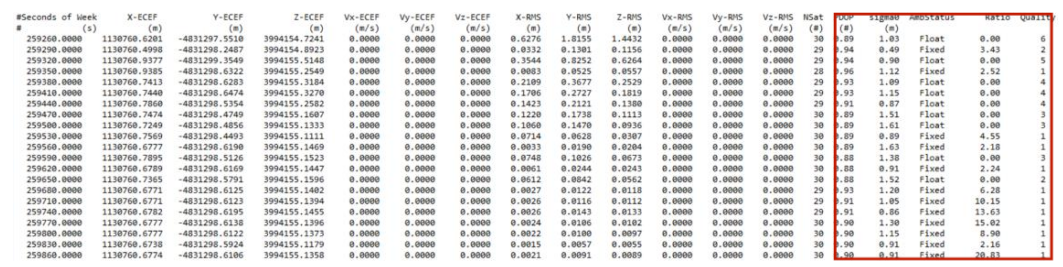
图15 文档中解算结果(部分)
④RTK数据解算结果("D:\GREAT-PVT-main\GREAT-PVT-main\sample_data\RTKFLT_2020351\RTKFLT_2020351\result")
图16 RTK数据解算结果
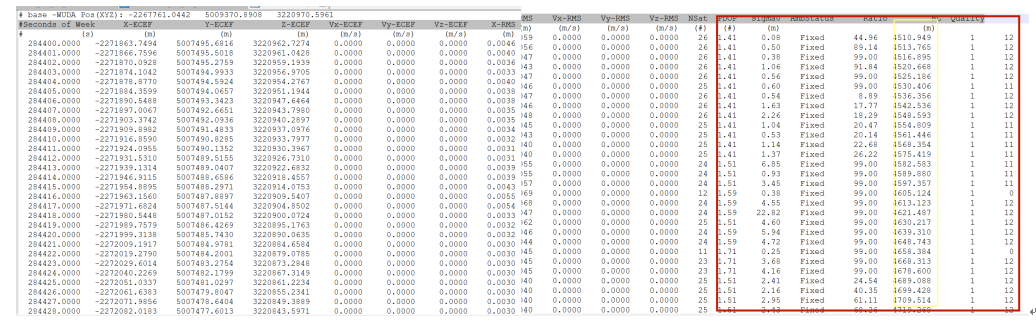
图17 SEPT-RTK.flt文件
RTK数据解算结果中的指标大致与PPP数据解算结果的指标相同,不同的是RTK中有BL(Baseline Length, m),即基线长度,指测站与参考站的距离。
RTK依赖参考站,解算的是基线向量(Baseline),再加上基准站坐标,得到流动站坐标。而PPP不依赖参考站,直接用钟差、星历等解算,所以没有BL这一列。
BL越短,RTK定位越容易固定,精度越高。本实验中的BL大致为4km,属于短基线,能够快速固定。
(2)运用Visual Studio2022进行数据解算
①PPP数据
表1 命令参数与工作目录设置

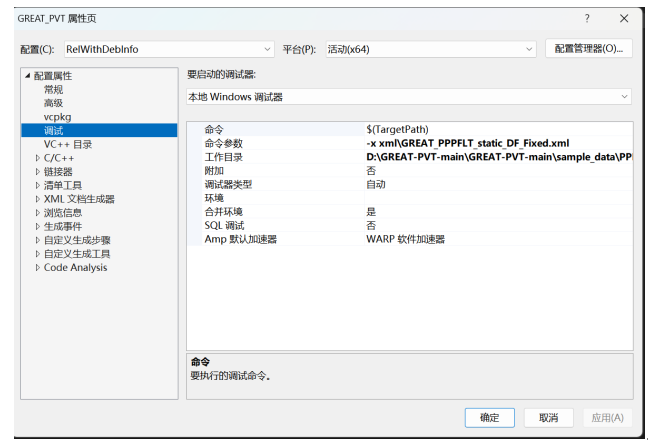
图18 命令参数与工作目录设置
②RTK数据
表2 命令参数与工作目录设置

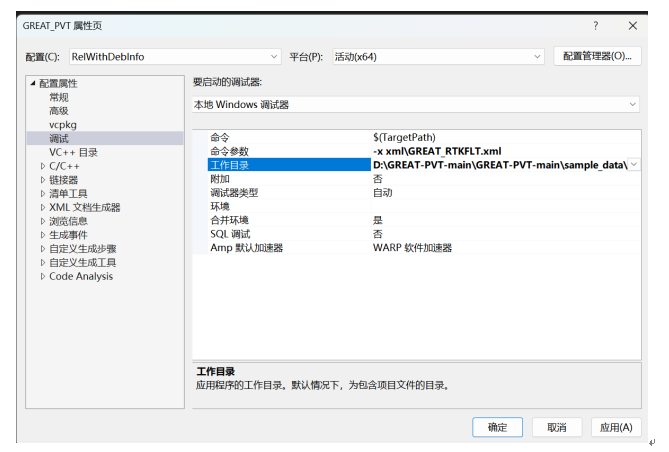
图19 命令参数与工作目录设置
③运算结果与在Windows命令行的解算结果相同
3.多天解算
①PPP批量处理解算python脚本文件修改
根据实际路径修改了site_path、project_path等。
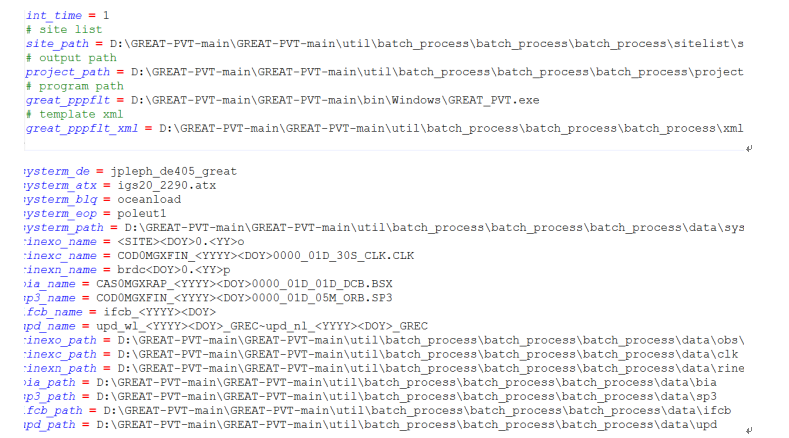
图20 PPP 批处理解算python脚本
②解算过程
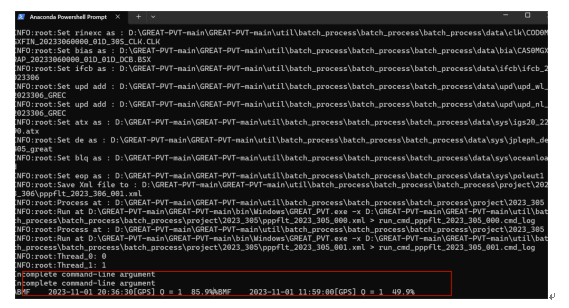
图21 多天解算过程
③多天解算结果
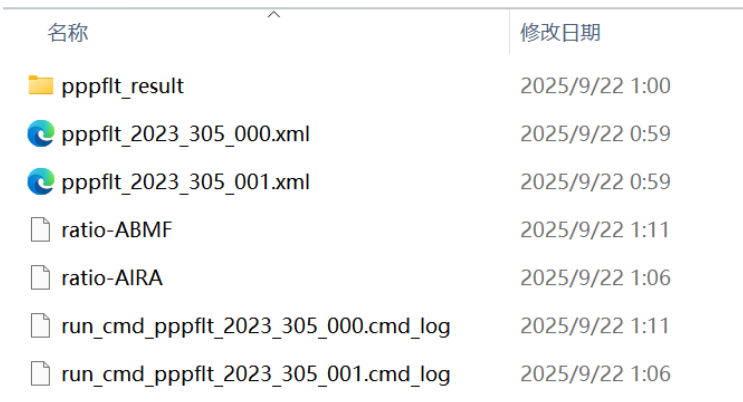
图22 2023_305解算结果文件
图23 2023_305result结果文件
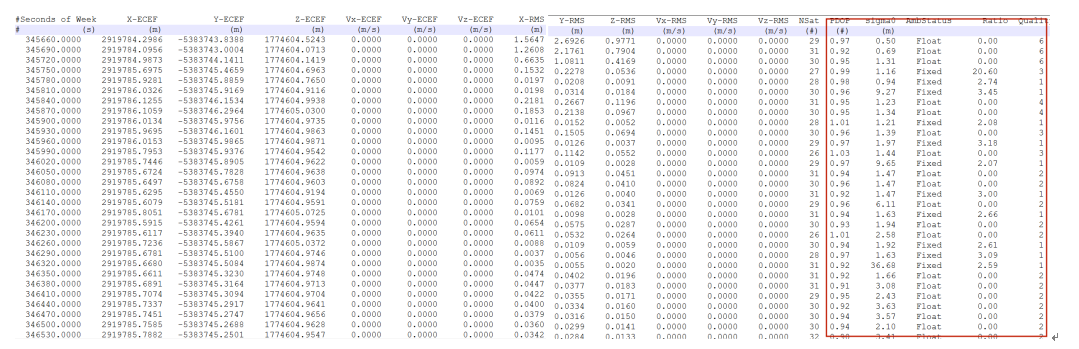
图24 ABMF_2023305.flt文件
图25 2023_306解算结果文件

图26 2023_306result结果文件
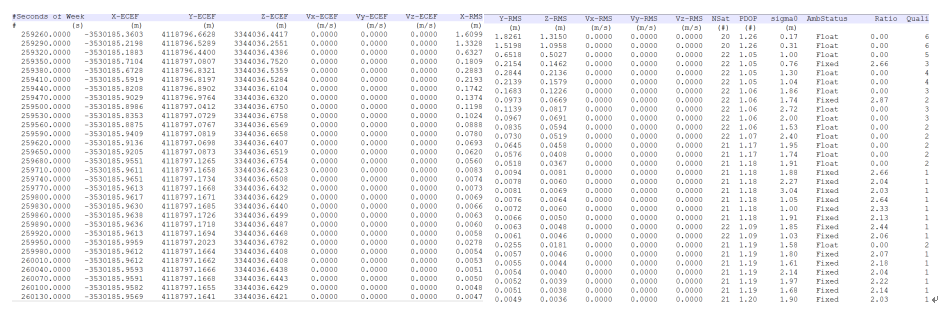
图27 AIRA_2023305.flt文件
-
结果绘制与分析
-
1.PPP结果绘制与分析
①配置文件
根据实际情况修改snx_to_crd.py、ppp_plot.py脚本文件相关内容的路径。
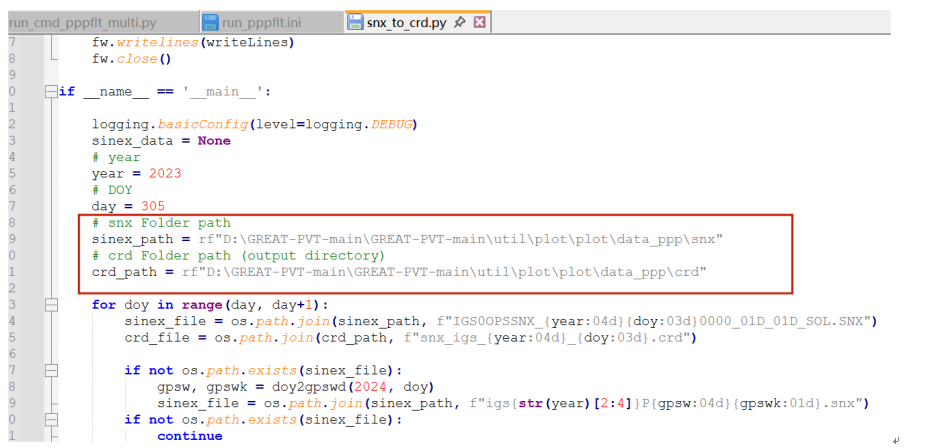
图28 snx_to_crd.py文件
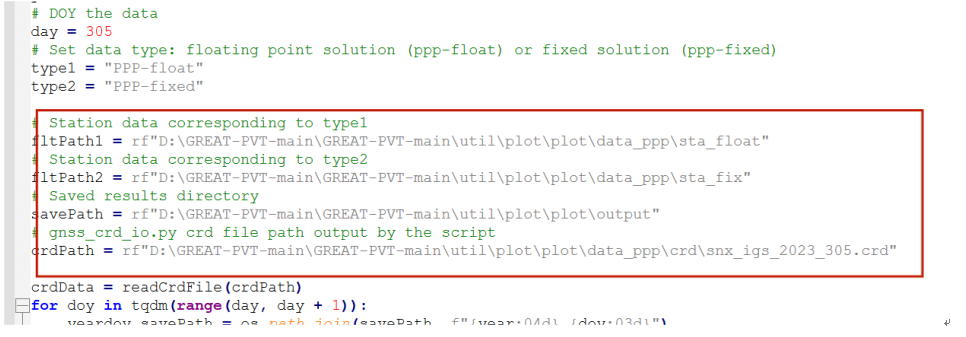
图29 ppp_plot.py文件
②绘制结果
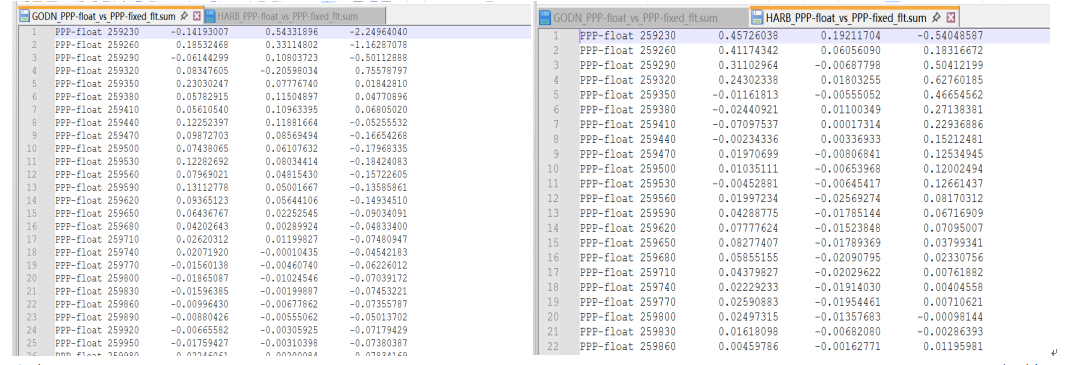
图30 GODN_PPP-float_vs_PPP-fixed_flt.sum、HARB_PPP-float_vs_PPP-fixed_flt.sum文件
.sum文件中,第一列标记解算模式,第二列是时间/历元标识,后三列依次为东向(East)、北向(North)、天向(Up)的坐标残差,即偏移量。
PPP-float模式下,残差存在明显波动,如东向、天向数值在不同历元有正负变化,因未固定载波相位模糊度,误差未被有效约束,导致残差离散。
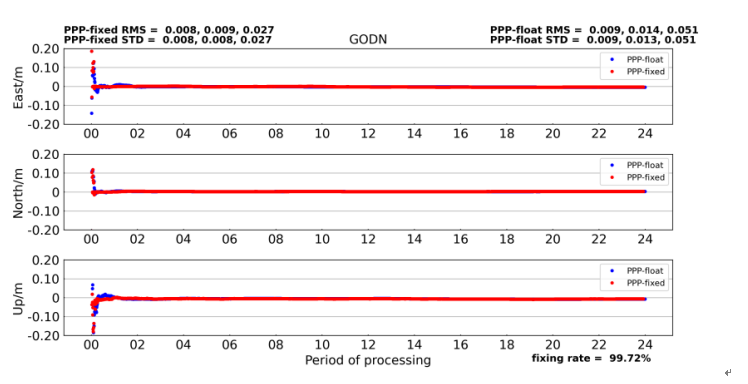
图31 GODN_PPP-float_vs_PPP-fixed_flt.png文件
由结果图中可以看出,东向PPP-float初始有明显离散波动,后续虽平稳但仍有细微起伏,PPP-fixed呈水平直线,残差稳定无波动;北向PPP-float初始有少量离散点,波动小于东向浮点解,PPP-fixed完全水平,残差极致稳定;天向PPP-float初始波动最显著,后续收敛但离散度仍高,PPP-fixed呈水平直线,稳定范围略宽于东、北向,但远优于浮点解。
RMS与STD精度指标,fixed均优于float,固定率为99.72%,可以成功固定绝大部分历元。
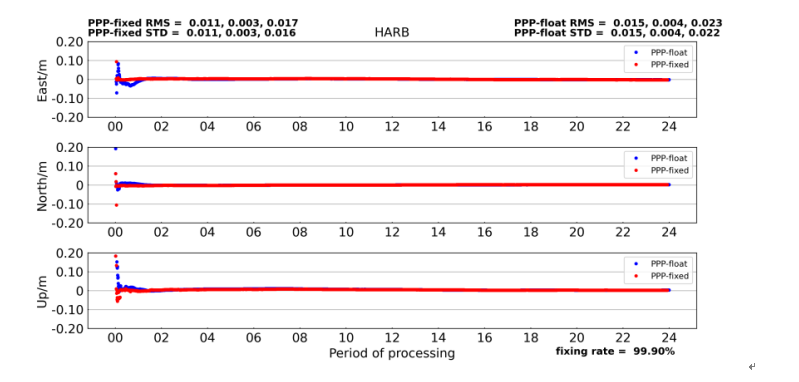
图32 HARB_PPP-float_vs_PPP-fixed_flt.png文件
HARB测站的情况与GODN测站情况大致相同,固定率为99.90%,模糊度固定率接近100%,解算质量高。
HARB测站的固定解精度固定率略优于GODN测站,反映前者观测环境与数据质量更优。
结果绘制与文档所给的示例大致相同,表现出本次实验成功完成。
2.RTK结果绘制与分析
①配置文件
根据实际情况修改rtk_plot.py脚本文件相关内容的路径。
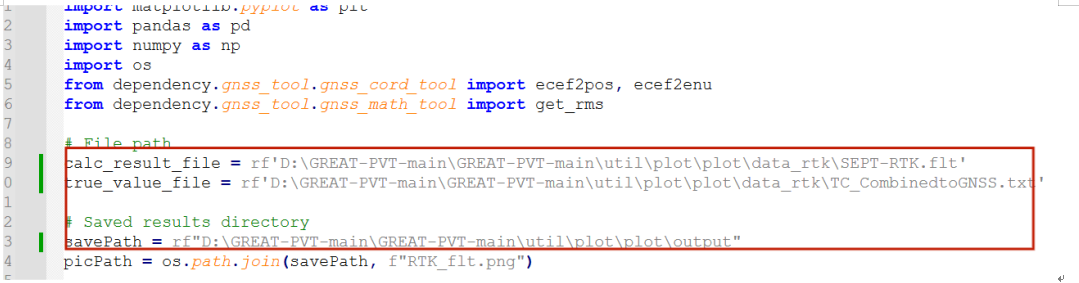
图33 rtk_plot.py文件
②绘制结果
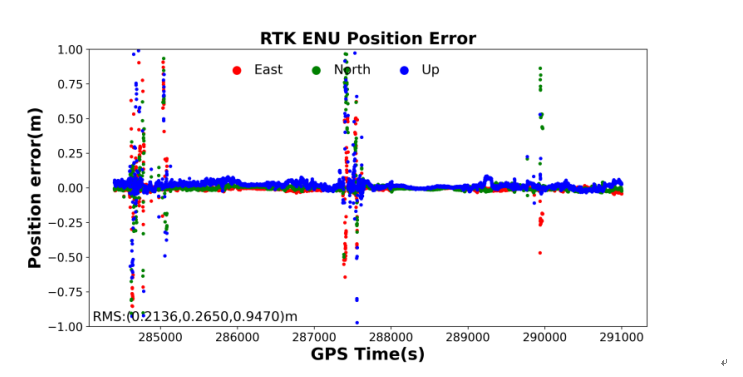
图34 RTK_flt.png文件
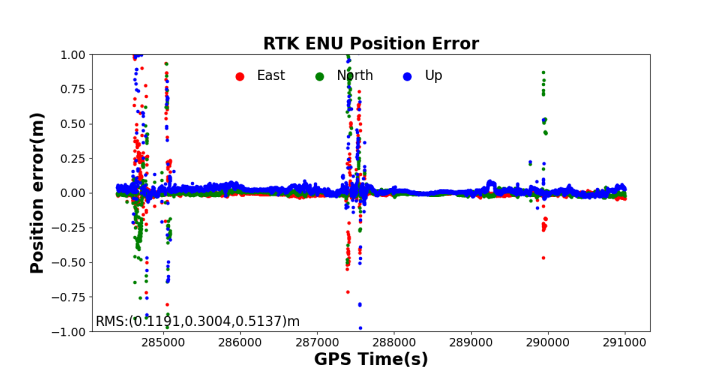
图35 文档中RTK_flt.png文件
Y轴Position error(m),表示RTK解算结果与参考真值的偏差。East误差波动相对明显,部分时间点,如285000秒附近、287000秒左右,出现±0.5米以上的尖峰;North整体比东向更集中,多数时间误差在0附近小范围波动;Up波动最平稳,绝大多数点集中在-0.25~0.25米范围内。
中间时段三个方向同时出现误差尖峰。
图中左下角标注的RMS(0.2136,0.2650,0.9470)m,分别对应东、北、天向的精度统计,垂直方向RMS明显更大,符合GNSS垂直方向精度通常低于水平方向的特点。
结果绘制与文档所给的示例大致相同,表现出本次实验成功完成。


















 813
813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









