



点击下方卡片,关注“具身智能之心”公众号
本文只做学术分享,如有侵权,联系删文
多年来,机器人基础模型始终以视觉语言预训练作为规模化发展的基石,这使得我们能够将现有大的多模态模型的语义泛化优势迁移至机器人领域。
然而scaling law好像在具身机器人领域不存在?
如何在本体机器人领域有效扩展大模型训练,建立可验证的扩展定律,证明机器人智能会随算力数据增长持续提升,还没有充分论证。这需要一套能拓展新感知运动能力、实现行为泛化的架构训练流程与数据引擎,并使其随真实物理世界交互产生的海量经验持续进化。
GEN-0来啦~
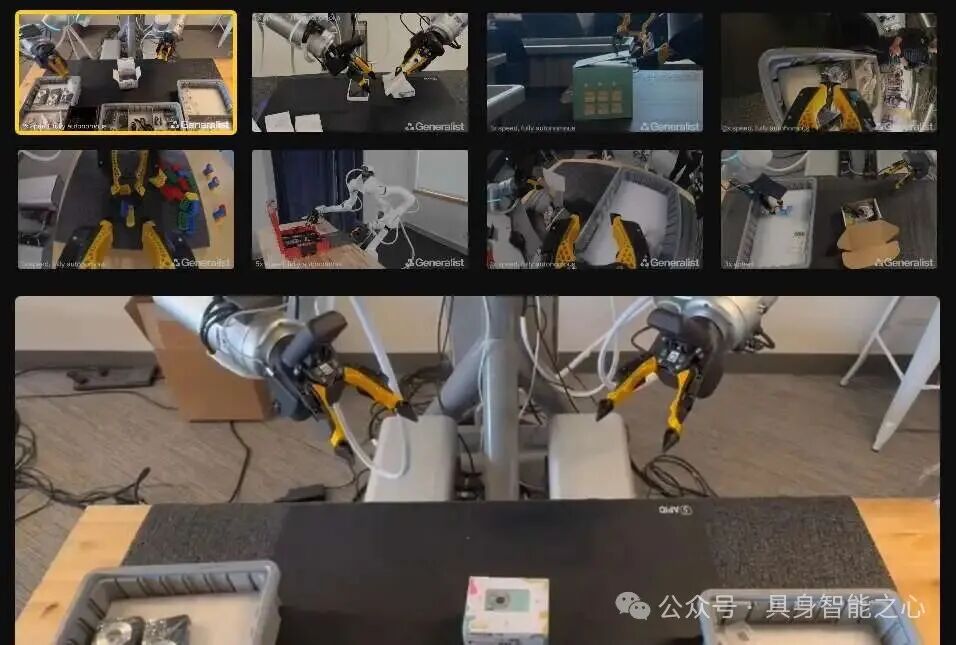
GEN-0是新型具身基础模型,由Generalist AI Team推出,专为直接基于高保真原始物理交互进行多模态训练构建。其架构继承视觉语言模型优势又实现突破:原生设计可捕捉人类级条件反射与物理常识,核心特性"谐波推理"使模型接受同步思维与行动的无缝训练。
项目介绍主页:https://generalistai.com/blog/nov-04-2025-GEN-0
与此同时,这些能力正在实现规模化演进:
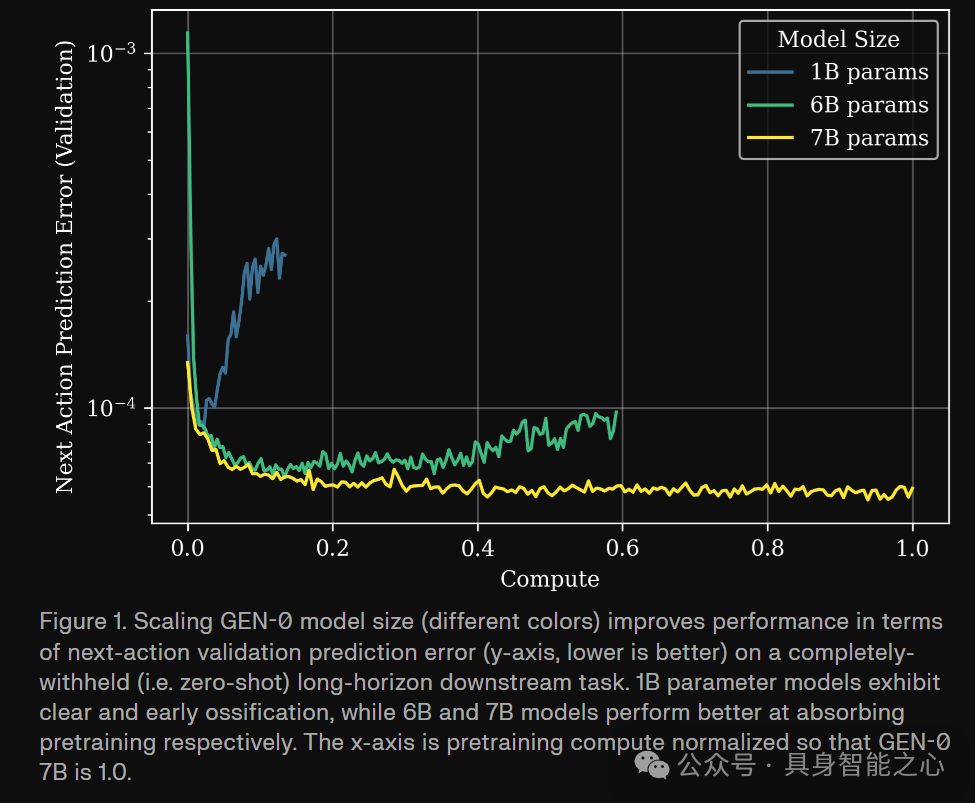
突破智能阈值:在机器人领域的海量数据环境中,观察到70亿参数临界点出现相变,较小模型呈现固化态势,而更大模型持续提升。目前GEN-0已扩展至100亿+参数规模,并展现出用越来越少训后数据快速适应新任务的能力
确立扩展定律:GEN-0模型展现出强扩展定律,更多预训练数据与算力持续(且可预测地)提升模型在多任务中的训后表现。
谐波推理机制:虽然语言聊天机器人可从容思考后再响应,但现实世界中行动的物理系统却无法止驻时间之流。谐波推理通过根本性创新训练方法,在异步连续时序的感知与行动标记流之间建立谐波互锁,使模型无需依赖双系统架构或推理时指导即可扩展至超大规模
跨本体通用性:GEN-0架构原生支持不同机器人平台。已在6自由度、7自由度及16+自由度半人形机器人完成验证。
突破数据瓶颈:GEN-0基于超27万小时真实世界异构操控数据进行预训练,该数据集正以每周1万小时的速度持续扩张且不断加速。
预训练科学:来自不同数据的预训练数据组合可培育出不同特性的GEN-0模型。
GEN-0标志着一个新时代的开端:这类具身基础模型的能力将随着真实物理交互数据,而非仅靠文本、图像或模拟数据实现可预测的持续增长!
更多干货,欢迎加入国内首个具身智能全栈学习社区:具身智能之心知识星球(戳我),这里包含所有你想要的。

突破智能的临界点
规模化实验表明,GEN-0模型必须具备足够大的参数量才能吸收海量物理交互数据。研究还发现较小模型在数据过载时会出现类似"固化"现象,而更大模型则持续提升,这揭示了模型智能容量存在惊人的"相变"规律:
10亿参数模型在预训练阶段难以消化复杂多元的感觉运动数据,模型权重随时间推移逐渐丧失吸收新信息的能力;
60亿参数模型开始从预训练中获益,展现出强大的多任务处理能力;
70亿以上参数模型能够内化大规模机器人预训练数据,仅需数千步微调即可将知识迁移至下游任务;
这是首次在机器人学领域观察到模型固化现象。
过去的研究为什么发现不了?
未能发现这一现象可能源于:机器人领域长期缺乏足够大规模的数据体系;未曾在此领域部署足够庞大的模型规模。
虽然先前在LLM文献中已观察到高数据量下的固化现象,但那些模型的参数规模仅千万级,而非十亿量级。机器人领域出现相同相变现象却需要更大模型规模的事实,正呼应了莫拉维克悖论:人类不费吹灰之力的感知与灵巧操作,其实比抽象推理需要更高的计算复杂度。
机器人的Scaling Laws
缩放定律通常通过预训练阶段进行衡量。如图1所示,它揭示了预训练期间模型规模、计算量与下游零样本任务性能之间的关联。另一种类型的缩放定律则关乎预训练对微调阶段的持续增益效应。在达到足够的模型规模时,我们同样观察到预训练数据规模与下游微调性能之间存在显著幂律关系,这一规律适用于已评估的所有任务场景。
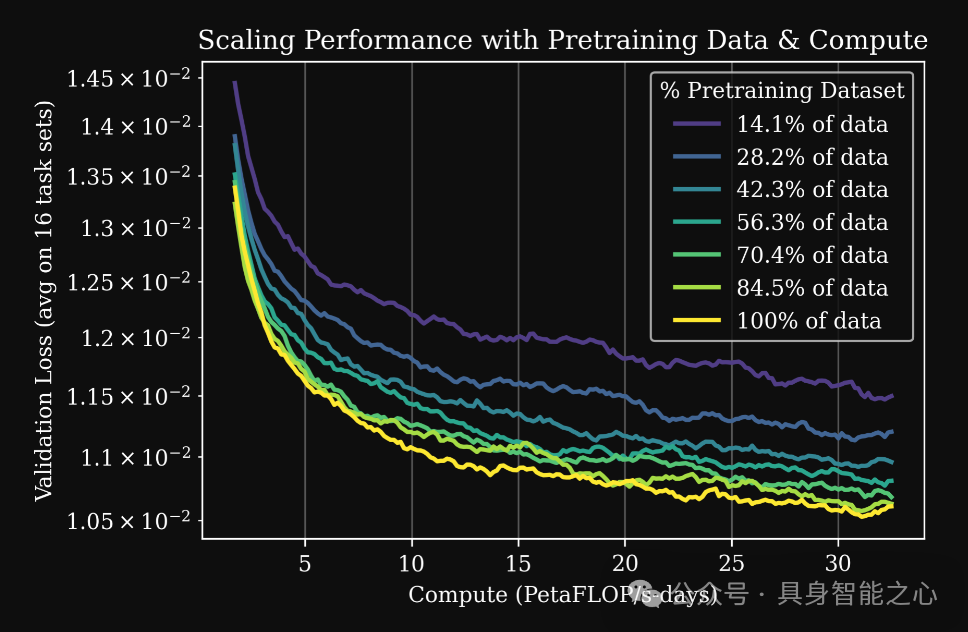
这里选取了在不同预训练数据子集上获得的系列模型的checkpoint,随后基于多任务语言条件数据。即同时在16个不同任务集上进行监督微调,对这些checkpoint实施后训练。研究发现:增加预训练数据能系统性地提升所有下游任务的模型性能(图2)。
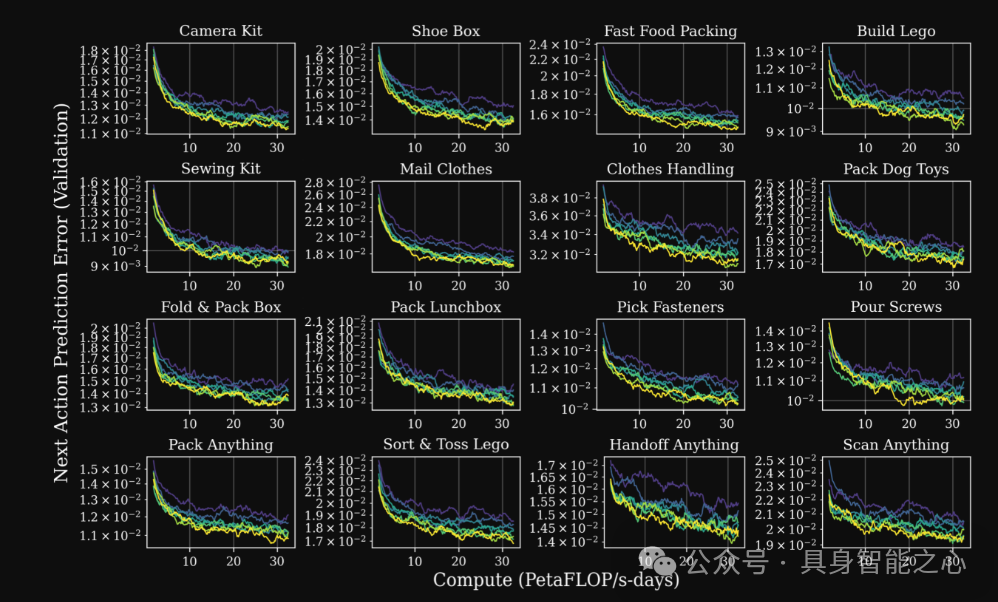
图2:随着预训练数据的持续增加(以不同颜色标示),模型在后训练阶段的多任务性能均得到提升,这体现在验证损失值的降低上。
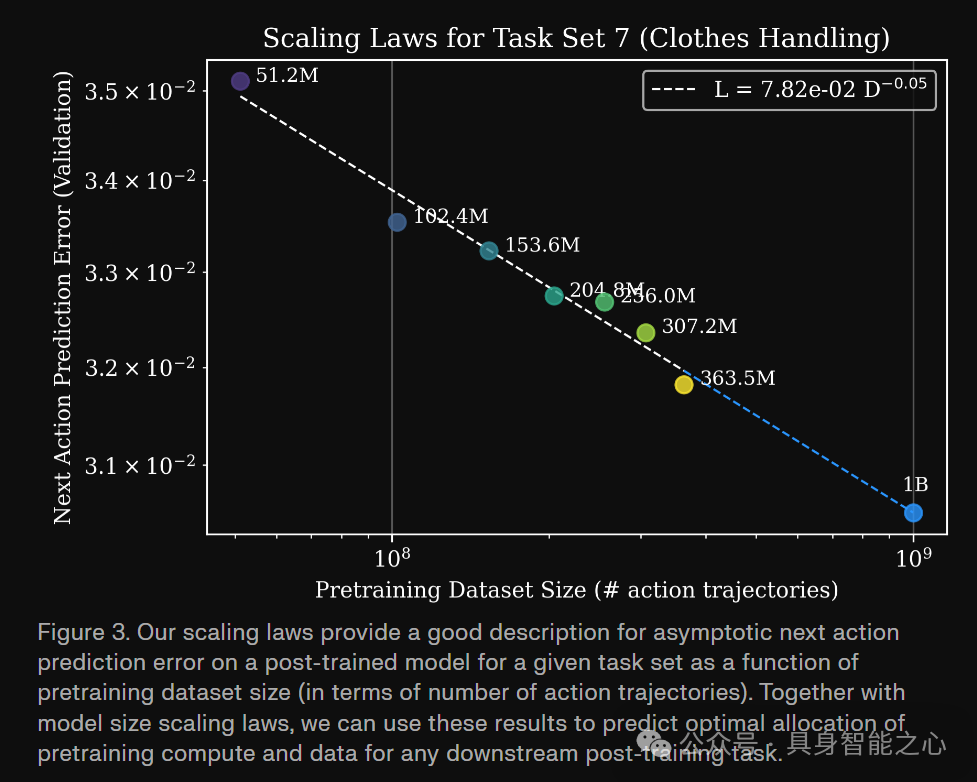
模型性能可通过幂律关系进行准确预测(图3)。基于该定律,能够解答诸如"要达到特定水平的下一动作预测误差,需要多少预训练数据"或"增加预训练数据可等效替代多少后训练数据"等关键问题。在给定下游任务固定数据D与微调预算的前提下,对于不同规模的预训练数据集,下游任务的验证误差L(.)可通过以下形式的幂律关系进行预测:
机器人再也不会被数据限制
本基础模型在27万小时真实世界操作轨迹数据进行训练,这些数据采集自全球数千个家庭、仓库及工作场所的多样化作业场景。目前,机器人数据运营系统每周新增超1万小时的数据,且增速仍在提升。这一切都由覆盖全球的硬件网络及数千台数据采集设备与机器人共同驱动。
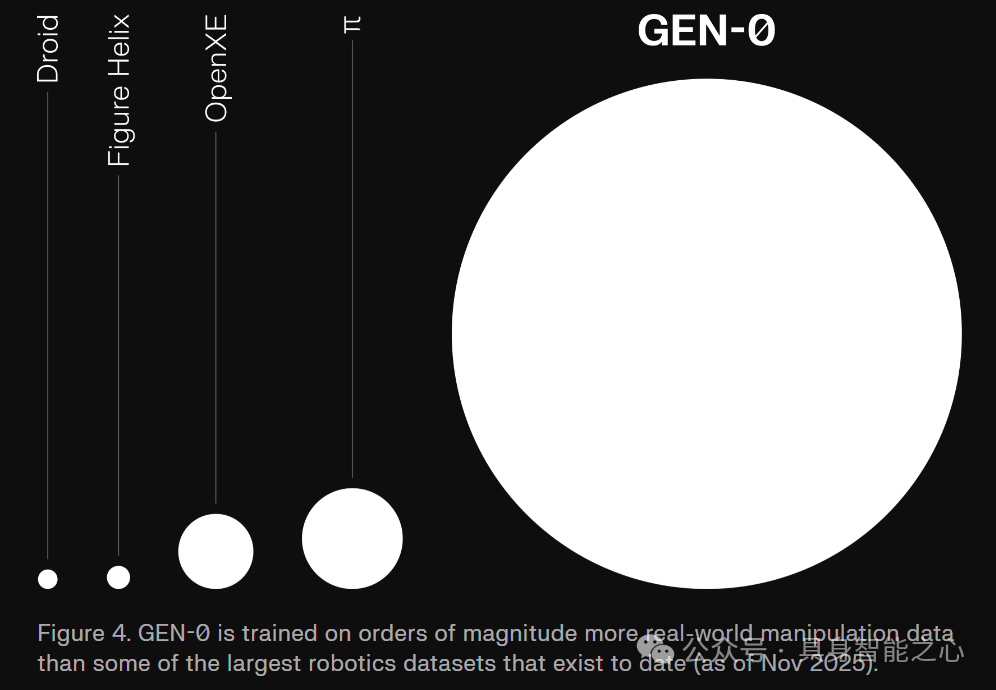
为扩展GEN-0的能力边界,Generalist AI Team正在构建史上规模最庞大、最多元的真实世界操作数据集,涵盖人类能设想的所有操作任务:从削土豆皮到拧螺栓,场景覆盖家庭、烘焙坊、洗衣房、仓库、工厂等各类环境。
写在最后
更多具身内容与行业分享,欢迎添加峰哥微信oooops-life做进一步沟通。


















 5398
5398

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









