



作者 | burgess 编辑 | 自动驾驶之心
原文链接:https://zhuanlan.zhihu.com/p/1932761842775752743
点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
本文只做学术分享,如有侵权,联系删文
智驾无图到底是什么,目前各家用图的方案基本明朗,接下来分享下目前智驾地图的种类:
座舱导航图:比如高德autosdk,从这里我们能获取静态信息,包括导航轨迹link点(经纬度坐标),link对应的道路等级、道路属性等;同时还有动态信息,包括前景车道/背景车道,导航action,比如靠左或靠右,左转或右转。座舱地图本来是给人开车用的,是一种tbt(turn by turn)导航。
智驾sd地图:带有道路骨架信息的地图,不仅仅包含导航方向的道路信息,还包括路口的分叉路道路信息。可以理解为座舱导航的升级版,把网状的道路形点和属性信息都给出来,比如我们可以知道前方是一个十字路口还是一个T字路口,仅仅是座舱导航是拿不到的。sd地图是怎么播发的呢?两种方式adasis v2协议和map api。
adasis v2是为辅助驾驶制定国际标准协议,通过网络或者can协议以message包的组织形式发送,需要配合EHR(Electronic Horizon Reconstructor)电子地平线解析。目前有几家第一梯队智驾在用,基本都是定制版本。
map api就是一个sdk api接口,图商封装好后,想要的信息就可以直接通过接口去调用,使用方案,也是大势所趋,没有adasis复杂的组帧逻辑,不用考虑数据传输丢帧的问题。
智驾sd地图目前用得比较多的是腾讯地图,一般智驾Tier 1会选用。
智驾sdpro地图:带有车道拓扑结构的sd地图,什么是车道拓扑结构?当前link有2条车道,每条车道标记1和2,下一个 link有4条车道,每条车道标记3、4、5和6,以及他们之间的连接关系,1->3,1->4,2->5,2->6。这些拓扑关系对导航非常有用,比如我要到目标车道6,车道6对应的前继车道是车道2,因此就需要提前变道到车道2上。有了拓扑结构可以避免很多无效变道,或者前方拥堵的情况下走错车道变不过去等问题。目前高德在这块发力,从智驾发展趋势上,sdpro基本是未来地图的主要形态。sd地图也有一个问题,比如gps遮挡场景下的分叉路,定位漂移后可能走错,强依赖定位绑定正确的道路link,有概率出现绑错link智驾乱开的情况。
智驾轻地图:HD地图已经证明了这条路走不通后,所有的图商都转变为以视觉众包更新为主的轻地图方案,制作轻地图需要用激光采集车进行打底,先构建底图,然后在上面进行视觉更新。相比于sdpro地图,部分车道线和车道中心线被保留下来,基本是高精度地图的乞丐版,地图要素少非常多,基本只有停止线、斑马线、部分场景车道线(线型加属性)、车道中心线(线型加属性),以及车道级联通关系。轻图的更新周期相比于HD快非常多。
轻地图目前做得比较好的有百度LD,但也面临着更新慢的问题,毕竟想绘制全国所有车道级的地图数据并及时更新是非常难的一件事情。
主机厂/oem的众包地图:图商的地图跟不上智驾发展的节奏,索性就自己干。众包地图就是主机厂自己的轻地图。不少家自建复杂场景下的地图图层,尤其是路口场景,毕竟大部分场景只靠sd地图都是能开的。自建图层的好处就是地图数据和地图格式自己掌控,能快速满足内部智驾侧的需求。一般来说众源地图都绑定在图商的sd地图上,一旦sd地图有更新,众源的地图也要重新更新绑定关系。只是复杂场景的patch,更新绑定关系问题也不大,毕竟全国复杂场景patch数从几万到几百万个不等,看各家智驾的能力水平。
总结:
座舱地图、sdmap、sdpro、轻地图/众包地图,地图要素逐渐增加,地图适用范围逐渐减少,地图鲜度也逐渐变差。
智驾到底想要什么地图?端到端上来绝大部分场景只需要sdmap就够了,但要开得好sdpro或者众包图也是必要项,毕竟有一个准确的先验信息,对智驾真的很友好。
端到端智驾地图以怎么样的姿态存在?目前大部分端到端的架构,地图是模型的输入,也是规则策略部分必不可少的信息源。
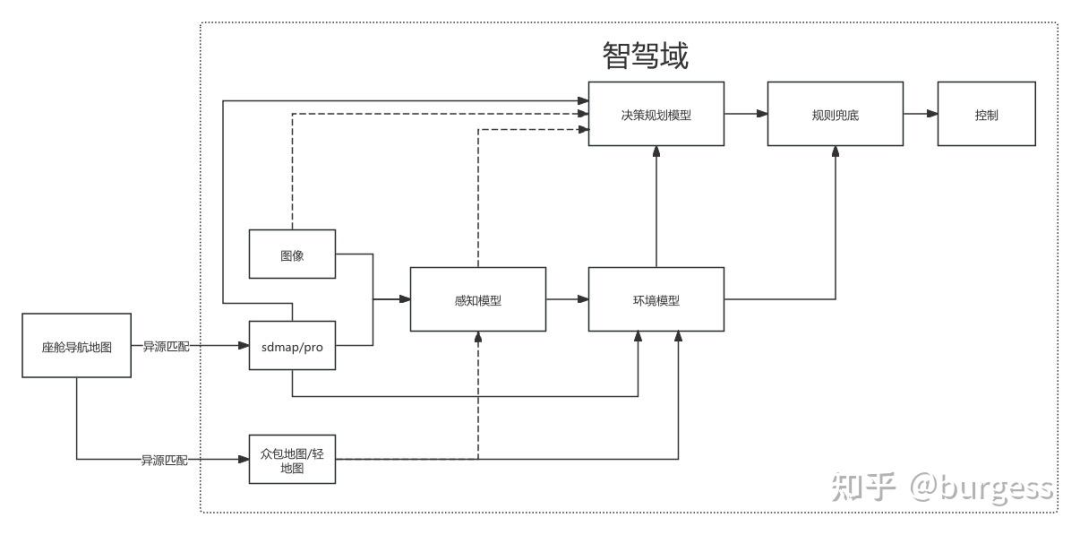
上图虚线部分各家的方案不一样,也就是宣称的一段式或两段式。
自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 861
861

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









