



作者 | 小书童 来源 | 集智书童
点击下方卡片,关注“自动驾驶之心”公众号

🚧 YOLO26 模型仍在开发中,尚未发布。此处显示的性能数据为预览。最终的下载和正式发布将很快跟进 — 请通过 YOLO Vision 2025 获取最新信息。
概述
Ultralytics 的 YOLO26 是 YOLO 系列实时目标检测器的最新演进,专为边缘和低功耗设备从头设计。它引入了一套简化的设计,去除不必要的复杂性,同时集成了有针对性的创新,以实现更快、更轻量、且更易于部署的模型。
YOLO26 的架构由三个核心原则驱动:
• 简洁性: YOLO26 是一个原生端到端模型,直接输出预测结果,无需非极大值抑制(NMS)。通过消除这个后处理步骤,推理更快、更轻、更易于在实际系统中部署。这一端到端方法最早由清华大学的 Ao Wang 在 YOLOv10 中率先提出,并在 YOLO26 中得到进一步推进。
• 部署效率: 端到端设计去掉了整段流水线,显著简化集成、降低延迟,并提升在多样环境下的部署鲁棒性。
• 训练创新: YOLO26 引入了 MuSGD 优化器,它是 SGD 与 Muon 的混合体——灵感来自 Moonshot AI 在大模型训练上的 Kimi K2 突破。该优化器带来更稳定和更快的收敛,将语言模型的优化进展迁移到计算机视觉领域。
这些创新共同提供了一个在小目标上拥有更高精度、部署无缝且在 CPU 上最多提升 43% 推理速度的模型家族——使 YOLO26 成为资源受限环境下最实用、最易部署的 YOLO 模型之一。
主要特性
• 移除 DFL
分布焦点损失(DFL)模块虽然有效,但常常增加导出复杂度并限制硬件兼容性。YOLO26 完全移除了 DFL,简化了推理并扩大了对边缘和低功耗设备的支持。• 端到端无 NMS 推理
与依赖 NMS 作为独立后处理步骤的传统检测器不同,YOLO26 是原生端到端的。预测直接生成,减少延迟,使得在生产系统中的集成更快、更轻、更可靠。• ProgLoss + STAL
改进的损失函数提升检测精度,尤其在小目标识别方面有显著改进,这对物联网、机器人、航拍影像和其他边缘应用非常关键。• MuSGD 优化器
一种将 SGD 与 Muon 相结合的新型混合优化器。灵感来自 Moonshot AI 的 Kimi K2,MuSGD 将大模型训练中的高级优化方法引入计算机视觉,带来更稳定的训练和更快的收敛。• CPU 推理速度提升最多达 43%
YOLO26 针对边缘计算进行了专门优化,在无 GPU 的设备上也能提供近实时性能。
支持的任务与模式
YOLO26 被设计为一个多任务模型家族,扩展了 YOLO 在不同计算机视觉挑战中的适用性:
模型 | 任务 | 推理 | 验证 | 训练 | 导出 |
|---|---|---|---|---|---|
YOLO26 | 检测 | ✅ | ✅ | ✅ | ✅ |
YOLO26-seg | 实例分割 | ✅ | ✅ | ✅ | ✅ |
YOLO26-pose | 姿态/关键点 | ✅ | ✅ | ✅ | ✅ |
YOLO26-obb | 定向检测 | ✅ | ✅ | ✅ | ✅ |
YOLO26-cls | 分类 | ✅ | ✅ | ✅ | ✅ |
该统一框架确保 YOLO26 适用于实时检测、分割、分类、姿态估计和定向目标检测——在发布时均支持训练、验证、推理与导出。
性能指标
📊 YOLO26 系列基准预览(早期版本)
注意:以下为训练完成前的早期预览数据。最终指标及可下载权重将在训练完成后发布。
🔍 目标检测(COCO)
训练数据:COCO(80 个预训练类别)
使用指南:模型发布后请参考 Detection Docs
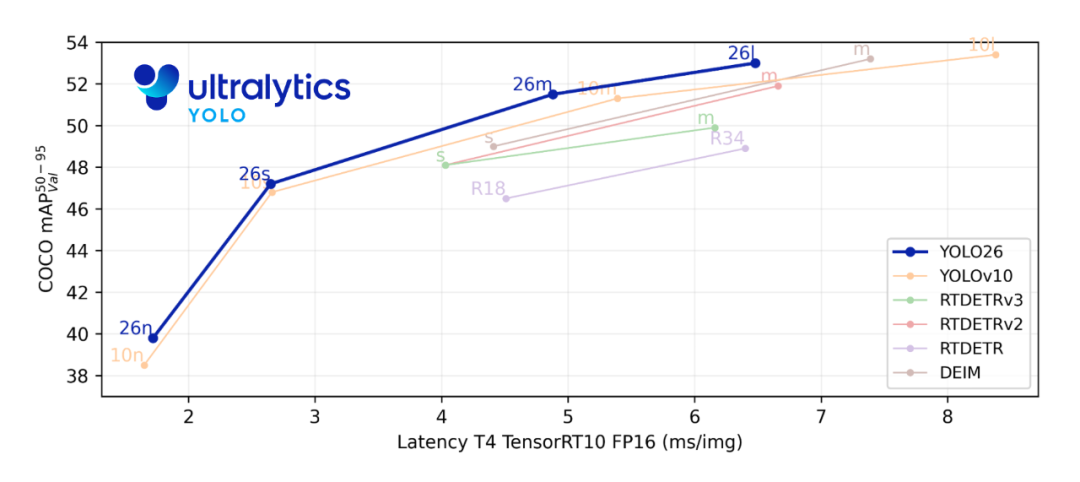
模型 | 输入尺寸 | mAPval | mAPval | 推理速度 | 推理速度 | 参数量 | FLOPs |
|---|---|---|---|---|---|---|---|
YOLO26n | 640 | 39.8 | 40.3 | 38.90 ± 0.7 | 1.7 ± 0.0 | 2.4 | 5.4 |
YOLO26s | 640 | 47.2 | 47.6 | 87.16 ± 0.9 | 2.7 ± 0.0 | 9.5 | 20.7 |
YOLO26m | 640 | 51.5 | 51.7 | 220.0 ± 1.4 | 4.9 ± 0.1 | 20.4 | 68.2 |
YOLO26l | 640 | 53.0* | 53.4* | 286.17 ± 2.0* | 6.5 ± 0.2* | 24.8 | 86.4 |
YOLO26x | 640 | — | — | — | — | — | — |
注:YOLO26l 和 YOLO26x 的指标仍在评估中,最终结果将在此更新。
📌 其他任务(指标即将发布)
任务类型 | 数据集 | 状态 |
|---|---|---|
实例分割(Segmentation) | COCO | 性能指标即将发布 |
图像分类(Classification) | ImageNet | 性能指标即将发布 |
姿态估计(Pose) | COCO | 性能指标即将发布 |
有向边界框检测(OBB) | DOTA v1 | 性能指标即将发布 |
与 YOLO11 相比,YOLO26 的主要改进是什么?
• 移除 DFL:简化导出并扩大边缘兼容性
• 端到端无 NMS 推理:取消 NMS 实现更快、更简单的部署
• ProgLoss + STAL:提升精度,尤其是小目标
• MuSGD 优化器:将 SGD 与 Muon(受 Moonshot 的 Kimi K2 启发)结合,带来更稳定、高效的训练
• CPU 推理速度最多提升 43%:为仅 CPU 的设备带来重大性能提升
YOLO26 会支持哪些任务?
YOLO26 设计为一个统一的模型家族,发布时将对多种计算机视觉任务提供端到端支持:
• 目标检测
• 实例分割
• 图像分类
• 姿态估计
• 定向目标检测 (OBB)
每个尺寸变体(n、s、m、l、x)计划在发布时支持所有任务。
为什么 YOLO26 针对边缘部署进行了优化?
YOLO26 在边缘设备上实现一流的性能,主要得益于:
• 在 CPU 上推理速度提升最多 43%
• 减小模型体积和内存占用
• 架构简化以提高兼容性(无 DFL、无 NMS)
• 支持灵活的导出格式,包括 TensorRT、ONNX、CoreML、TFLite 和 OpenVINO
自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com


















 8598
8598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









