



“世界模型能够从根本上解决VLA系统对数据的依赖,是伪命题。”
柱哥这两天和星球大佬讨论VLA和WA的路线之争,分享给大家。
2025年的自动驾驶赛道正分裂为两大阵营:小鹏、理想、元戎启行押注 VLA路线,华为、蔚来则力推世界行为模型(WA)。后者认为WA才是能真正实现自动驾驶的终极方案。然而血淋淋的现实是:这不过是个套壳的数据依赖论。
VLA依赖海量数据训练得到的VLM进一步扩展Action的能力,但工业界最得天独厚的优势就是有海量的数据,这给模型研发提供了无限可能。在普通场景大家都已经做到99.9%的能力下,长尾场景才是既分高下也决生死的所在。
世界模型为什么会被吹捧,生成式的方法理论上可以无限扩展corner case,但生成的前提是用海量真实数据训练物理规则认知框架。
你去生成一个卡车在马路上打篮球的场景,理论上虽然可以,但实际上VLA也好,WA也好,都未必能真正理解。
世界模型的本质也不过是数据驱动的模型泛化,真正的答案可能既不是“A”也不是“B”,仿真数据/生成数据也并不能完全替代真实数据。
两条路线都建立在“数据决定上限”的底层逻辑。VLA依赖真实场景的多模态数据训练Reasoning的能力;世界模型则需要“真实数据打底 + 仿真数据扩量” 的双重buff,其泛化能力本质是对数据多样性的迁移。
行业陷入的误区在于混淆“数据形式”与“数据本质”。世界模型想利用仿真数据减少对真实长尾数据的依赖,但业内真正做的怎么样,还要打一个问号¿
这个话题就不应该讨论“是否依赖数据”,而是如何高效利用数据。VLA与WA,不过是数据采集与使用方式的差异。在真正的人工智能到来前,数据永远是自动驾驶的核心竞争力。
以上。
如果您也想和自动驾驶学术界或工业界的大佬交流,欢迎加入自动驾驶之心知识星球。我们是一个认真做内容的社区,一个培养未来领袖的地方。

『自动驾驶之心知识星球』目前集视频 + 图文 + 学习路线 + 问答 + 求职交流为一体,是一个综合类的自驾社区,已经超过4000人了。我们期望未来2年内做到近万人的规模。给大家打造一个交流+技术分享的聚集地,是许多初学者和进阶的同学经常逛的地方。
社区内部还经常为大家解答各类实用问题:端到端如何入门?自动驾驶多模态大模型如何学习?自动驾驶VLA的学习路线。数据闭环4D标注的工程实践。快速解答,方便大家应用到项目中。
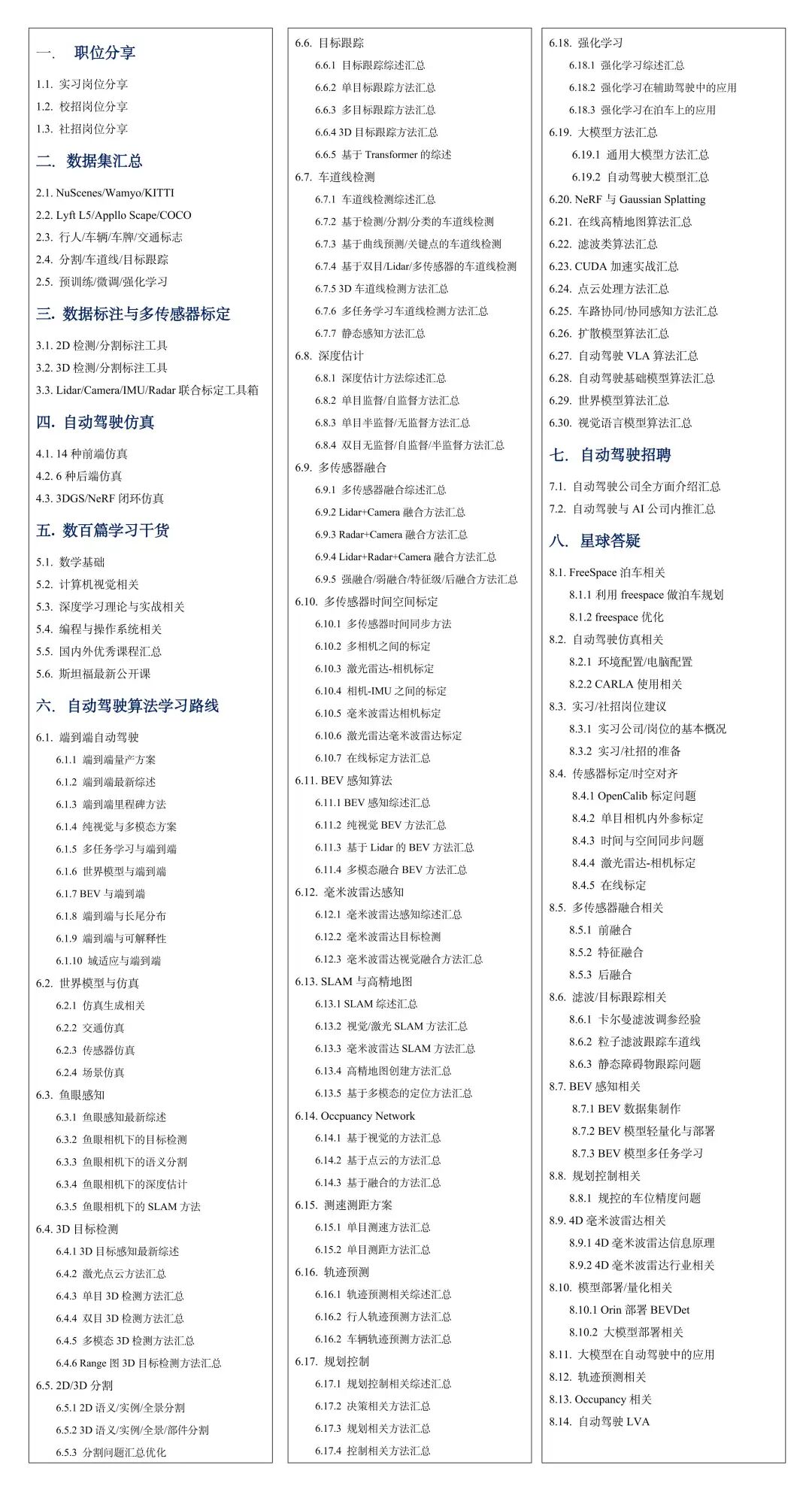
更有料的是:星球内部为大家梳理了近40+技术路线,无论你是咨询行业应用、还是要找最新的VLA benchmark、综述和学习入门路线,都能极大缩短检索时间。星球还为大家邀请了数十位自动驾驶领域嘉宾,都是活跃在一线产业界和工业界的大佬(经常出现的顶会和各类访谈中哦)。欢迎随时提问,他们将会为大家答疑解惑。除了上面的问题,我们还为大家梳理了很多其它的内容:
端到端自动驾驶如何入门?一段式/二段式量产中如何使用?
传统规划控制想转端到端VLA,求学习路线图!
自动驾驶多模态大模型预训练数据集有哪些?求自动驾驶VLA微调数据集?
多传感器融合现在还适合就业吗?
3DGS和闭环仿真如何结合?应用中需要考虑哪些元素?
世界模型是个啥?业内如何应用,研究还有切入点么?
业内哪家公司前景好一些,适合跳槽,都有什么岗位开放招聘?求星主内推~
博士入学,哪个方向容易出成果?
闭环强化学习如何入门?
端到端自动驾驶学习路线推荐。
......
我们会不定期和一线的学术界&工业界大佬畅聊自动驾驶发展趋势,探讨技术走向和量产痛点:

针对入门者,我们整理了完备的小白入门技术栈和全栈路线图。
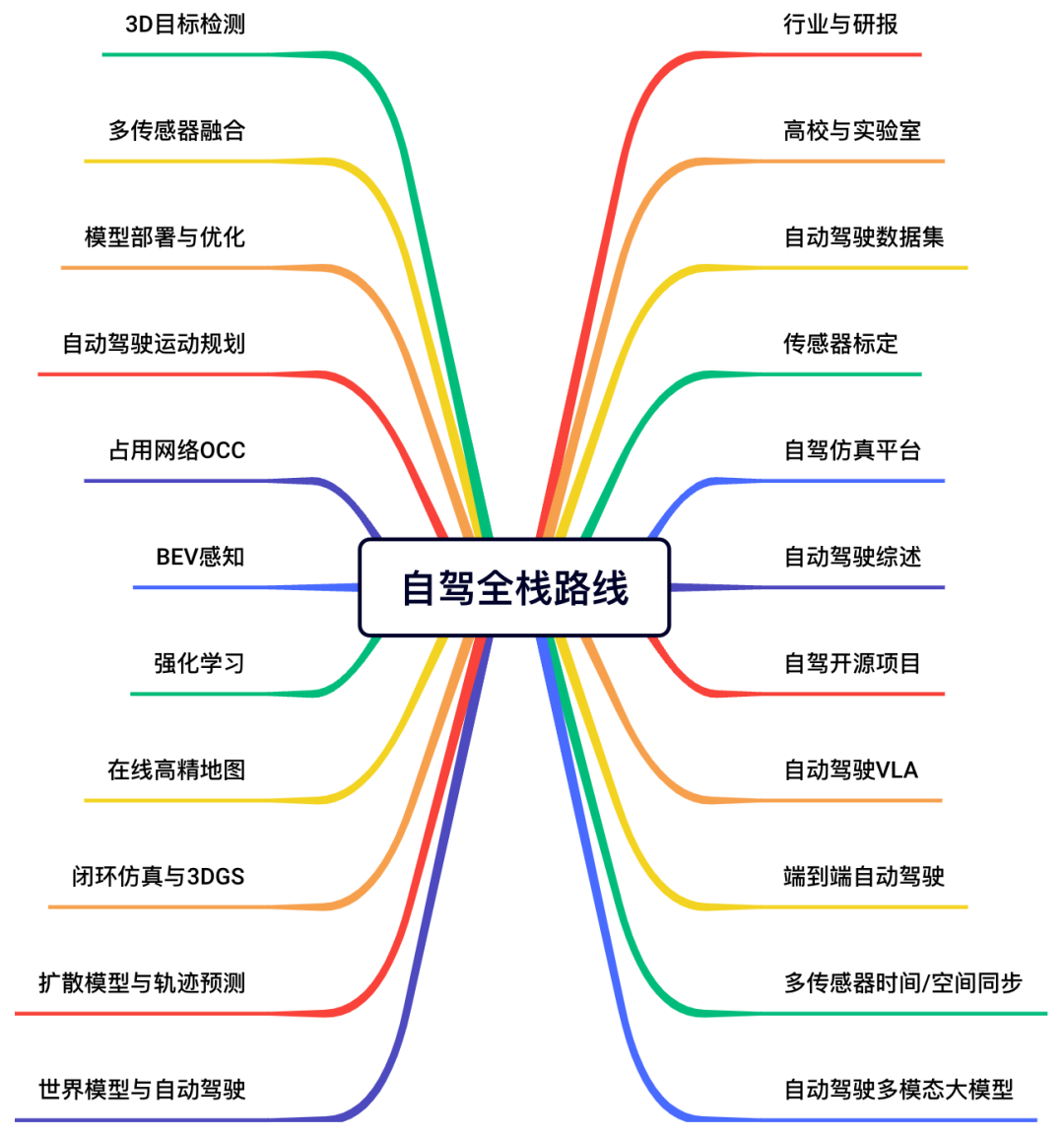
国内首个自驾全栈社区:自动驾驶之心知识星球
社区创建的出发点是给大家提供一个自动驾驶相关的技术交流平台,交流学术和工程上的问题。星球内部的成员来自国内外知名高校实验室、自动驾驶相关的头部公司,其中高校和科研机构包括但不限于:上海交大、北京大学、CMU、清华大学、西湖大学、上海人工智能实验室、港科大、港大、南洋理工、新加坡国立、ETH、南京大学、华中科技大学、ETH等等!公司包括但不限于:蔚小理、地平线、华为、大疆、广汽、上汽、博世、轻舟智航、斑马智行、小米汽车、英伟达、Momenta、百度等等。前沿技术聚集地一直是自动驾驶之心的标签!
我们为大家汇总了近40+开源项目、近60+自动驾驶相关数据集、行业主流自驾仿真平台、以及各类技术学习路线,包括但不限于:
自动驾驶感知学习路线 | 自动驾驶仿真学习路线 | 自动驾驶规划控制学习路线 |
|---|---|---|
端到端学习路线 | 3DGS算法原理 | 基于搜索的规划 |
VLA学习路线 | NeRF原理 | 基于采样的规划 |
多模态大模型 | Carla仿真 | 基于车辆运动学的规划 |
占用网络 | Apollo仿真 | 基于数值优化的规划 |
BEV感知 | Autoware仿真 | 横纵解耦规划框架 |
扩散模型 | 联合仿真 | 横纵联合规划框架 |
世界模型 | 自驾仿真产品架构分析 | 基于几何的路径跟踪 |
多传感器融合 | 闭环仿真 | 模型预测控制 |
轨迹预测 | 相关数据集 | 联合预测 |
...... | ...... | ...... |
星球内容一览
星球内容一览!
欢迎加入自动驾驶之心知识星球,与4000名自动驾驶从业人员&学术大佬一同交流。


















 1164
1164

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









