



作者 | 自动驾驶专栏 编辑 | 自动驾驶专栏
点击下方卡片,关注“自动驾驶之心”公众号
>>点击进入→自动驾驶之心『扩散模型』技术交流群
本文只做学术分享,如有侵权,联系删文
论文链接:https://arxiv.org/pdf/2503.22496
项目主页:https://princeton-computational-imaging.github.io/scenario-dreamer/

摘要

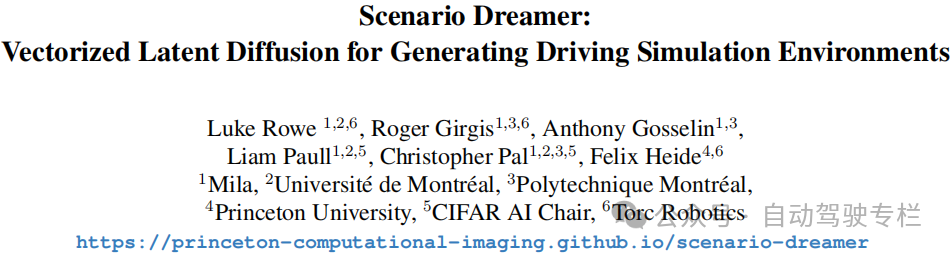
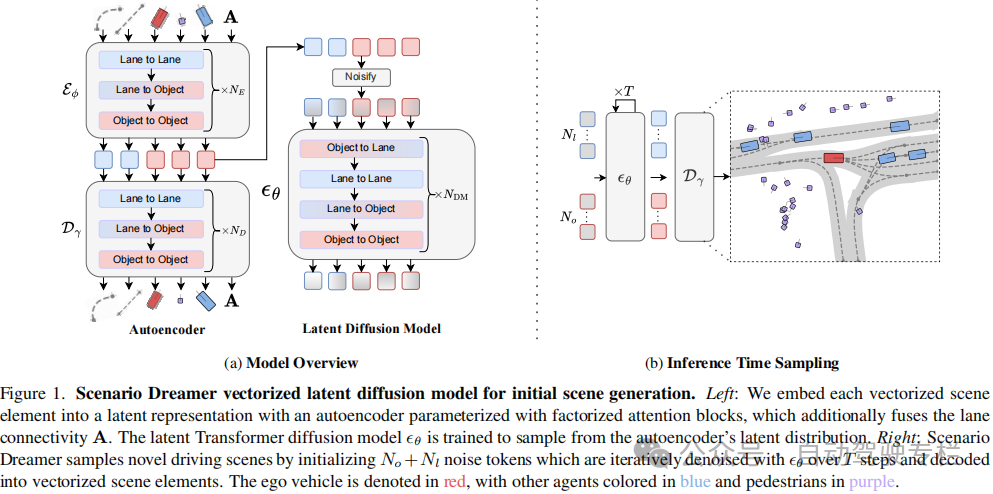
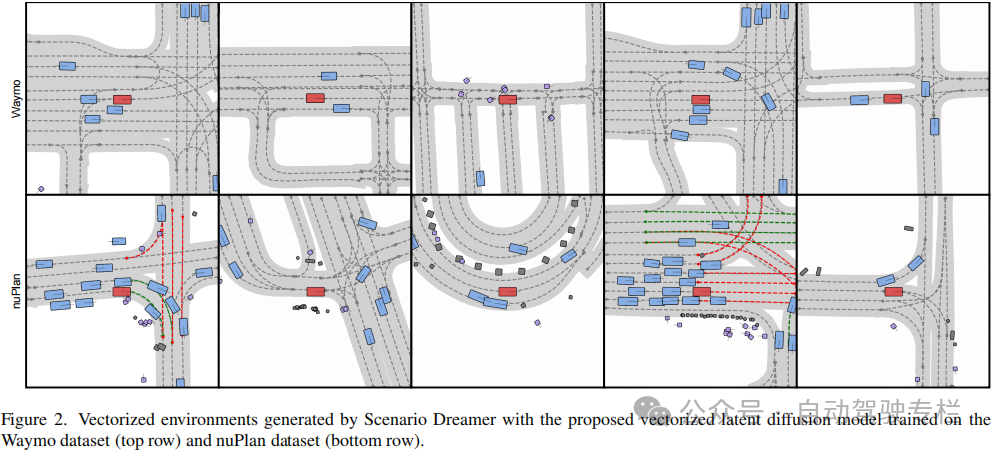
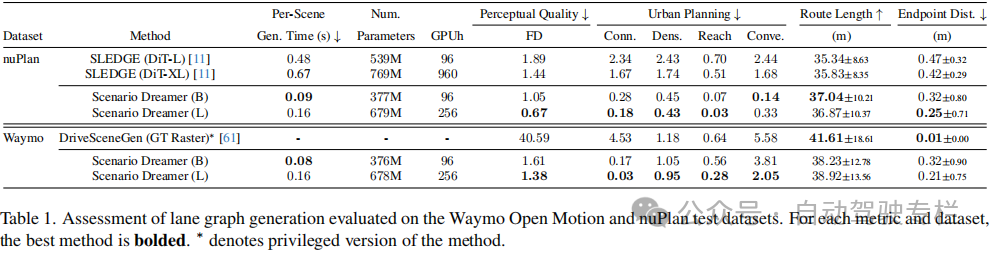
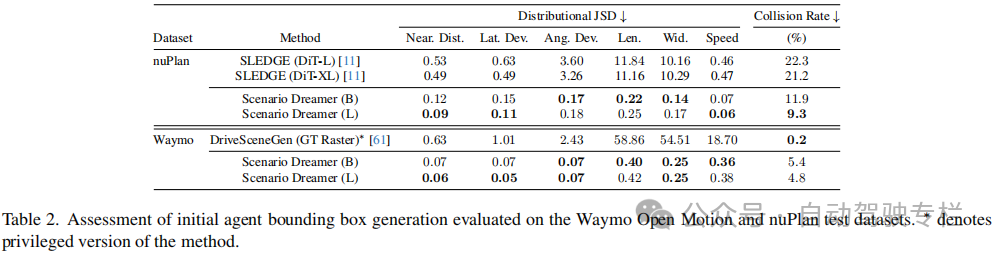
本文介绍了Scenario Dreamer:用于生成驾驶仿真环境的矢量化潜在扩散。本文引入了Scenario Dreamer,这是一种完全数据驱动的生成仿真器,用于自动驾驶汽车规划,它生成了初始交通场景(包含车道图和智能体边界框)和闭环智能体行为。生成驾驶仿真环境的现有方法将初始交通场景编码为栅格化图像,这需要参数庞大的网络,由于栅格化场景中存在很多空像素,因此该网络会执行不必要的计算。此外,本文发现,采用基于规则的智能体行为的现有方法缺乏多样性和真实性。因此,Scenario Dreamer采用一种新的矢量化潜在扩散模型来生成初始场景,它直接对矢量化场景元素进行操作,并且采用一种自回归Transformer进行数据驱动的智能体行为仿真。Scenario Dreamer还支持通过diffusion inpainting进行场景外推,从而生成无界的仿真环境。大量实验表明,Scenario Dreamer在真实性和效率方面优于现有的生成仿真器:矢量化场景生成基础模型实现了更优的生成质量,与最强大的基线相比,参数减少了大约2倍,生成延迟降低了6倍,GPU训练时间缩短了10倍。本文通过实验表明强化学习规划智能体在Scenario Dreamer环境中比传统的非生成仿真环境更具挑战性,从而证实了其实用性。

主要贡献

本文的贡献总结如下:
1)本文引入了Scenario Dreamer,这是一种用于自动驾驶规划的完全数据驱动生成仿真器。Scenario Dreamer的核心是一种用于初始场景生成的新型矢量化潜在扩散模型,相比于先前使用栅格化场景编码的方法,该扩散模型具有实际优势;
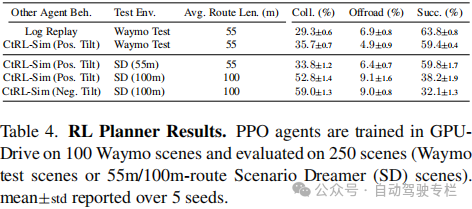
2)本文表明,Scenario Dreamer环境对强化学习规划器具有挑战性,特别是长时间和对抗性驾驶环境。

论文图片和表格



总结

本文提出了Scenario Dreamer,这是一种完全数据驱动的生成仿真器,用于自动驾驶规划器。Scenario Dreamer的核心包括一个初始场景生成器和一个返回条件的多智能体Transformer行为模型。本项工作的一个关键创新之处为矢量化潜在扩散模型,与栅格化场景编码方法相比,它能够实现高效且有效的场景生成。本文希望,Scenario Dreamer能够成为自动驾驶研发中完全数据驱动的生成仿真器的研究基础。
局限性:本文发现,车道的交通灯信号并不总是提供有效的交通逻辑。此外,Scenario Dreamer目前仅生成中心线地图。未来,将计划生成其它道路元素类型(例如路缘、人行横道)。
自动驾驶之心
论文辅导来啦

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 1496
1496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









