



>>直播和内容获取转到→自动驾驶之心知识星球
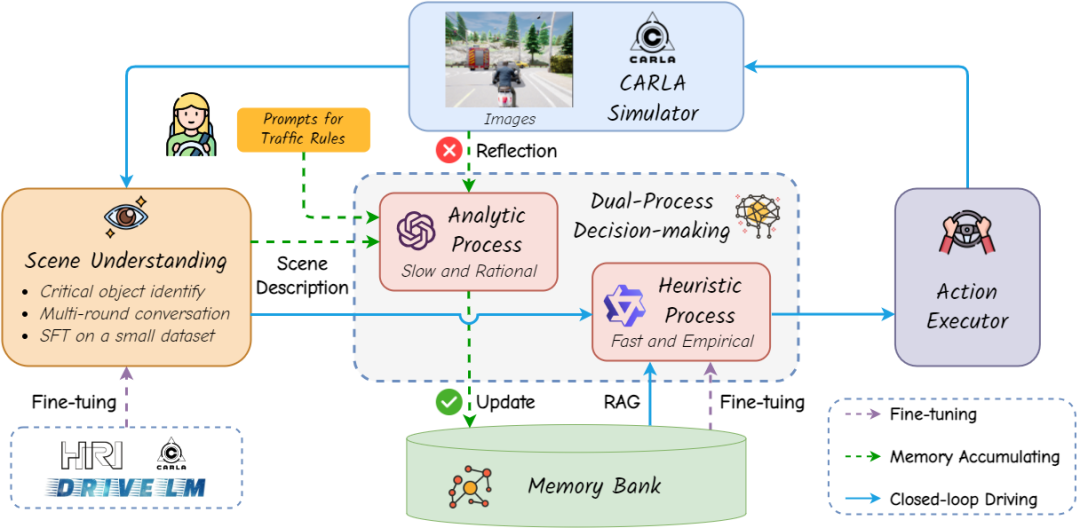
由于传感器、机器学习和人工智能的发展,自动驾驶技术得到了长足的进步。然而主流方法难以应对复杂的场景和因果关系,阻碍了在不同环境中的适应性和可解释性。为了解决上述问题,浙大和上海AI Lab提出了LeapAD,这是一种受人类认知过程启发的自动驾驶新范式。具体来说,LeapAD通过选择与驾驶决策相关的关键目标来模拟人类注意力,简化环境解释,并降低决策复杂性。此外,LeapAD还包含了一个创新的双过程决策模块,该模块由一个用于全面分析和推理的分析过程(系统II)和一个用于快速和实证处理的启发式过程(系统I)组成。分析过程利用其逻辑推理来积累语言驱动经验,然后通过监督微调将其转移到启发式过程中。通过反馈机制和不断增长的记忆库,LeapAD在闭环环境中不断从过去的错误中改进自己。CARLA中的闭环测试表明,LeapAD优于仅依赖相机输入的所有方法,需要的标注数据减少了1-2个数量级。实验还表明,随着记忆库的扩展,只有1.8B参数的启发式过程可以继承GPT-4驱动的分析过程的知识,并实现持续的性能改进。
今天自动驾驶之心很荣幸邀请到文章一作梅剑标:浙江大学在读博士生、上海AI Lab见习研究员。为大家分享这篇NeurIPS 2024中稿的最新工作。录播视频及相关资料会在第一时间上传至『自动驾驶之心知识星球』~
论文链接:https://arxiv.org/abs/2405.15324
项目主页:https://pjlab-adg.github.io/LeapAD/

国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

【自动驾驶之心】技术交流群
自动驾驶之心是国内领先的技术交流平台,关注自动驾驶前沿技术与行业、职场成长等。我们成立了一系列的技术交流群,涉及:语义分割、车道线检测、2D/3D目标跟踪、2D/3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、在线地图、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、Gaussian Splatting、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等多个方向!
备注:学校/公司+方向+昵称(快速入群方式)

点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









