



作者 | BrianLee 编辑 | 自动驾驶之心
原文链接:https://zhuanlan.zhihu.com/p/546531693
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
一面
基础
虚拟内存相关详细讲一下
讲讲左值和右值
什么时候使用右值
完美转发
假如 a 是 T 的左值引用,T 是 int&& 类型的,那么 a 实际上是什么
讲一下智能指针
shared_ptr 和 unique_ptr 区别,以及性能对比
weak_ptr 及其作用
shared_ptr 是线程安全的吗
lambda 表达式有哪些捕获类型
讲讲多态及实现机制
虚基类
多继承的时候,虚函数表指针怎么存using std::cin 和 在
using namespace std 后使用cin有什么区别
元编程
项目
详细介绍
MSRA实习项目
对交易预测输入和输出需要存储,这个空间消耗大概多大
思考题
一个有环链表,两个速度不一样的指针移动,起始位置也不一定一样,它们一定相遇吗
Coding
数据中最小的k个数
class Solution {
private:
int randInRange(int l, int r) {
srand(time(0));
return rand() % (r - l + 1) + l;
}
int partition(vector<int> &input, int l, int r) {
if (l >= r) return l;
int idx = randInRange(l, r);
swap(input[idx], input[r]);
int large = l - 1;
for (int i = l; i < r; ++ i) {
if (input[i] < input[r])
swap(input[++ large], input[i]);
}
swap(input[++ large], input[r]);
return large;
}
public:
vector<int> GetLeastNumbers_Solution(vector<int> input, int k) {
int n = input.size();
int l = 0, r = n - 1;
vector<int> res;
while (l <= r) {
int idx = partition(input, l, r);
if (idx + 1 == k) {
res.assign(input.begin(), input.begin() + k);
return res;
} else if (idx + 1 < k)
l = idx + 1;
else
r = idx - 1;
}
return res;
}
};二面
基础
首先介绍了自动驾驶系统涉及的研发方向,问我对哪个感兴趣
自我介绍
发现性能瓶颈使用过什么方法
如何发现死锁
在开发时制定什么样的规则可以避免死锁
如何调试内存泄露
如何调试 core dump
虚拟内存介绍
每个进程的虚拟内存有多大
如果物理内存大于 4G,可以不使用虚拟内存吗(安全性)
线程切换要进入内核态吗
一个很大的二维数组存在内存中,是按行读取快还是按列读取快(CPU cache,局部性原理)
map 和 unordered_map区别
unordered_map 使用什么方法解决 hash 冲突
Coding
LRU,要求自己实现双向链表
#include <bits/stdc++.h>
using namespace std;
struct Node {
int key;
int value;
Node *left;
Node *right;
Node(int k, int v): key(k), value(v) {
left = nullptr;
right = nullptr;
}
Node(int k, int v, Node *l, Node *r): key(k), value(v), left(l), right(r) {}
};
struct BiList {
Node *head;
Node *tail;
BiList() {
head = new Node(0, 0);
tail = head;
}
void insert_front(Node *node) {
auto first = head->right;
node->right = first;
head->right = node;
node->left = head;
if (first) {
first->left = node;
}
if (tail == head)
tail = head->right;
}
pair<int, int> erase_end() {
if (tail == head)
return {-1, -1};
Node *tmp = tail;
tmp->left->right = nullptr;
tail = tmp->left;
int key = tmp->key, val = tmp->value;
delete tmp;
return {key, val};
}
void erase(Node *node) {
if (node == tail)
tail = node->left;
auto left = node->left;
auto right = node->right;
left->right = right;
if (right)
right->left = left;
delete node;
}
Node *first() {
return head->right;
}
~BiList() {
Node *ptr = head;
while (ptr) {
Node *tmp = ptr->right;
delete ptr;
ptr = tmp;
}
}
};
class LRUcache {
private:
int cap;
BiList *lst;
unordered_map<int, Node*> mp;
public:
LRUcache(int k): cap(k) {
lst = new BiList();
}
void set(int key, int value) {
if (mp.find(key) == mp.end()) {
if (mp.size() == cap) { //evict
auto p = lst->erase_end();
int rm_key = p.first;
mp.erase(rm_key);
}
} else {
auto node = mp[key];
lst->erase(node);
}
lst->insert_front(new Node(key, value));
mp[key] = lst->first();
}
int get(int key) {
if (mp.find(key) == mp.end())
return -1;
auto node = mp[key];
int value = node->value;
lst->erase(node);
lst->insert_front(new Node(key, value));
mp[key] = lst->first();
return value;
}
~LRUcache() {
delete lst;
}
};
int main() {
int n, k;
cin >> n >> k;
LRUcache cache(k);
vector<int> res;
for (int i = 0; i < n; ++ i) {
int opt;
cin >> opt;
if (opt == 1) {
int x, y;
cin >> x >> y;
cache.set(x, y);
} else {
int x;
cin >> x;
res.push_back(cache.get(x));
}
}
for (int num : res)
cout << num << " ";
return 0;
}总结
LRU 出现频率真的好高。。
拼团钜惠立减100!

学习C++的难点和解决方案
尽管C++在自动驾驶行业中应用广泛,但许多学习者在学习C++时往往面临各种挑战。从语法规则到高级应用,如何快速掌握C++的关键知识点和思维方式,是每个C++初学者都会遇到的难题。如果还需要同时学习自动驾驶相关模块算法的知识,就更让初学者感到畏惧和艰难。
虽然很多人在学校里有机会学习C++,但学校的课程质量令人不敢恭维:
学校的C++编程课程过于注重语法知识的学习,而较少关注实际编码,导致学生对概念一知半解,一动手就迷糊;
C++涉及面广,而学校的教学时间有限,所以学习往往碎片化,重要知识点无法系统地学习;
学校老师大多没有实际项目开发经验,很难将C++应用场景和实际工作需求结合,和自动驾驶结合就更加稀少;
许多学校还在使用着陈旧的教材与开发工具,往往落后实际应用一二十年,大量C++新特性没有涉及。
此外,网络上的C++课程汗牛充栋,良莠不齐。而且这些课程都更专注于C++本身的语法和特性,一般是面向通用领域,没有结合特定领域而展开,或者以互联网后端服务为主。相比之下,自动驾驶行业对C++有非常独特的需求,比如自动驾驶核心算法不需要考虑多机冗余和高并发, 而是涉及大量的数学运算、矩阵操作、图像处理等,需要利用C++进行高效的底层实现;自动驾驶还需要考虑系统架构、并发、硬件访问等问题,这需要工程化的C++编程思维。因此,虽然已经有大量C++课程,但依然缺乏面向自动驾驶领域、具备实战案例的C++课程。
自动驾驶之心通过与行业内多名资深C++工程师交流,结合学习的难点和痛点,推出了首个面向自动驾驶与具身智能量产级的C++编程课程。本课程将帮助学习者克服这些难题,通过丰富的自动驾驶实例和项目实践,让C++变得更为亲近和易学。本课程会秉承“以终为始”的概念,所有案例均来源于自动驾驶行业,以丰富的自动驾驶项目案例,生动地讲解C++的概念和语法,使学员快速把握C++精髓。还将分享资深算法大咖的实战经验和工作感悟,帮助学员更加游刃有余地应对工作中的问题和规划自己的未来。
在一期大获成功的同时,我们也在思考,哪些需要改进,只有根据反馈自我革新,才能永葆生命力和竞争力。团队和朝峰老师进行了深入探讨,结合一期学员的疑问和反馈,决定对大纲进行全面优化,增加一些实际开发中需要用到的细节东西(常用工具库的细节、资源管理更深入细节、实战项目的增加等等),将很多高级部分进行了升级和细化,让刚入门自动驾驶和机器人领的小伙伴能循序渐进的学习,让有基础的同学更好的进阶,工作中游刃有余。
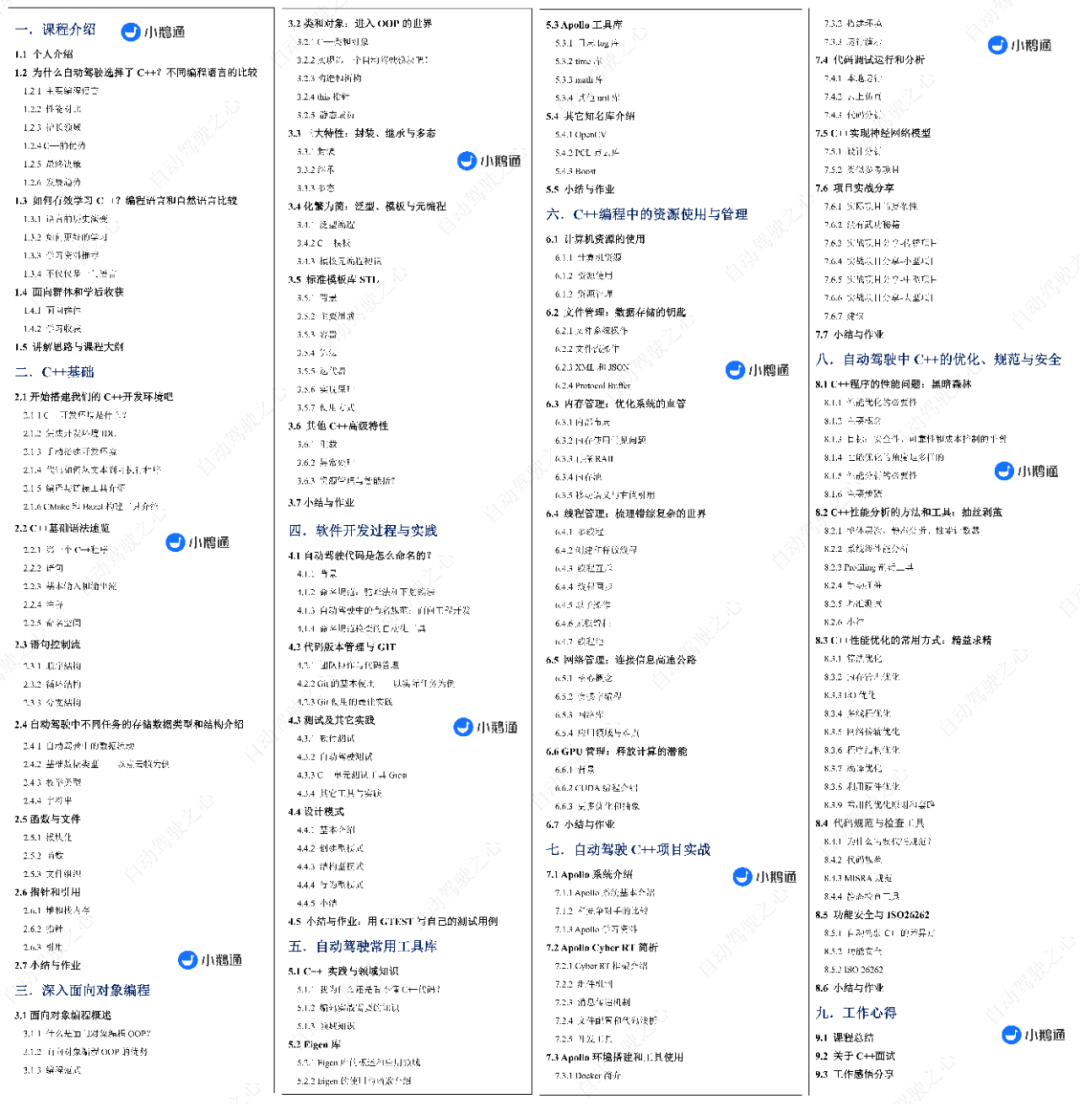
二期新大纲
下面是vip群内的日常答疑,干货满满!
 拼团钜惠立减100!
拼团钜惠立减100!


















 4501
4501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









