 PanoOcc算法直播课助力自动驾驶论文
PanoOcc算法直播课助力自动驾驶论文




在自动驾驶中,全面的三维场景理解至关重要。现有的感知任务,比如目标检测、道路结构分割、深度和高度估计以及开放式对象定位,都只关注于整体三维场景理解任务的一小部分。虽策略简化了算法开发过程,但代价是失去了问题的端到端统一解。新的方法PanoOcc在nuScenes数据集上实现了基于摄像机的语义分割和全景分割的最新结果,同时可以很容易地扩展到密集的占用率预测,并在Occ3D基准显示了良好的性能!
准确感知环境、识别和分类物体,并将它们在场景的三维空间中进行位置上下文化的能力对于开发安全可靠的自动驾驶系统是基础性的。为了让大家掌握PanoOcc框架,研梦非凡中科院研究所周导师为大家制作《PanoOcc:基于相机的3D全景分割最新SOTA》(前沿论文直播课NO.78节), 从3D目标检测、向量地图重建、3D语义场景补全、3D分割等研究背景,到PanoOcc算法整体架构的详细讲解。让你了解掌握学有所用!
扫码免费预约直播课

众所周知写论文先调研相关工作,找相关论文来读是调研的第一步!我还为大家准备了40+篇3D全景分割相关论文➕24个Occ工作代码+数据集+论文➕还有102篇VLM论文➕34篇端到端论文。预约直播即可领取。
PanoOcc直播课程大纲
论文核心要点
对周围3D世界的全面建模
端到端统一解决方案
基于摄像机的 3D 全景分割
PanoOcc新方法
研究背景(创新点)
1.BEV在3D场景理解中的发展和应用
3D目标检测(BEVFormer的整体架构)
向量地图重建(MapTR 的整体架构)
2.OCC在3D场景理解中的发展和应用
3D语义场景补全(MonoScene 框架)
3D分割(VoxFormer 的整体框架)
3.创新点讲解
相关工作
基于视觉的3D感知
LSS
DETR3D
3D占据预测
TVPFormer
MonoScene
LiDAR全景分割
Panoptic-PolarNet
GP-S3Net
3D场景重建和表示
SfM
3D DeepVoxels
扫码免费预约直播课

预约直播即可领取40+篇3D全景分割相关论文➕24个Occ工作代码+数据集+论文➕还有102篇VLM论文➕34篇端到端论文。
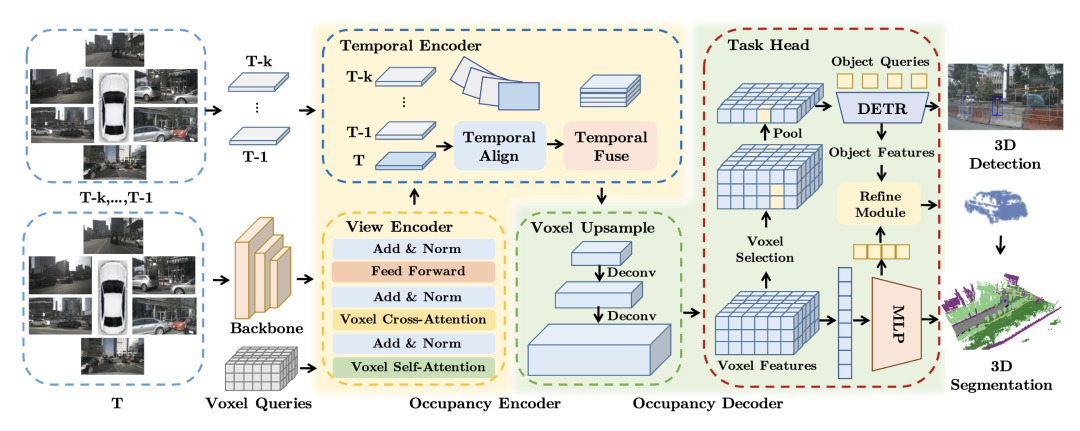
算法框架
DSCA-Net算法框架
体素query
占据编码器
占据解码器
实验数据集和指标
nuScenes 数据集
Occ3D-nuScenes
实验设定
与其他方法的比较
DSCA-Net消融实验的比较
定量分析结果
算法应用及融合
扫码免费预约直播课

众所周知写论文先调研相关工作,找相关论文来读是调研的第一步!我还为大家准备了40+篇3D全景分割相关论文➕24个Occ工作代码+数据集+论文➕还有102篇VLM论文➕34篇端到端论文。预约直播即可领取。
ps:研梦非凡开设的前沿论文系列直播,旨在帮助大家提升读论文技能,快速抓住重点,掌握有效方法,进而找到创新点,轻松完成论文工作。(文末更多福利!)
研梦非凡科研论文指导服务
如何快速找到idea,如何正确的选择模型,怎么避免与其他工作重复, 什么样的实验计划省时效果显著,一边实验一边出论文初稿技能,针对不同的期刊会议绘图方法,终稿完善,投稿策略,期刊/会议选择,response,直到accpet!研梦非凡全程陪伴你产出科研成果!
<<< 左右滑动见更多 >>>
如果你需要发CCF A会-C会、SCI一区-四区、EI会议/EI期刊、毕业大论文、毕业设计等,都可以来研梦非凡匹配合适的论文指导服务。
可辅导的自动驾驶方向
<<< 左右滑动见更多 >>>
扫码加助教匹配合适方向的辅导
研梦非凡导师团队
研梦非凡的导师来自海外QStop50、国内华五、C9、985高校的教授/博士导师/博士后,世界500强公司算法工程师,以及国内外知名人工智能实验室研究员。
这是一支实力强大的高学历导师团队,在计算机科学、机器学习、深度学习等领域,积累了丰富的科研经历,研究成果也发表在国际各大顶级会议和期刊上,在指导学员的过程中,全程秉持初心,坚持手把手个性化带教。包括但不限于以下导师~~
<<< 左右滑动见更多 >>>
扫码加助教为你匹配合适课题的大牛导师

我们不是小作坊哦~我们背靠研途考研(就是张雪峰老师和徐涛老师在的那个研途考研),做教育十余年,重交付,重口碑,是我们一贯的公司理念!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









