




点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
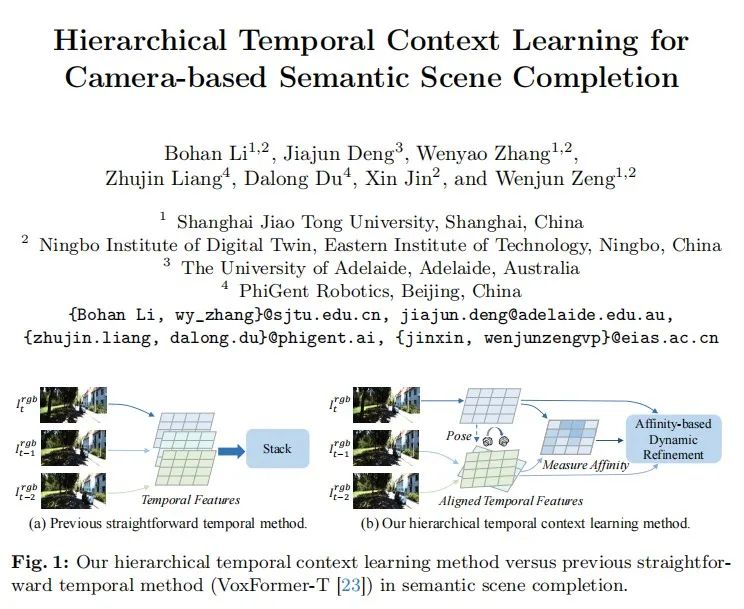
今天自动驾驶之心为大家分享ECCV2024最新的工作—HTCL!在SemanticKITTI基准测试中超过了所有基于相机的方法,甚至在和OpenOccupancy基准测试中超过了LiDAR!如果您有相关工作需要分享,请在文末联系我们!
自动驾驶课程学习与技术交流群事宜,也欢迎添加小助理微信AIDriver004做进一步咨询
论文作者 | Bohan Li等
编辑 | 自动驾驶之心
本文是对ECCV2024接受的文章 HTCL: 的介绍,HTCL在SemanticKITTI基准测试中超过了所有基于相机的方法,甚至在和OpenOccupancy基准测试中超过了LiDAR,实现了最先进的性能。代码已开源,欢迎大家试用和Star~
代码链接:https://github.com/Arlo0o/HTCL
论文链接:https://arxiv.org/abs/2407.02077
Demo video 展示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1247
1247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









