



自动驾驶突出的“长尾问题”,即那些在实际道路测试中难以遇到的罕见或异常驾驶情况。目前国内智能驾驶测试仍然以实车测试为主,成本高昂、效率底下,更重要的是无法全面覆盖所有潜在驾驶情境。尤其是端到端自动驾驶大趋势下,实车测试的单次成本可能高达上千上万元。另一方面,重建技术飞速发展,仿真闭环正在无限接近可能。越来越多的研发人员开始注重自动驾驶仿真技术。通过在控制的虚拟环境中模拟长尾场景,仿真技术不仅可以提供更全面的测试覆盖率,还能在安全的环境中加速算法的开发和验证,从而有效提高自动驾驶系统的整体性能和可靠性。
然而搭建一套自动驾驶闭环仿真测试系统是一项复杂而全面的工程任务。这不仅涉及到对场景构建、数据处理、传感器建模与感知、车辆动力学的理解,还需要掌握算法与仿真平台之间的中间件、仿真引擎以及前端开发技术。更重要的是,开发人员需要具备灵活的问题解决能力,能够在必要时通过开源算法弥补系统中的不足,确保整个系统的稳定运行。例如,如果被测对象仅是自动驾驶功能框架中的一部分,开发人员应能利用开源算法补全系统,实现闭环运作。因此,无人驾驶仿真评测开发人员需要具备广泛的技术知识,虽然不必精通每一种算法,但需要有广泛的知识覆盖面。这种综合性的技术理解和应用能力,是进入这一领域的关键。
怎么搭建自动驾驶仿真系统?
在探讨这一话题时,可能我们会感到很棘手。然而,随着自动驾驶技术的不断发展,以及前人在这一领域的技术探索,我们有幸能够站在前人的肩膀上,完成了上述任务。这其中,开源自动驾驶仿真平台Carla发挥了重要的作用。Carla提供了基础场景,如town小镇,它具备传感器建模与感知体系、车辆动力学模型以及基于Unreal出色的渲染效果,使仿真测试变得更加容易。此外,Carla还提供丰富的API接口,为开发者提供了便利。
另外,值得一提的是Carla与ROS桥接中间件的发行,它进一步简化了仿真闭环测试的实现过程,为我们提供了巨大的便利。此外,Autoware也为我们提供了一套模块化的开源自动驾驶技术全栈解决方案,包括传感器数据解析、感知、决策规划、控制等相关算法,以及前端交互界面的综合集成。这使得我们能够更轻松地应对各种挑战,实现所谓的“哪里不会点哪里”的能力,从而更好地完成自动驾驶闭环仿真评测的任务。
从零开始我们的学习吧!
其实自动驾驶之心很早就想制作一套仿真相关的课程,主要是想让大家从全局和工程的角度上真正理解自动驾驶测试和各类算法的适用场景,在真正理解量产上车之前一步到底在做啥,推动整个仿真行业的进步与发展。前面也和几位行业大佬做过深入沟通交流,最终选择了Carla/ROS/Autoware这类主流框架作为平台,对Carla、Carla-ros-bridge以及Autoware进行全面梳理,实现Carla-Autoware联合仿真正是此次课程的任务所在。
限时88折优惠!扫码学习课程
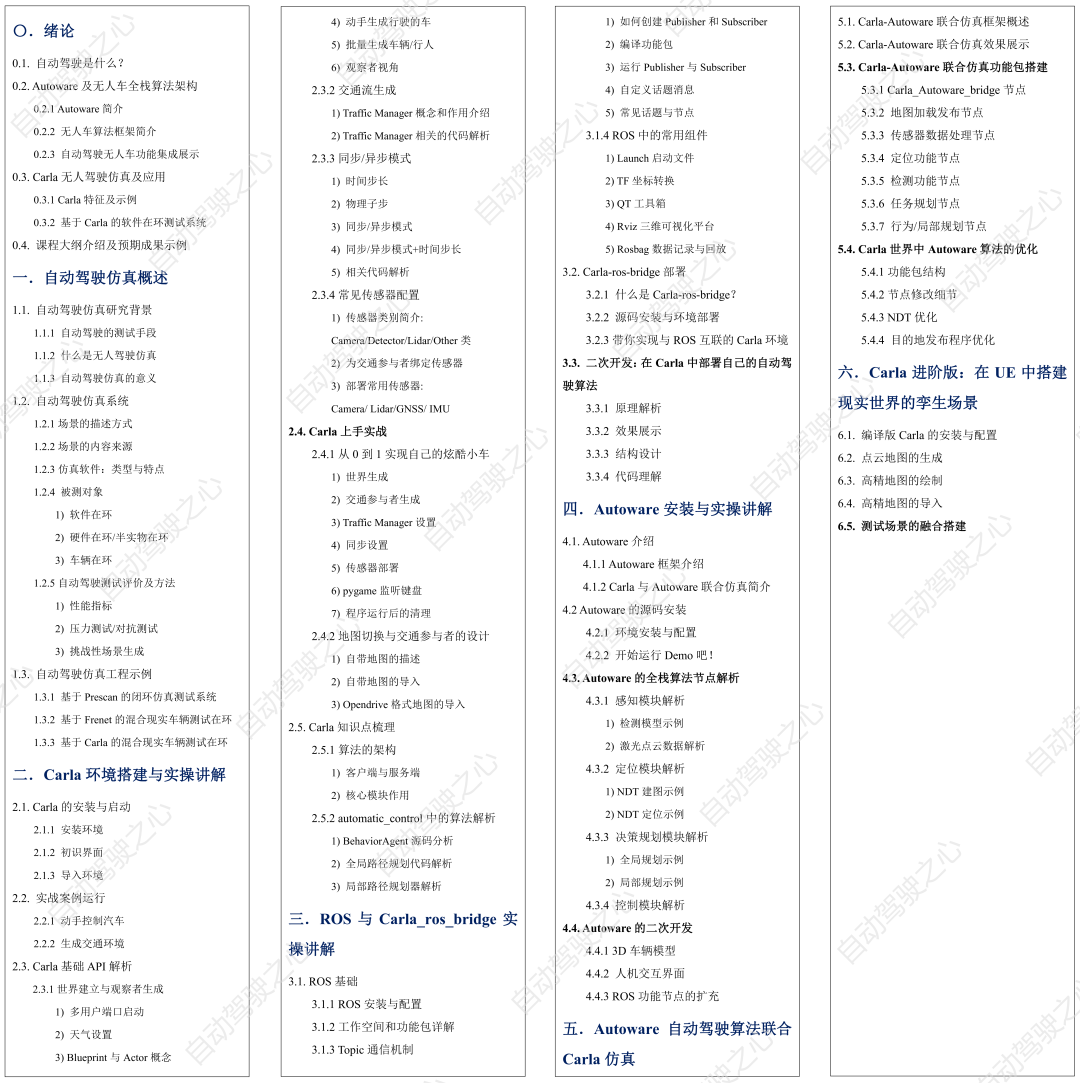
我们联合了业内知名仿真专家,从0到1为大家梳理,内容非常详细,是目前国内最系统最专业的自动驾驶仿真教程。刚入门的同学建议从头到尾按部就班学习,需要进阶的朋友可以到实战部分进修,大纲一览:
主讲老师
少铭,C9高校博士,无人驾驶领域搬砖多年,有过多次结合实车从0到1搭建整套自动驾驶算法经历,独自搭建过基于Prescan的软件在环仿真系统、基于Prescan的混合现实车辆在环测试系统、基于Carla的软件在环系统、基于Carla的混合现实车辆在环系统,以及曾获无人系统挑战赛两次全国第二名,两次全国第三名。
阿勇,C9高校在读博士,研究方向为自动驾驶轨迹预测和决策规划,参与过重大研发项目,有实车算法开发和调试的经历,曾获中国机器人大赛自动驾驶算法比赛国家一等奖,无人系统挑战赛两次全国第三名。
课程基础
一定基础的Python/C++编程,有Ubuntu系统使用经验;
电脑需要自带GPU,能够通过CUDA加速 (显存至少4GB) ,至少有8GB内存;
学后收获
学习如何搭建和配置仿真环境;
学会使用Carla和Autoware的基本架构和功能;
学习如何分析仿真结果,优化自动驾驶算法;
掌握使用Carla和Autoware进行自动驾驶仿真的技能;
完成本课程后,将能够独立使用Carla和Autoware进行自动驾驶仿真,具备独立设计和评估自动驾驶仿真实验的能力;
适合人群
自动驾驶领域的学生(本科/硕士/博士)和研究人员。
对Carla和Autoware感兴趣的开发者。
对自动驾驶闭环仿真测试有需求的专业人士。
教学方式
视频讲座与实操演示;
线上互动问答和讨论;
实际仿真项目实践;
课程特色
从0到1带着大家入门进阶仿真领域;
线上互动问答和讨论,面对面答疑解惑;
真正能把自动驾驶小车在指定场景运行,形成闭环;
面向工业级的仿真项目实践,可以作为工作求职使用;
良好的学习圈子与资料分享;
加入学习
限时88折优惠!扫码学习课程
添加小助理咨询更多


















 5426
5426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









