



 文章探讨了使用POMDP方法在具有不确定性的自动驾驶环境中进行规划,考虑了车辆间互动及目标车辆的不确定行为预测。通过贝叶斯推断更新目标车辆路径,实验展示了考虑不确定性如何改善决策,使轨迹接近于多种可能情况的结合,类似于contingencyplan策略。
文章探讨了使用POMDP方法在具有不确定性的自动驾驶环境中进行规划,考虑了车辆间互动及目标车辆的不确定行为预测。通过贝叶斯推断更新目标车辆路径,实验展示了考虑不确定性如何改善决策,使轨迹接近于多种可能情况的结合,类似于contingencyplan策略。
作者 | 论文推土机 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/654834086
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【规划控制】技术交流群
本文只做学术分享,如有侵权,联系删文
Automated Driving in Uncertain Environments: Planning with Interaction and Uncertain Maneuver Prediction,Constantin Hubmann1, Jens Schulz2, Marvin Becker3, Daniel Althoff4, and Christoph Stiller5。
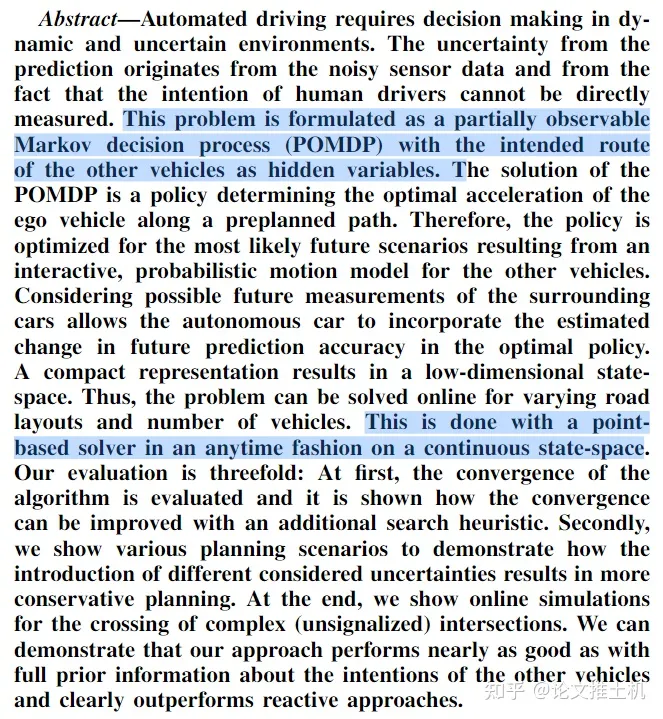
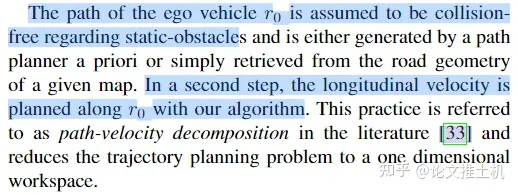
文章采用了pomdp的方式建模环境的不确定性问题,从而达到处理环境车辆意图和感知的不确定性。这里处理的环境主要是十字路口环境,决策是先固定了空间轨迹,然后进行纵向决策,体现在自动的速度变化上。是一种解耦的思路。这个文章还有一个更早的版本,不过内容是一样的,所以不必去看了,Decision making for autonomous driving considering interaction and uncertain prediction of surrounding vehicles。
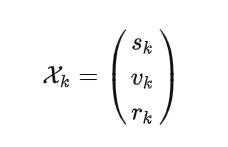
而对于目标车,由于其route是hidden variable, 是我们希望估计的东西,这个东西会通过后面的贝叶斯推断的方式进行更新,所以对于目标车,我们关注的状态中有一个route r, 此外由于后面是通过这个车的空间位置和车速进行贝叶斯推断的,所以观测空间中有位置和速度的信息,这里其他车的state包括:
离散空间的状态转移方程:

这里的加速度,通过heuristic的方式计算得到,这个值可以用数据训练获得,也可以用一些简单的规则的方式获得:


接下来是观测空间,这个观测上面说了,要用贝叶斯推断来更新概率,且用了空间位置和车速,所以这里的观测状态对于自己来说是:
而对于其他车辆则是:
对于观测函数来说,观测特征是:

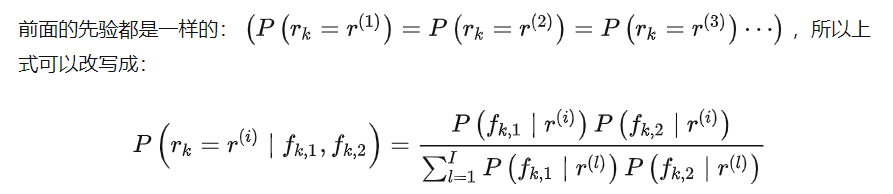
采用贝叶斯推断:

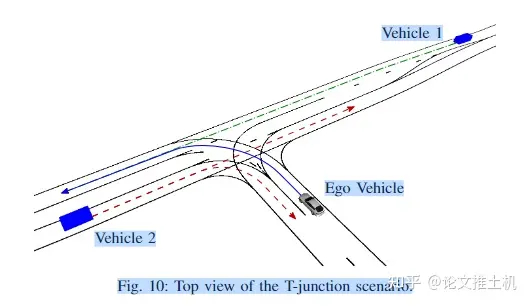
pomdp的求解采用了ABT算法,没有仔细研究过ABT, 这里就不多写了。下面可以看一下实验数据。一个是十字路口场景:
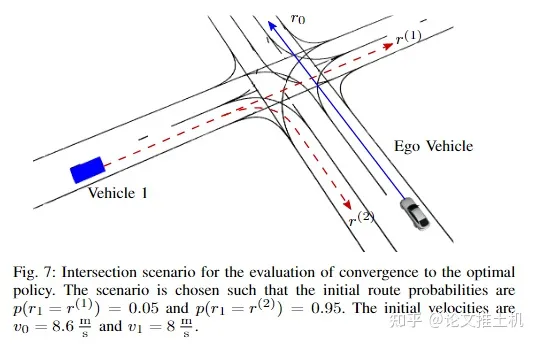
这目标车有可能直行,也有可能右转,所以存在一定与本车发生交互的可能性。
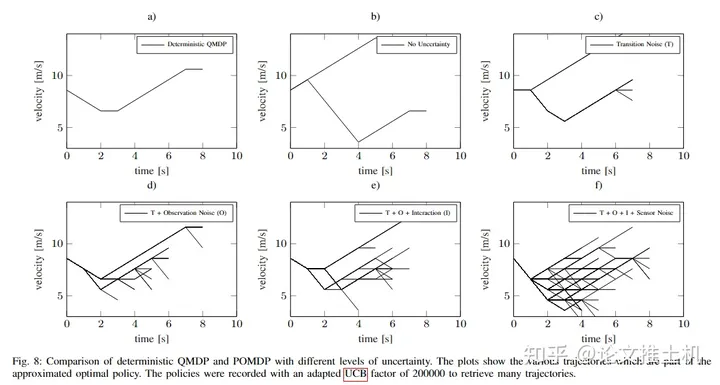
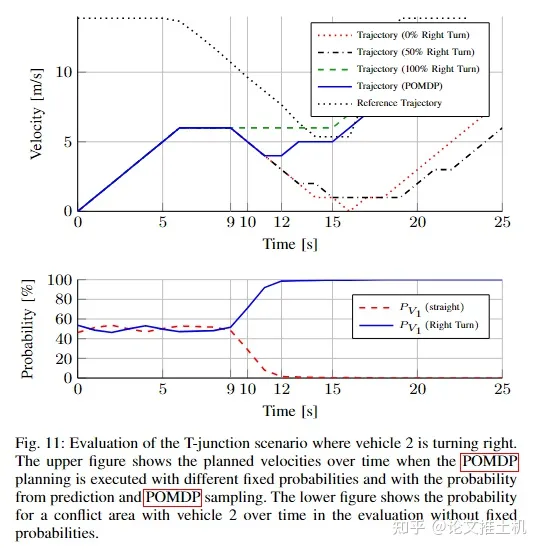
可以看到上图中的对比,如果只是采用不考虑不确定性的算法,我们会选择保守的策略,而考虑了不确定性之后,则会看到轨迹的车速并不会非常保守,这种特点非常像contingency plan出来的效果。往后看实验数据,在这个类似的场景中:
我们可以看到本车的车速,也就是下图中的蓝色线,首先在不确定目标意图的时候,在两车逼近到9s的时候发生了减速,然后随着目标意图的收敛,从直行变成了右转,不与本车发生交互,本车在接下来就开始加速。而在 v-t图中的对比可以看到,别的两种轨迹,分别是假设目标100%右转或者直行的情况下的本车轨迹,考虑不确定性的轨迹事实上是介于两者中间的,所以有一次非常像contingency plan的结果:
从s-t图上面可以看到类似的效果:
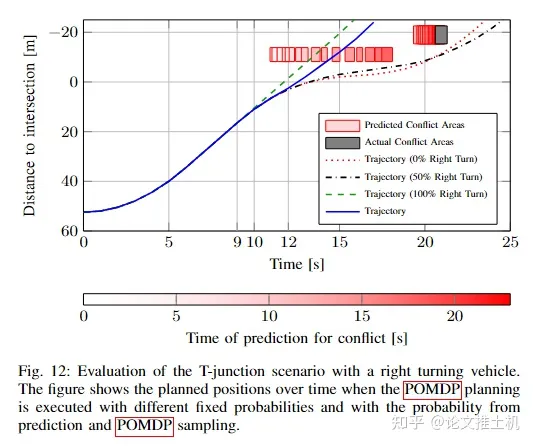
可以看到本车的蓝色线也是介于另外两种极端可能性之间的。考虑不确定性后可以将轨迹粘合在两种极端可能性之间,起到contingency的效果。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









