



作者 | 自动驾驶专栏 编辑 | 自动驾驶专栏
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【规划控制】技术交流群
后台回复【规划控制综述】获取自动驾驶、智能机器人规划控制最新综述论文!

论文链接:https://arxiv.org/pdf/2306.06987.pdf

摘要
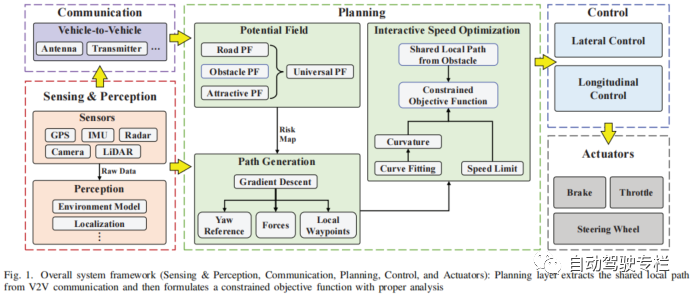
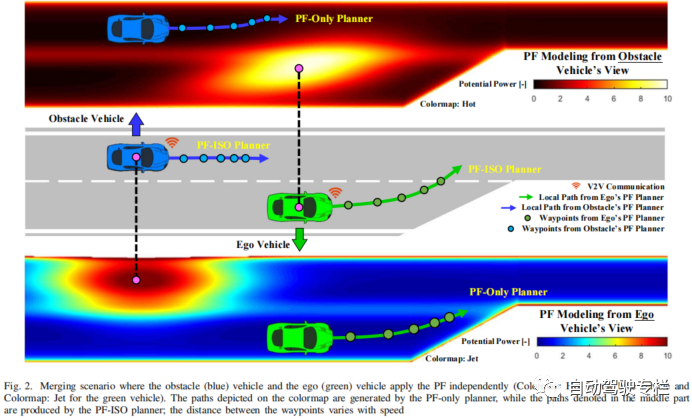
本文介绍了针对自动驾驶汽车(AVs)使用交互速度优化的基于势场的路径规划。路径规划对于自动驾驶汽车在考虑约束和目标的同时确定最优路线是至关重要的。势场(PF)方法由于其简单的结构和计算效率而在路径规划中变得普遍。然而,目前在自动驾驶汽车中使用的势场方法仅着重于自车的路径生成,同时假设周围的障碍物车辆在没有基于势场的路径规划器下以预先设定的行为驾驶,这忽略了自车的势场也可以影响障碍物车辆的路径生成。为了解决这个问题,本文提出了一种基于势场的路径规划方法,其通过车辆与车辆(V2V)之间的通信来共享自车和障碍物车辆之间的局部路径。然后,通过将这种共享的局部路径集成到目标函数中,设计了一种称为交互速度优化(ISO)的新优化函数,以确保自车和障碍物车辆的驾驶安全性和舒适性。在紧急并道场景中,通过与传统方法进行比较,使用MATLAB/Simulink对所提出的方法进行评估。仿真结果表明,所提出方法可以通过提前减速来缓解其它自动驾驶汽车的势场的影响,从而有效地减少自车和障碍物车辆的碰撞。

主要贡献
本文的主要贡献总结如下:
1)本文为两条车道合并为一条车道的并道场景引入一种分段的道路势能函数;
2)本文提出一种交互速度优化(ISO),其求解一个带约束的目标函数,该函数考虑了驾驶安全性、乘坐舒适性和来自其它相关自动驾驶汽车(AVs)的共享局部路径(SLP)。

论文图片和表格

总结
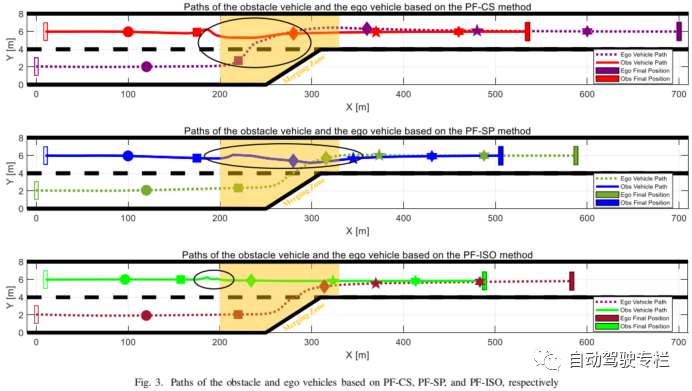
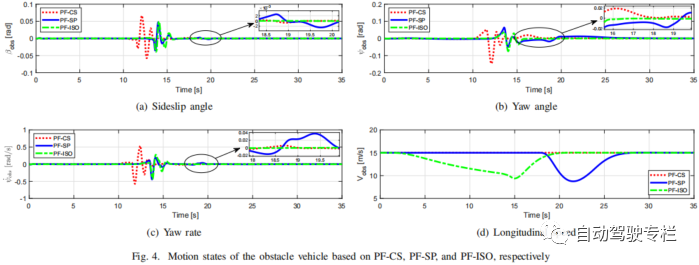
在本文中,我们引入了一种唯一的基于势场(PF)的路径规划方法,该方法通过V2V通信从其它自动驾驶汽车中获得共享局部路径(SLP)。我们考虑到道路上自动驾驶汽车的势场之间的交互,而不是假设仅自车使用基于势场的路径规划器。通过构建目标函数,我们通过将局部共享路径作为一个优化项来计算最优速度,该优化项也施加了合理的约束。仿真结果表明,所提出的PF-ISO方法可以降低自动驾驶汽车的侧滑角和航向角的振荡,并且在其它自动驾驶汽车势场的交互下,为障碍物车辆和自车提供更平滑的路径。在未来的工作中,我们将深入研究道路使用者的驾驶不确定性,包括行人、自行车等。此外,还将应用各种驾驶场景进行综合评估以及实车实验。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码免费学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、Occupancy、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

















 765
765

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









