



 深蓝学院推出自动驾驶线下实战特训营第二期,由多位一线算法专家研发,涵盖从仿真到实车验证全流程,帮助学员掌握自动驾驶关键技术。
深蓝学院推出自动驾驶线下实战特训营第二期,由多位一线算法专家研发,涵盖从仿真到实车验证全流程,帮助学员掌握自动驾驶关键技术。

自动驾驶是一个软硬件紧密结合的综合性工程系统。软件层面包括自动驾驶基础架构、传感器标定、感知、定位、规划控制、嵌入式开发、智能座舱等诸多技术,硬件层面包括电子电气架构设计、线控底盘等诸多方面。
通常一家自动驾驶的研发岗位多达30多种,涉及到多个学科。因此,当我们着手入门自动驾驶时,往往会有无从入手的感觉。站在自动驾驶从业者的角度,我建议大家:
第一步,先去了解自动驾驶的整个工作流程,弄明白所有技术模块之间是如何配合的,各模块的输入输出都是什么;
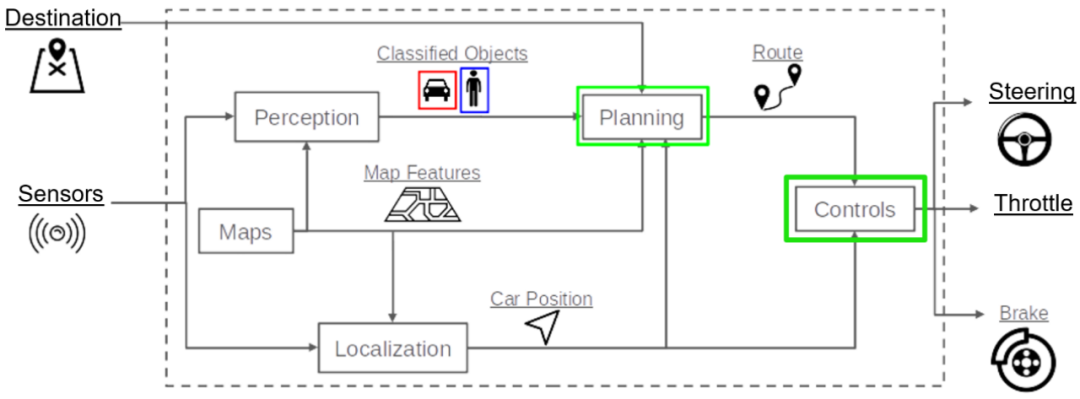
第二步,选择自己最感兴趣的技术模块,专精其中一个模块。
为了让大家快速熟悉自动驾驶全栈的技术,学习自动驾驶算法与底盘硬件是如何配合工作的,规划出专属于自己的驾驶学习之路,深蓝学院推出《自动驾驶线下实战特训营》第二期项目,该课程由10多位自动驾驶企业一线算法专家共同研发,历经4个月课程正式上线,正在限时优惠报名中!
(第一期课程实训剪影)
详情咨询请扫码添加客服
请务必备注【921】,优先通过哦!
01
实战特训营
特训营为期4天,为了保证学员的上课体验,本期特训营采用3人一组,每组一台车,每组一位专属助教全程辅导。小班教学模式,只招募27名学员。每天都会有企业一线的资深算法专家授课,并带领大家在真车上算法实践。
课程依托Apollo 6.0自动驾驶系统,同学们会在大咖老师的带领下,系统学习自动驾驶技术从仿真到实车验证(包括硬件装配),并在车辆上完成标定、融合感知、融合定位、规划控制等核心技术的调试与部署。希望通过课程的实训,让同学们快速熟悉自动驾驶整个技术栈。
02
课程讲师

高翔,定位算法总监
慕尼黑工业大学博士后,清华大学自动化系博士
《视觉SLAM十四讲:从理论到实践》作者。长期从事SLAM的研究,主要包括机器人的中的视觉SLAM技术、机器学习与SLAM的结合。在国际知名期刊IEEE Transactions on Mechatronics、Robotics and Autonomous Systems、Autonomous Robots等发表论文数篇。

任乾,原自动驾驶公司研发总监
从2011年起,开始进入惯性导航、多传感器融合定位领域,具有多种精度等级、多种配置、多种场景下的传感器融合定位系统成功研发经验。在IEEE Transactions on Industrial Electronics, Sensors and Actuators等SCI期刊上发表文章。

谢晓佳,高级算法工程师
浙江大学控制理论与控制工程硕士。
长期从事运动规划、 SLAM 与多传感器融合方向,《机器人学中的状态估计》译者。

慕翔,高级算法工程师
上海交通大学硕士
主要研究多传感器标定、多源融合等方向,具有八年的研究和实践经验,负责公司相关业务中涉及的标定、建图等工作。
03
核心项目展示
(Apollo与SVL的联合仿真) (激光雷达与惯导标定后生成的点云地图)
(激光雷达与惯导标定后生成的点云地图)
 (相机与激光雷达融合感知)
(相机与激光雷达融合感知)
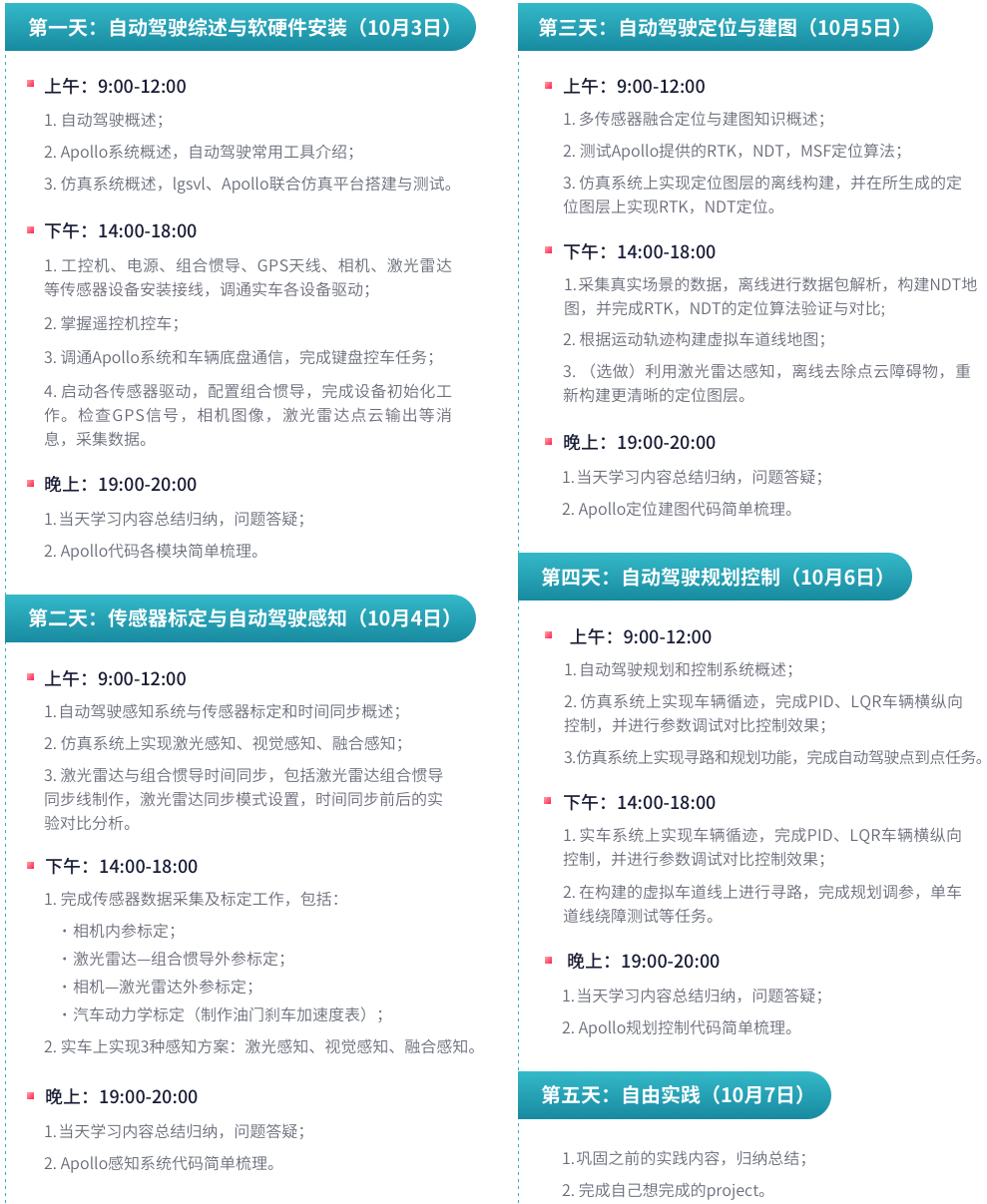
04
课程安排
05
课程配套
课程配套有课件、线下授课的录播视频,以及详细的实践手册。线下课程结束后,提供为期2个月的线上答疑服务,并且免费为大家提供2门线上课程。

(实践手册的目录)
【开课通知】
本课程为线下实践课程,拟定于2022年10月3日当天开课,仅限27人!
详情咨询请扫码添加客服
请务必备注【921】,优先通过哦!
扫码了解更多优惠

















 455
455

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









