 CANFD帧格式特点及设备功能介绍
CANFD帧格式特点及设备功能介绍




CANFD帧的帧格式相比于传统CAN帧的帧格式多了以下的不同的: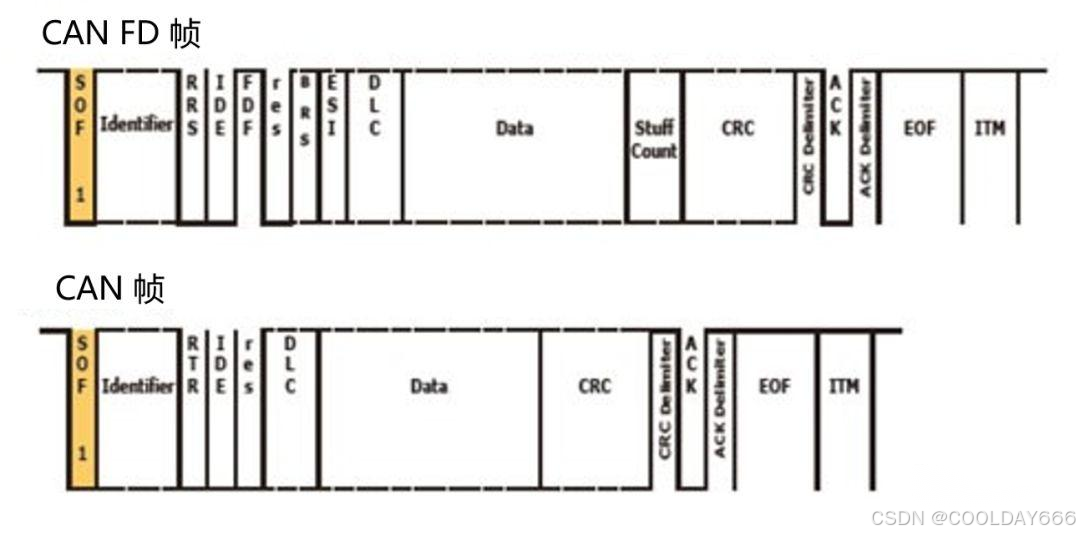
- CANFD帧中用RRS位替换了CAN帧中的RTR位,CAN报文中的RTR(Remote Transmission Request)位是远程帧发送请求位,当RTR位为显性(0)时,CAN帧为数据帧;当RTR位为隐性(1)时,CAN帧位远程帧。CANFD帧中的RRS(Remote Request Substitution)位为远程请求替换位,用来要替换CAN帧中的RTR位,在CANFD帧中常位显性,所以CANFD帧没有远程帧。
- CANFD帧中新增了FDF,BRS和ESI位:FDF(Flexible Data Rate Format)位为灵活数据格式位,用来区分CAN帧和CANFD帧,该位在CANFD帧中常为隐形(1)。BRS(Bit Rate Switch)位为位速率转换位,当BRS位为显性(0)位时,数据段的位速率和仲裁段的位速率一致(恒定速率);当BRS位为隐形位(1)时,数据段能够以高于仲裁段的位速率传输(从BRS位到CRC可以使用较高的速率传输)ESI(Error State Indicator)位为错误状态指示位,当ESI位为显性(0)时,表示节点处于主动错误状态;当ESI位为隐性(1)时,标识节点处于被动错误状态。
- CNAFD帧中多了四位的Stuff Count:Stuff Count由格雷码计算和奇偶校验两个元素组成:格雷码计算为CRC区域之前的填充位数除以8,得到的余数进行格雷码计算得到的值(Bit0-2),占三位;奇偶校验为通过格雷码计算后的值的奇偶校验,占一位。
 南金研的USBCANFD-422AC设备,可以通过南金研独立开发的上位机VBDSP打开,该设备配合上位机VBDSP可以实现对CAN总线上的数据进行监控和分析的功能。软件支持对总线上的CAN和CANFD数据进行统计和导入DBC文件对接收到的数据进行分析。除此之外,还可以以通过拨码开关更改设备内部运行的协议,来适配其他的上位机进行通讯。
南金研的USBCANFD-422AC设备,可以通过南金研独立开发的上位机VBDSP打开,该设备配合上位机VBDSP可以实现对CAN总线上的数据进行监控和分析的功能。软件支持对总线上的CAN和CANFD数据进行统计和导入DBC文件对接收到的数据进行分析。除此之外,还可以以通过拨码开关更改设备内部运行的协议,来适配其他的上位机进行通讯。


















 8629
8629

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









