 基于单片机的智能计步器设计
基于单片机的智能计步器设计




一、功能简介
项目名:计步器
项目编号:mcupark-dz-218
单片机类型:STC89C52
具体功能:
1、通过MPU6050陀螺仪进行计步
2、通过4位数码管显示步数
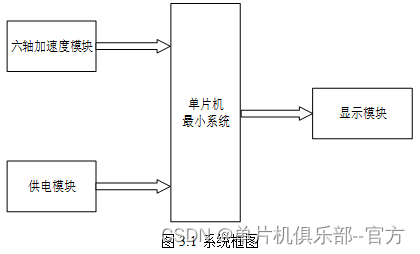
二、系统框图设计
本设计以单片机为核心控制器,加上其他模块一起组成此次设计计步器的整个系统,其中包括中控部分、输入部分和输出部分。中控部分采用了单片机控制器,其主要作用是获取输入部分的数据,经过内部处理,逻辑判断,最终控制输出部分。输入由两个部分组成,第一部分是六轴加速度模块,通过该模块检测当前用户的步数;第二部分是供电模块,通过该模块可给整个系统进行供电。输出通过数码管显示当前的步数。具体系统框图如图3.1所示。
三、软件流程设计
四、51实物图
单片机型号:STC89C52
板子为绿色PCB板,两层板,厚度1.2,上下覆铜接地。元器件基本上为插针式,个别降压芯片会使用贴片式。
供电接口:TYPE-C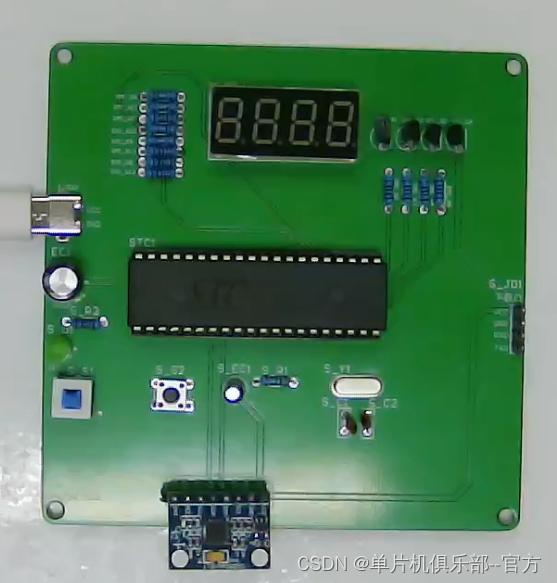
五、原理图
软件版本:AD2013
电路连线方式:网络标号连线方式
注意:原理图只是画出了模块的引脚图,而并不是模块的内部结构原理图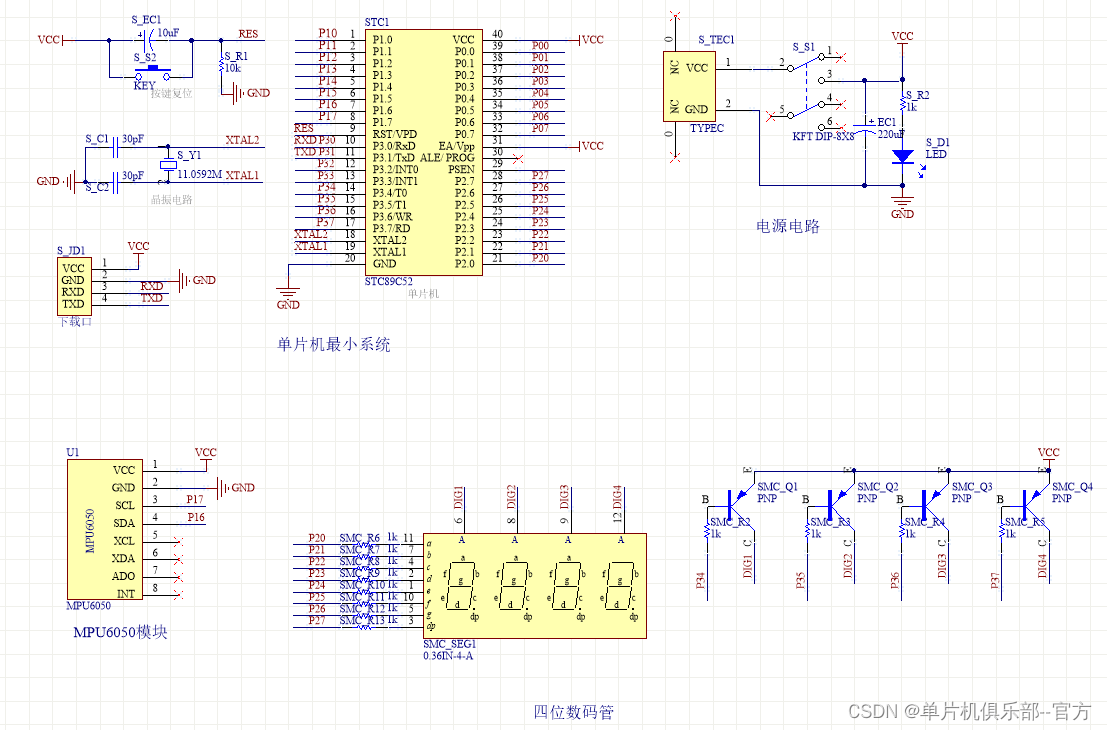
六、PCB图
由原理图导出,封装很大一部分都是作者自己绘制,不提供封装库,只提供连接好的源文件。中间有一个项目编号,隐藏在单片机底座下,插入单片机后不会看到。
两层板,上下覆铜接地。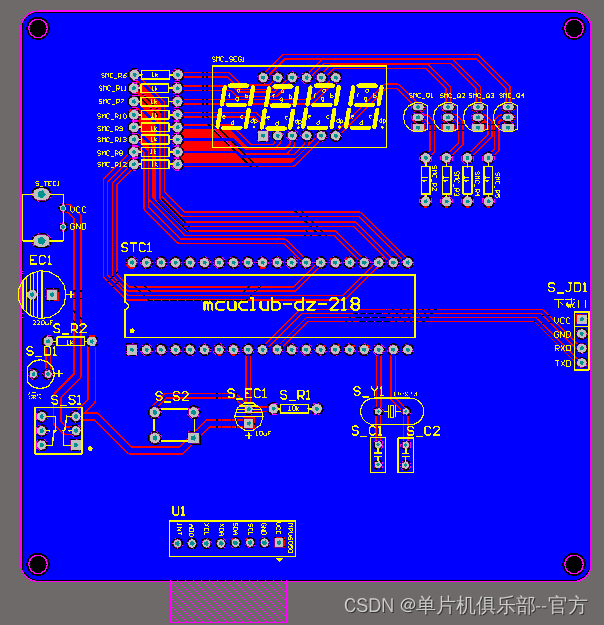
七、部分程序展示
软件版本:keil5
逻辑程序和驱动程序分开,分布于main.c和其他.c文件
*******监测函数
*****/
void Monitor_function(void)
{
if(time_num % 10 == 0)
{
MPU6050_accel_x = MPU6050_GetData(ACCEL_XOUT_H);//获取X轴加速度
if(MPU6050_accel_x > 50) //判断有无走步
{
if(flag_down == 0)
{
flag_up = 0;
flag_down = 1;
step_num ++;
}
}
else if(MPU6050_accel_x < -50)
{
if(flag_up == 0)
{
flag_down = 0;
flag_up = 1;
step_num ++;
}
}
}
}
/****
*******显示函数
*****/
void Display_function(void)
{
Display_Tube_4(step_num);
}

















 1787
1787

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









