






 本文介绍了一个使用ROS的TF2库进行坐标变换监听并控制机器人速度的示例程序。通过查找“qrcamera”到“marker”的变换,程序获取了位置信息,并将这些信息用于控制机器人运动。示例中,机器人被设定为沿x轴正方向以固定速度移动。
本文介绍了一个使用ROS的TF2库进行坐标变换监听并控制机器人速度的示例程序。通过查找“qrcamera”到“marker”的变换,程序获取了位置信息,并将这些信息用于控制机器人运动。示例中,机器人被设定为沿x轴正方向以固定速度移动。
$rosrun tf tf_echo qrcamera marker
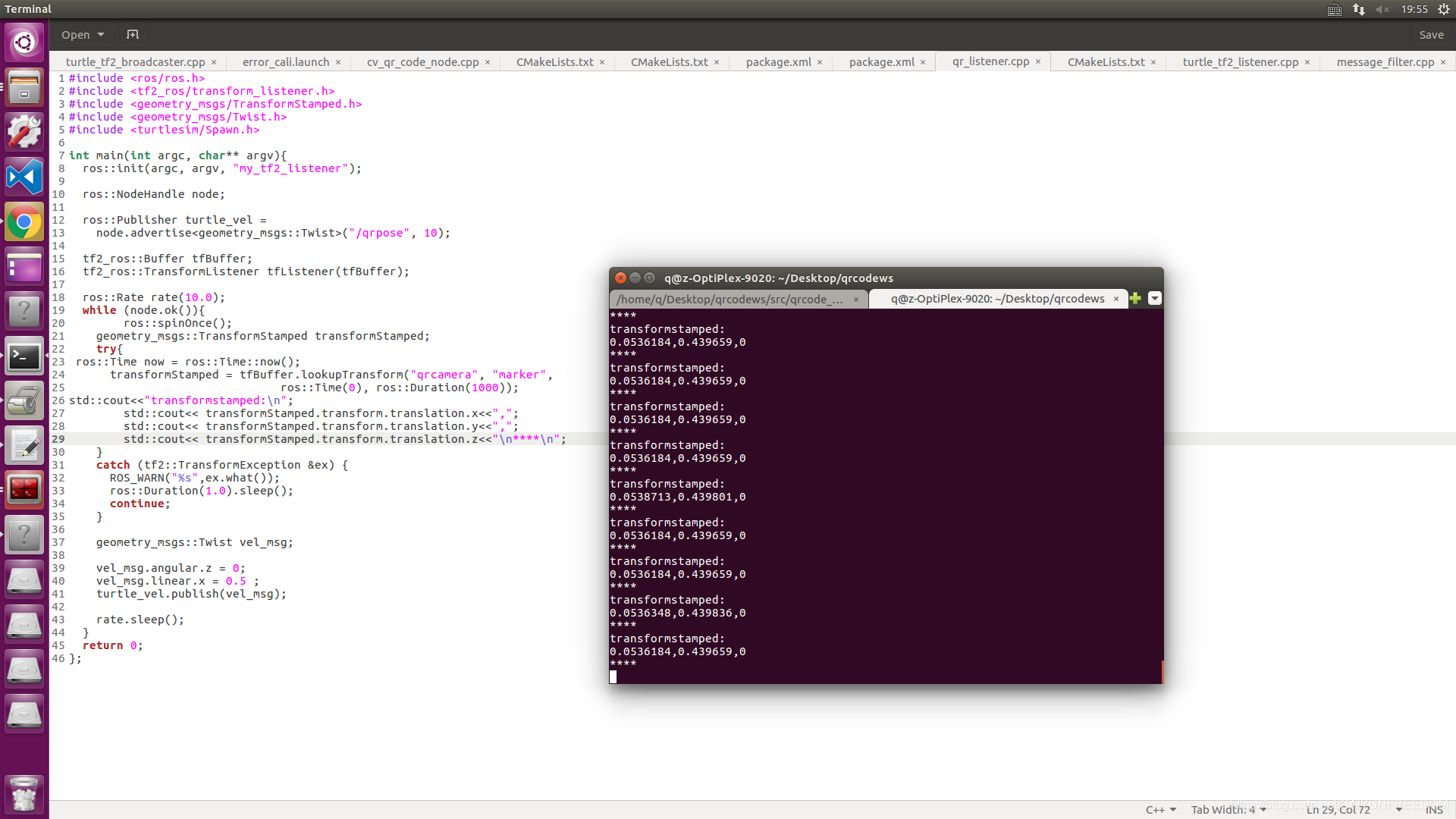
#include <ros/ros.h>
#include <tf2_ros/transform_listener.h>
#include <geometry_msgs/TransformStamped.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf2_listener");
ros::NodeHandle node;
ros::Publisher turtle_vel =
node.advertise<geometry_msgs::Twist>("/qrpose", 10);
tf2_ros::Buffer tfBuffer;
tf2_ros::TransformListener tfListener(tfBuffer);
ros::Rate rate(10.0);
while (node.ok()){
ros::spinOnce();
geometry_msgs::TransformStamped transformStamped;
try{
ros::Time now = ros::Time::now();
transformStamped = tfBuffer.lookupTransform("qrcamera", "marker",
ros::Time(0), ros::Duration(1));
std::cout<<"transformstamped:\n";
std::cout<< transformStamped.transform.translation.x<<",";
std::cout<< transformStamped.transform.translation.y<<",";
std::cout<< transformStamped.transform.translation.z<<"\n****\n";
}
catch (tf2::TransformException &ex) {
ROS_WARN("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 0;
vel_msg.linear.x = 0.5 ;
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
static tf2_ros::TransformBroadcaster br;
transformStamped.header.stamp = ros::Time::now();
transformStamped.header.frame_id = "qrcamera";
transformStamped.child_frame_id = "marker";
transformStamped.transform.translation.x = bc_cv.getX();
transformStamped.transform.translation.y = bc_cv.getY();
transformStamped.transform.translation.z = 0.0;
tf2::Quaternion q;
q.setRPY(0, 0, -yaw);
transformStamped.transform.rotation.x = q.x();
transformStamped.transform.rotation.y = q.y();
transformStamped.transform.rotation.z = q.z();
transformStamped.transform.rotation.w = q.w();
br.sendTransform(transformStamped);

















 4549
4549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









