



Features--jupyter notebooks
Cubic Bézier curves - Unmanned Underwater Vehicle Simulator Documentation
 segments, tangents = BezierCurve.generate_cubic_curve(q)
segments, tangents = BezierCurve.generate_cubic_curve(q)
ValueError: too many values to unpack
2D Dubins path algorithm - Unmanned Underwater Vehicle Simulator Documentation
('in c1:', [SX(7.28298), SX(9.63034)], [SX(0.423319), SX(-3.99142)], <class 'casadi.casadi.SX'>, '\n', SX([7.28298, 0.423319]))
ax.plot([c1[0], c1[0] + t1[0]], [c1[1], c1[1] + t1[1]], 'k')
RuntimeError: .../casadi/core/slice.cpp:70: Assertion "stop<=len" failed:
Slice (start=1, stop=2, step=1) out of bounds with supplied length of 1
C1[1]越界?
在此代码前添加,如下两行代码,可以消除上述的错误。
c1=[float(c1[0]),float(c1[1])]
t1=[float(t1[0]),float(t1[1])]
from uuv_trajectory_generator import HelicalSegment
ImportError: cannot import name HelicalSegment
create_new_vehicle
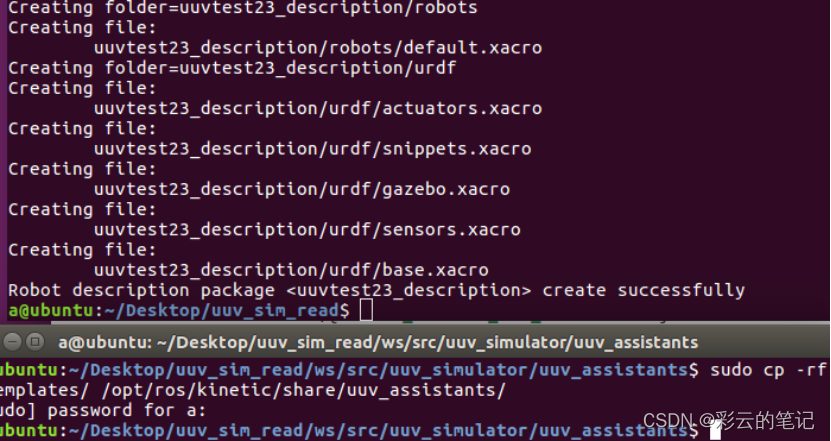
Create new vehicle - Unmanned Underwater Vehicle Simulator Documentation
执行下列指令,遇到错误
$ rosrun uuv_assistants create_new_robot_model --robot_name uuvtest23
Traceback (most recent call last):
File "/opt/ros/kinetic/lib/uuv_assistants/create_new_robot_model", line 59, in <module>
for d in os.listdir(template_path):
OSError: [Errno 2] No such file or directory: '/opt/ros/kinetic/share/uuv_assistants/templates/robot_model'
解决方法:
uuv_simulator/uuv_assistants$ sudo cp -rf templates/ /opt/ros/kinetic/share/uuv_assistants/

















 4379
4379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









