









 本文详细解析了OpenCV中相机标定过程及参数(cameraMatrix, distCoeffs)的含义,同时介绍了如何使用rvecs和tvecs进行位姿估计,包括姿态和位移在相机坐标系下的表示。
本文详细解析了OpenCV中相机标定过程及参数(cameraMatrix, distCoeffs)的含义,同时介绍了如何使用rvecs和tvecs进行位姿估计,包括姿态和位移在相机坐标系下的表示。
(,cameraMatrix, distCoeffs, rvecs, tvecs); 在Opencv的API中 经常可以看到这样的参数.
cameraMatrix, distCoeffs 是相机的参数,可以通过标定得到.
官网教程
Camera calibration and 3D reconstruction (calib3d module)
https://docs.opencv.org/3.4.0/d6/d55/tutorial_table_of_content_calib3d.html
相机标定过程中的左边系,官方介绍链接
http://homepages.inf.ed.ac.uk/rbf/CVonline/LOCAL_COPIES/OWENS/LECT9/node2.html
https://blog.youkuaiyun.com/CAIYUNFREEDOM/article/details/100573814
rvecs, tvecs
cv::aruco::estimatePoseSingleMarkers(corner, marker_len,cameraMatrix, distCoeffs, rvecs, tvecs);。
定位结果。Rvecs代表姿态(camera 坐标系到marker坐标系的变换,camera 坐标系是参考坐标系), tvecs代表位移在camera坐标系下的表示。
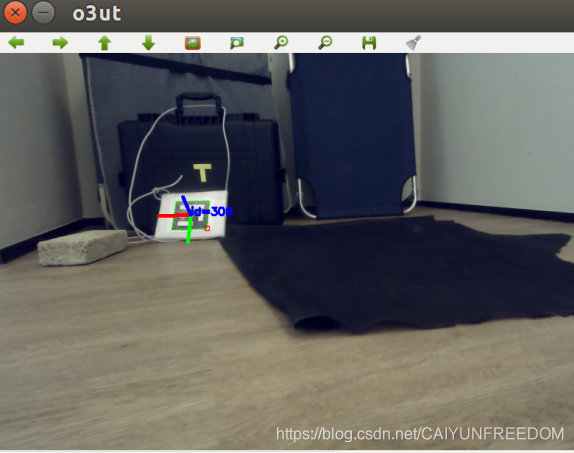
Marker坐标系如上图所示,红色是X, 绿色是Y,蓝色是Z。是右手坐标系。
Camera坐标系光轴方向是Z轴.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









