



大家好啊,今天来聊一下环状点云内插的事儿,介绍一下我的思路。
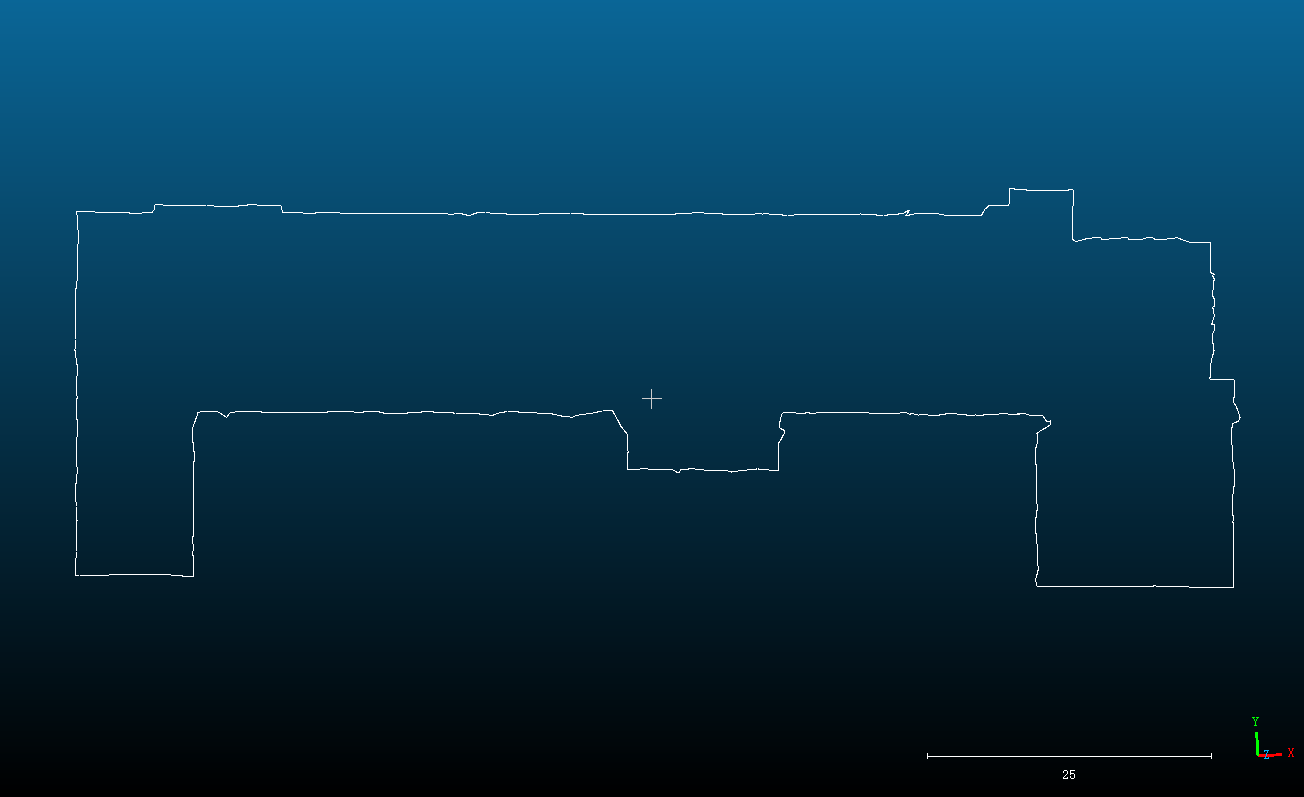
如下图,有一片环状点云,如果需要向其内部插入点,应该怎么做?
我的思路其实非常简单,
1、抽稀环状点云
2、将抽稀后环状点云排序并构成闭合多边形
3、计算抽稀后的环状点云的包围盒,在包围中随机生成若干点,判断这些点是否在上一步构成的闭合多边形内部
4、输出结果
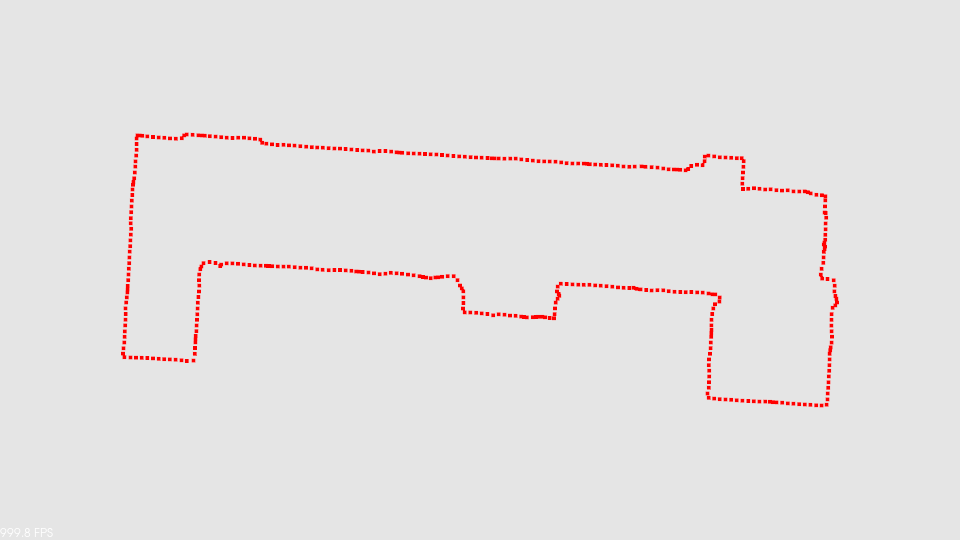
给大家看一下效果吧,这是抽稀后的环状点云:
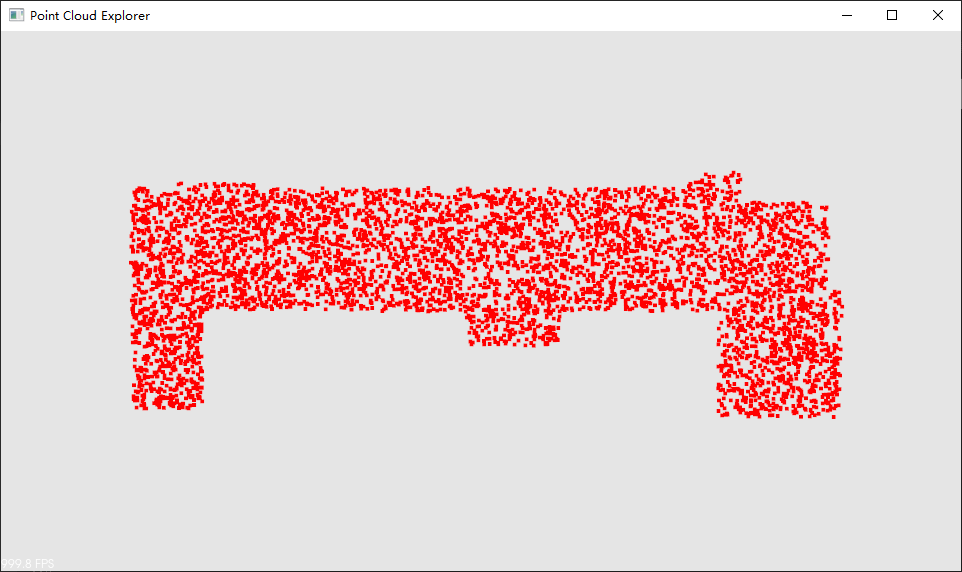
这是向其内部插值填充后的结果:
完整代码如下,引用的函数我也补充在下面了:
void fullfill2(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
{
//1、环状点云抽稀
cloud = Evenly_Dilute(cloud, 50);
//2、环状点云排序
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud2(new pcl::PointCloud<pcl::PointXYZ>);
sortPointCloudLoop(cloud, cloud2);
//3、环状点云包围盒计算
std::vector<float> edge_length;
pcl::PointXYZ minPoint, maxPoint;
pcl::getMinMax3D(*cloud2, minPoint, maxPoint);
//4、生成随机点并验证是否在多边形内
pcl::PointCloud<pcl::PointXYZ>::Ptr result(new pcl::PointCloud<pcl::PointXYZ>);
for (int i = 0; i < 10000; i++)
{
pcl::PointXYZ randomPoint;
randomPoint.x = generateRandomDouble(minPoint.x, maxPoint.x);
randomPoint.y = generateRandomDouble(minPoint.y, maxPoint.y);
randomPoint.z = 0;
if (pointcloud_polygonsContain(cloud2, randomPoint))
{
result->points.push_back(randomPoint);
}
}
//5、保存结果并退出
pcl::io::savePCDFile("pIVp.pcd", *cloud);
}
均匀抽稀这块的函数我就省略了,大家自己写吧,不是很困难。抽稀主要是为了方便下一步排序,如果点数过多,存在排序错误的风险。
bool sortPointCloudLoop(const pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud_in,
pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud_out)
{
// 检查输入点云
if (cloud_in->empty()) {
std::cerr << "输入点云为空!" << std::endl;
return false;
}
int n_points = cloud_in->size();
if (n_points <= 1) {
*cloud_out = *cloud_in;
return true;
}
// 创建KD树用于近邻搜索
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud(cloud_in);
// 用于存储排序结果的索引
std::vector<int> sorted_indices;
sorted_indices.reserve(n_points);
// 从第一个点开始
int current_point_idx = 0;
sorted_indices.push_back(current_point_idx);
// 用于标记点是否已被访问
std::vector<bool> visited(n_points, false);
visited[current_point_idx] = true;
// 找出所有点的顺序
for (int i = 0; i < n_points - 1; ++i) {
std::vector<int> pointIdxNKNSearch(2);
std::vector<float> pointNKNSquaredDistance(2);
// 查找当前点的最近邻
if (kdtree.nearestKSearch(cloud_in->points[current_point_idx], 2, pointIdxNKNSearch, pointNKNSquaredDistance) < 2) {
std::cerr << "无法找到足够的邻居点!" << std::endl;
continue;
}
// 获取最近的未访问点
int next_point_idx = -1;
// 检查第一个最近邻是否已访问
if (!visited[pointIdxNKNSearch[0]]) {
next_point_idx = pointIdxNKNSearch[0];
}
// 检查第二个最近邻是否已访问
else if (pointIdxNKNSearch.size() > 1 && !visited[pointIdxNKNSearch[1]]) {
next_point_idx = pointIdxNKNSearch[1];
}
// 如果最近的两个邻居都已访问,查找下一个最近的未访问点
else {
float min_dist = std::numeric_limits<float>::max();
for (int j = 0; j < n_points; ++j) {
if (!visited[j]) {
float dist = pcl::squaredEuclideanDistance(cloud_in->points[current_point_idx], cloud_in->points[j]);
if (dist < min_dist) {
min_dist = dist;
next_point_idx = j;
}
}
}
}
// 如果找不到下一个点,说明排序已完成
if (next_point_idx == -1) {
break;
}
// 添加下一个点并标记为已访问
sorted_indices.push_back(next_point_idx);
visited[next_point_idx] = true;
current_point_idx = next_point_idx;
}
// 构建排序后的点云
cloud_out->clear();
cloud_out->reserve(sorted_indices.size());
for (int idx : sorted_indices) {
cloud_out->push_back(cloud_in->points[idx]);
}
return true;
}
double generateRandomDouble(double min, double max)
{
std::random_device rd; // 随机设备
std::mt19937 gen(rd()); // 使用Mersenne Twister算法生成随机数
std::uniform_real_distribution<> dis(min, max); // 定义范围
return dis(gen); // 生成随机数
}
/// <summary>
/// 判断二维点是否在二维多边形内
/// </summary>
/// <param name="polygon">点云指针表征的多边形区域</param>
/// <param name="point">二维点坐标</param>
/// <returns>包含结果</returns>
bool pointcloud_polygonsContain(const pcl::PointCloud<pcl::PointXYZ>::Ptr& polygon, const pcl::PointXYZ& point)
{
int n = polygon->size();
if (n < 3)
{
return false;
}
int intersections = 0;
pcl::PointXYZ p1 = polygon->points[0];
for (int i = 1; i <= n; ++i)
{
pcl::PointXYZ p2 = polygon->points[i % n];
if (point.y == p1.y && point.y == p2.y && point.x >= std::min(p1.x, p2.x) && point.x <= std::max(p1.x, p2.x))
{
return true;
}
if (p1.y <= point.y && p2.y > point.y || (p2.y <= point.y && p1.y > point.y))
{
float vt = (point.y - p1.y) / (p2.y - p1.y);
if (p1.x + vt * (p2.x - p1.x) < point.x)
{
intersections++;
}
}
p1 = p2;
}
return intersections % 2 == 1;
}
最后我想说这个算法效率肯定不是很高,没有经过打磨,但是原理比较简单,大家可以试着对它进行二创,另外以本例来说,在包围盒内洒一万个豆子,能在多边形内的也就五百个,数量上可以根据自己的需求进行更改。

















 1531
1531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









