







1. 名词解释
DBSCAN:Density Based Spatial Clustering Application with Noise- 核心对象

- 直接密度达


- 密度可达:
A point q is reachable from p if there is a path p1, …, pn with p1 = p and pn = q, where each pi+1 is directly reachable from pi. Note that this implies that all points on the path must be core points, with the possible exception of q.
- 密度相连
- 簇
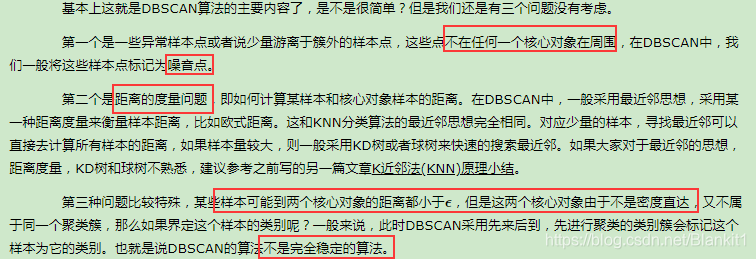
- 噪声
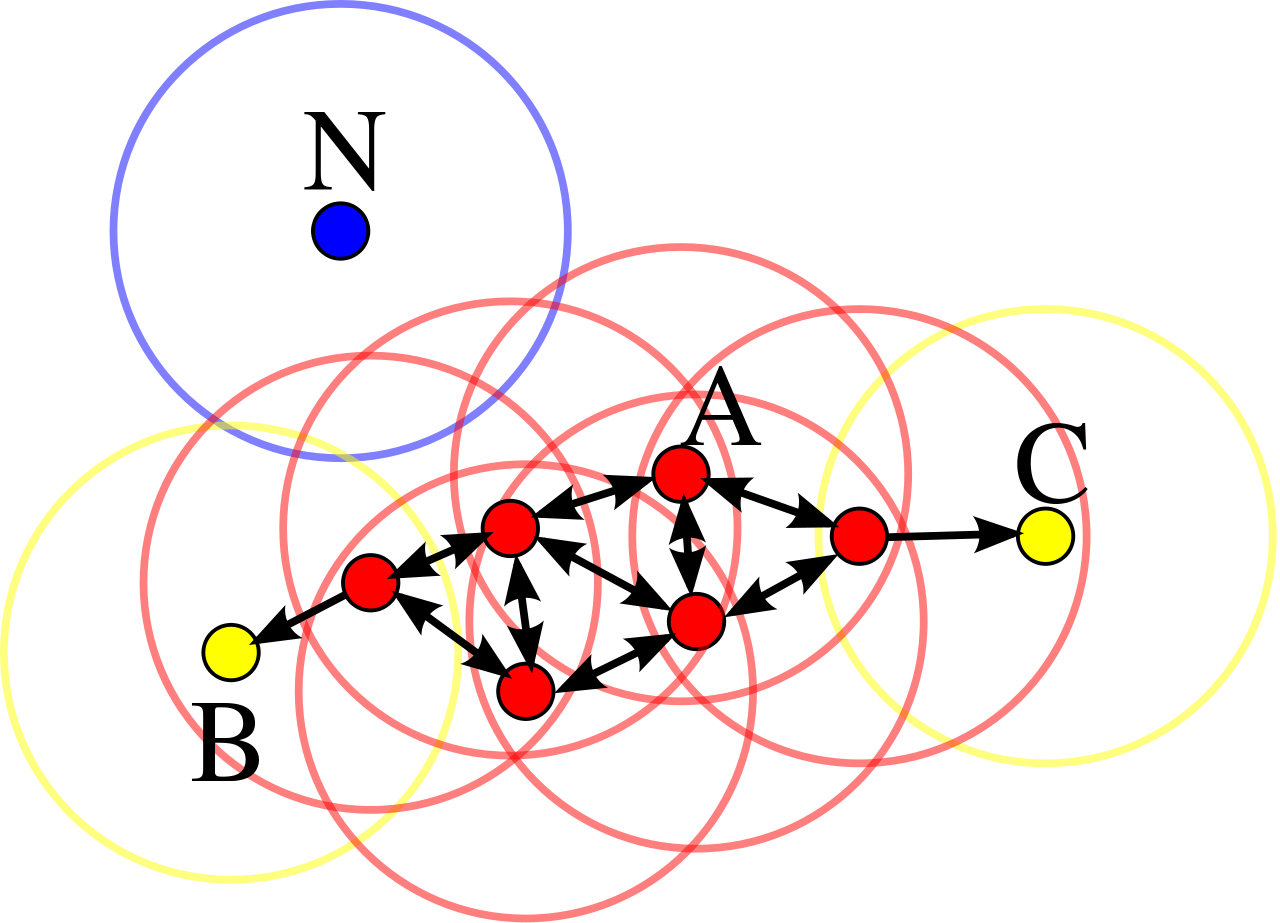
2. DBSCAN算法思想
由密度可达关系导出的最大密度相连的样本集合,即为我们最终聚类的一个类别,或者说一个簇。
那么怎么才能找到这样的簇样本集合呢?DBSCAN使用的方法很简单,它任意选择一个没有类别的核心对象作为种子,然后找到所有这个核心对象能够密度可达的样本集合,即为一个聚类簇。接着继续选择另一个没有类别的核心对象去寻找密度可达的样本集合,这样就得到另一个聚类簇。一直运行到所有核心对象都有类别为止。
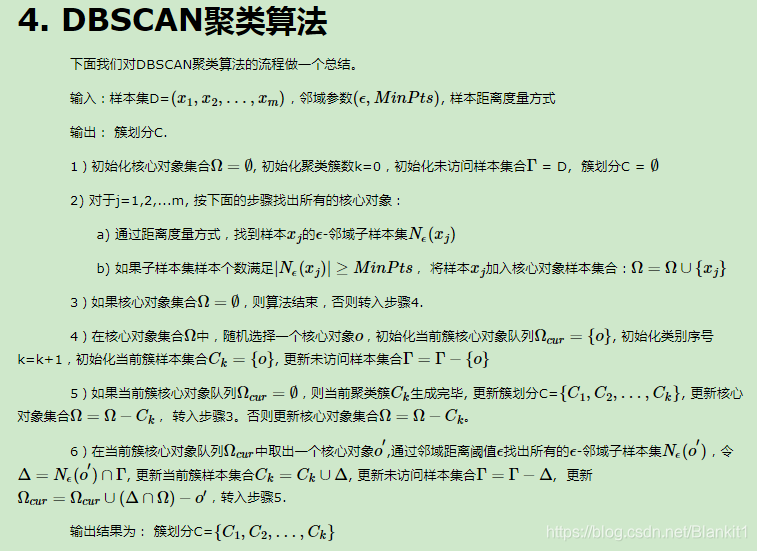
3. DBSCAN聚类算法步骤
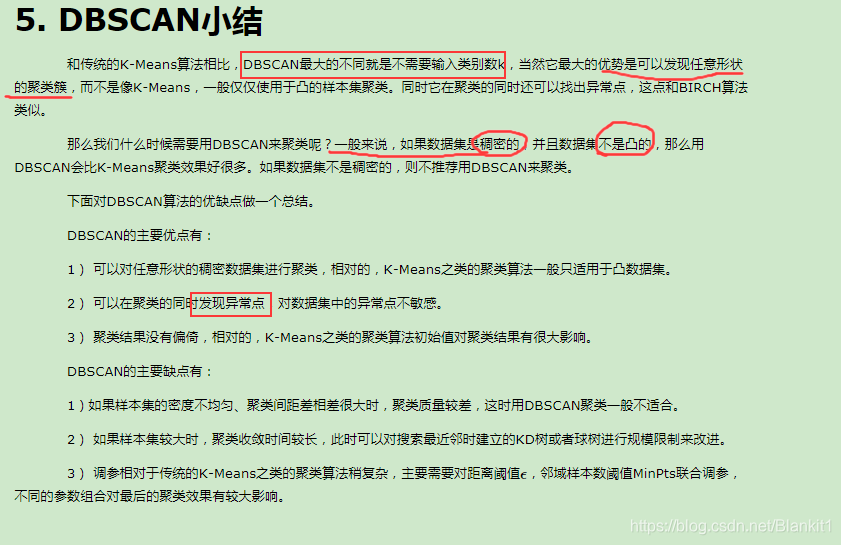
4 DBSCAN聚类算法优缺点
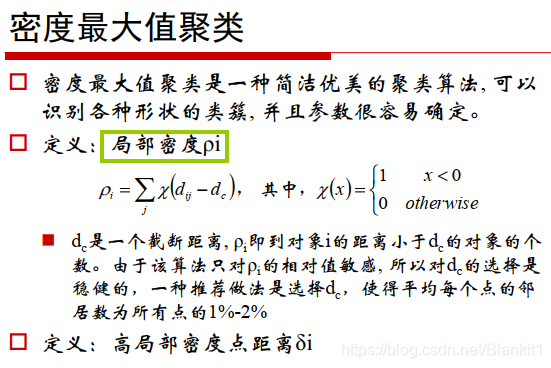
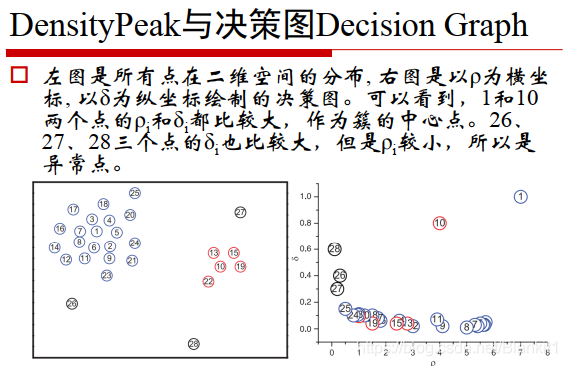
6 DensityPeak 密度最大值聚类
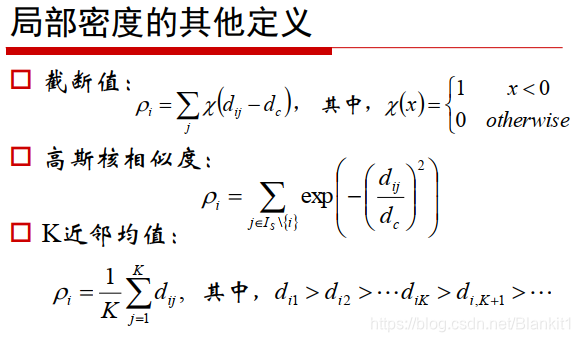
- 局部密度 ρ i \rho_{i} ρi
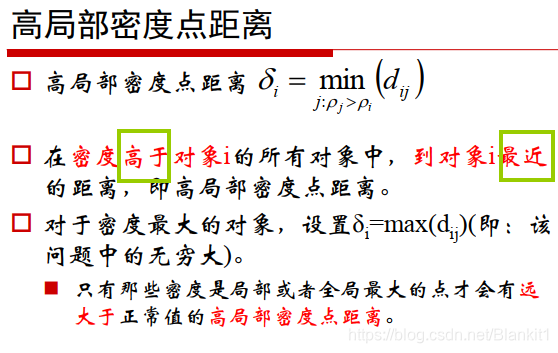
- 高局部密度点距离 δ i \delta_{i} δi
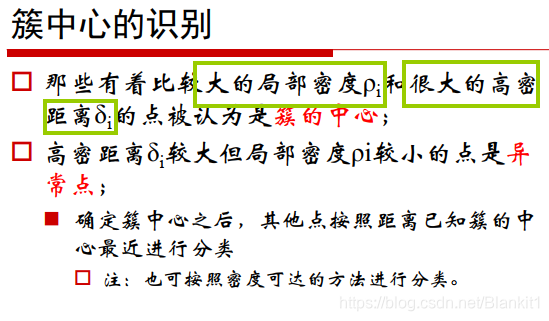
- 簇心
















 2436
2436

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









