






 本文详细介绍了C语言中的数据类型,包括整型、浮点型及其在内存中的存储方式。讲解了原码、反码、补码的概念,以及大小端存储模式的区别。此外,还探讨了浮点数在内存中的表示,遵循IEEE754标准,并提供了相关练习题帮助读者巩固理解。
本文详细介绍了C语言中的数据类型,包括整型、浮点型及其在内存中的存储方式。讲解了原码、反码、补码的概念,以及大小端存储模式的区别。此外,还探讨了浮点数在内存中的表示,遵循IEEE754标准,并提供了相关练习题帮助读者巩固理解。
文章目录
本章重点
1.数据类型详细介绍
2.整型在内存中的存储:原码,反码,补码
3.大小端字节介绍及判断
4.浮点型在内存中的存储解析
1.数据类型介绍
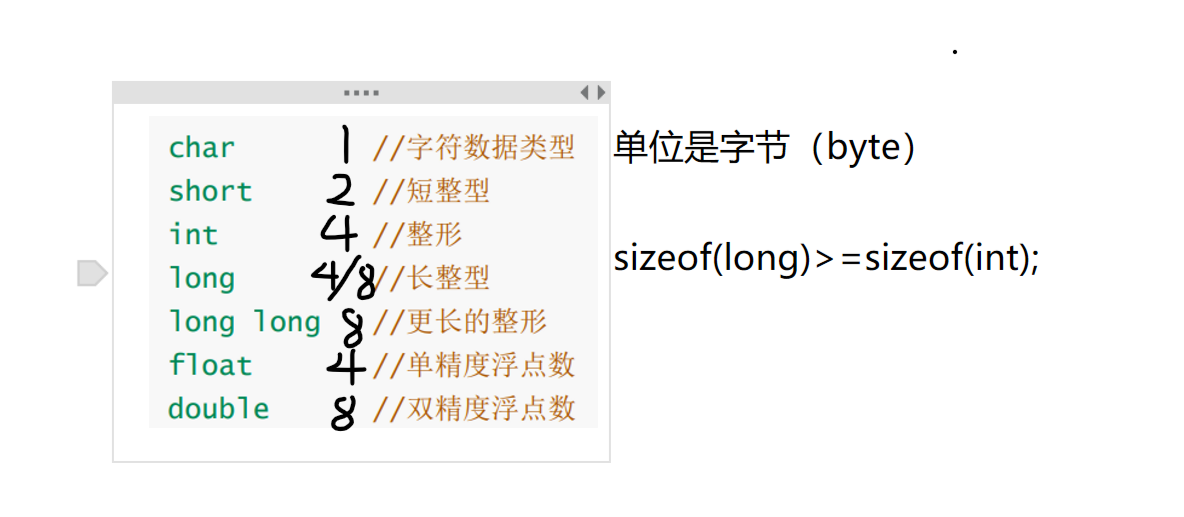
c语言的内置类型
不同类型开辟内存空间的大小不同,且存储规则也有差异。
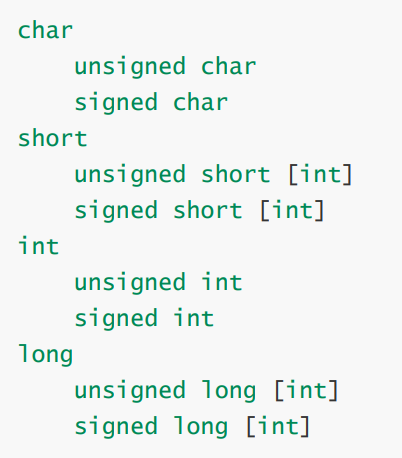
1.1类型的基本归类
整型家族
char 字符在存储的时候,存储的是ASCII码值,是整数。
所以归类的时候归为整型家族。
char是signed char还是unsigned char,C语言没有规定。
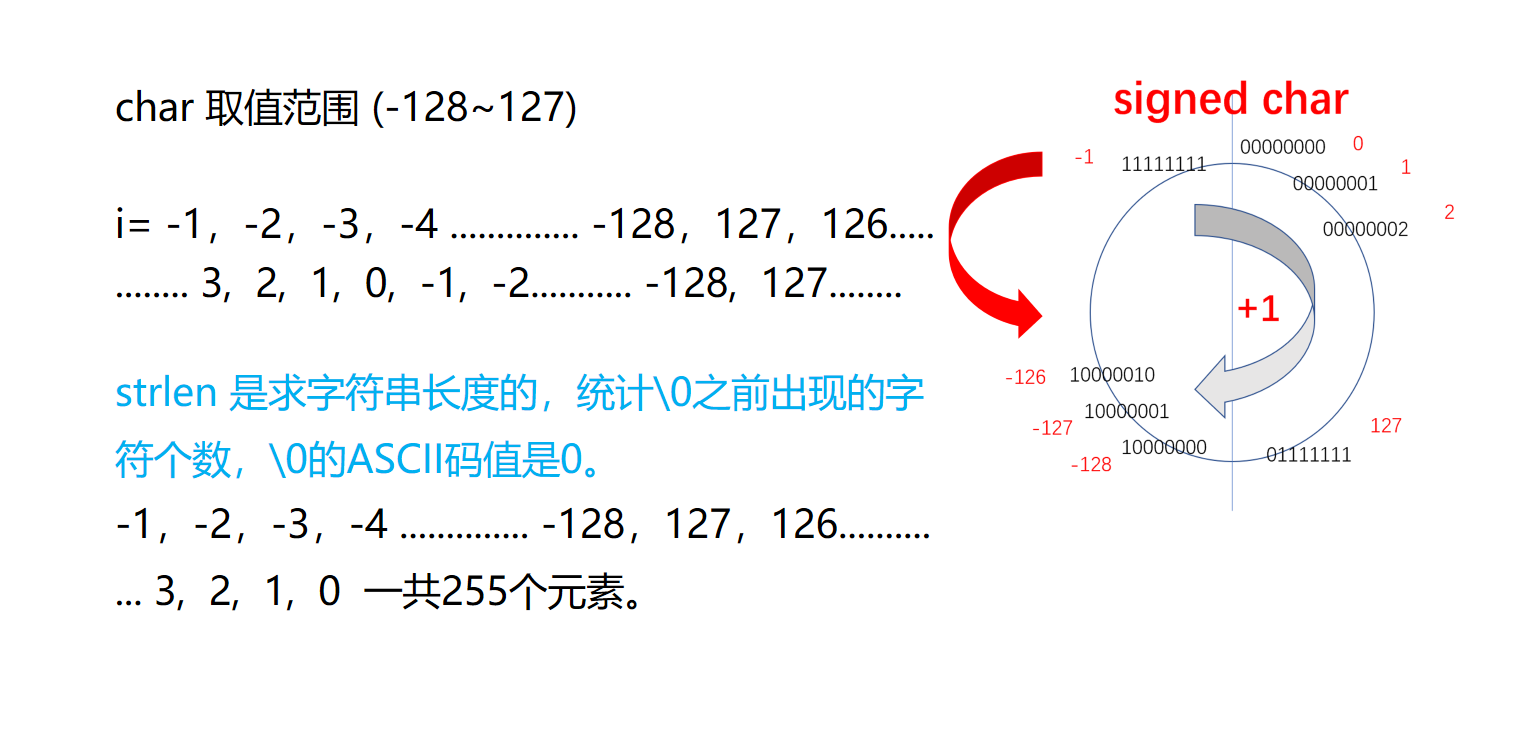
signed char 有符号位 取值范围(-128–127)
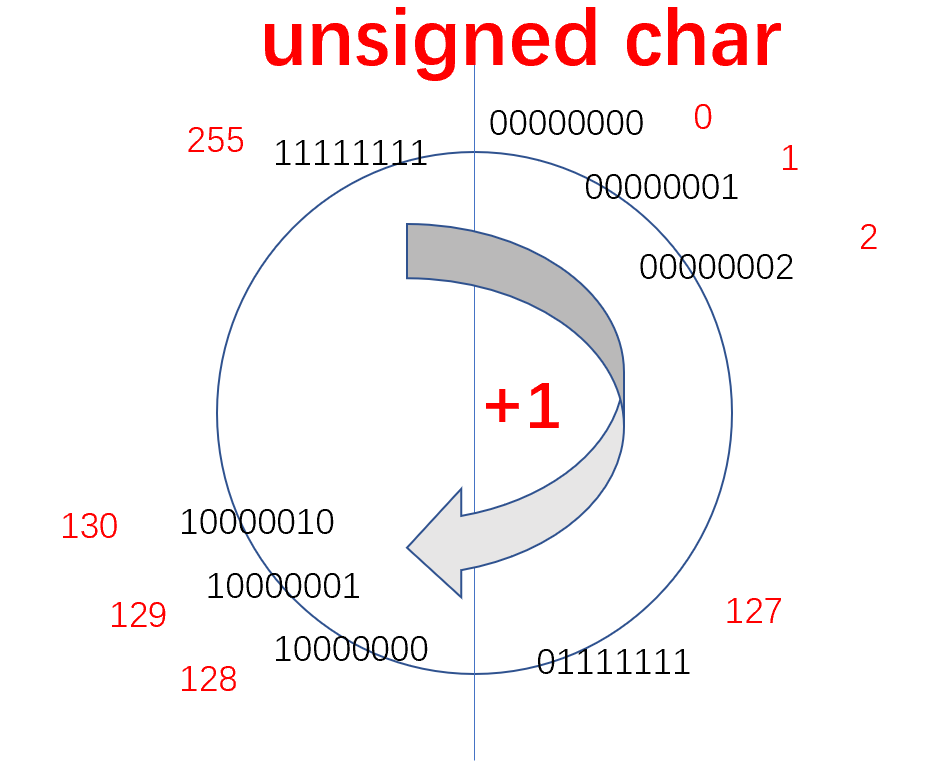
unsigned char 无符号位 取值范围 (0–255)
不同编译器对char是否是有符号的char,规定不同。
例如在VS编译器上,char->signed char。
举个signed char 和 unsigned char的例子来增加理解

浮点型家族
构造类型(自定义类型)
指针类型
空类型

2.整型在内存中的存储
创建一个变量要在内存中开辟一定的空间大小,不同类型的变量分配的空间大小也不同。
2.1原码,反码,补码
一个整型变量在内存中分配4个字节。
4个byte=32个bit。
也就是说系统为一个整型变量分配32个二进制位。
又将其分为符号位和数值位。
第1个二进制位为符号位,0表示正数,1表示负数。
其余的都为数值位。
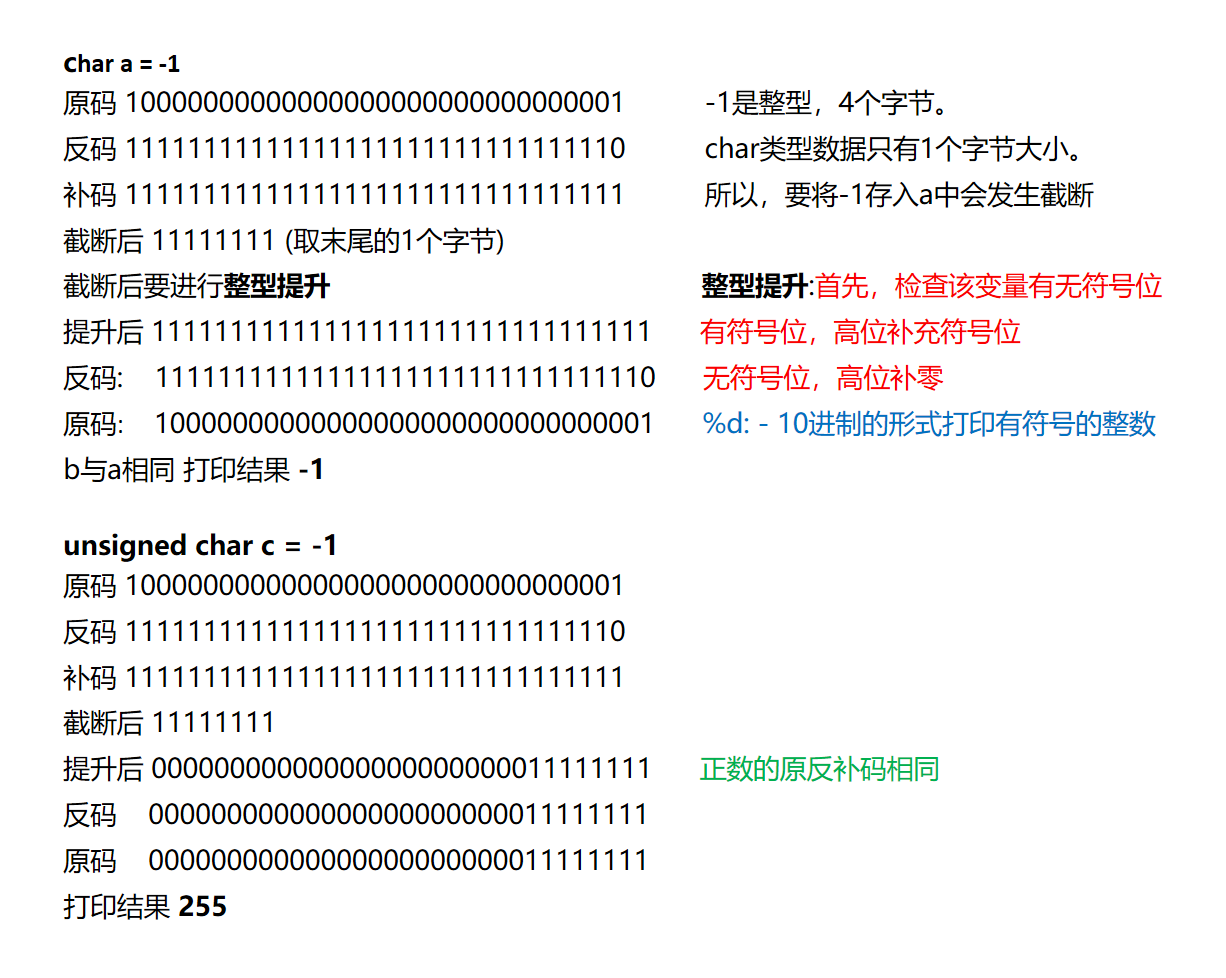
正数的原反补码相同。
负数的原反补各不相同。
原码:
直接将数值转化成二进制的形式,得到原码。
反码:
原码的符号位不变,其他位依次按位取反,得到反码。
补码:
反码加一,得到补码。
对于整型,内存中存放的数据是补码。
使用补码,可以将符号位和数值域统一处理。
加法和减法可以统一处理(CPU只有加法器)
补码与原码相互转换,其运算过程是相同的,不需要额外的硬件电路。
在这里,内存以16进制表示数据,4个2进制位转化为1个16进制位。
2个16进制位为1个字节的空间。
内存开辟了4个字节的空间来存放n的数据。
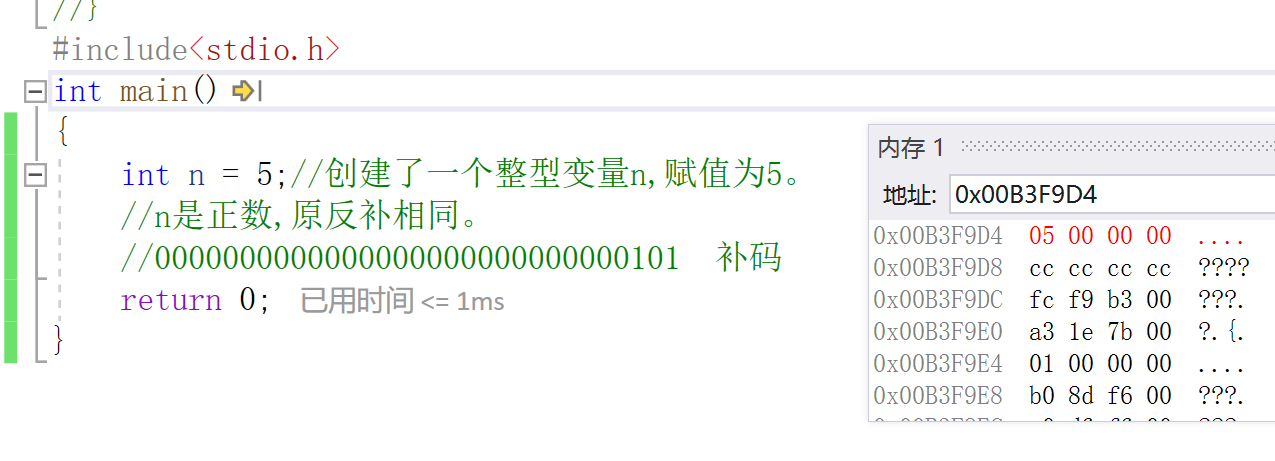
(为什么数据是倒着存放的?)
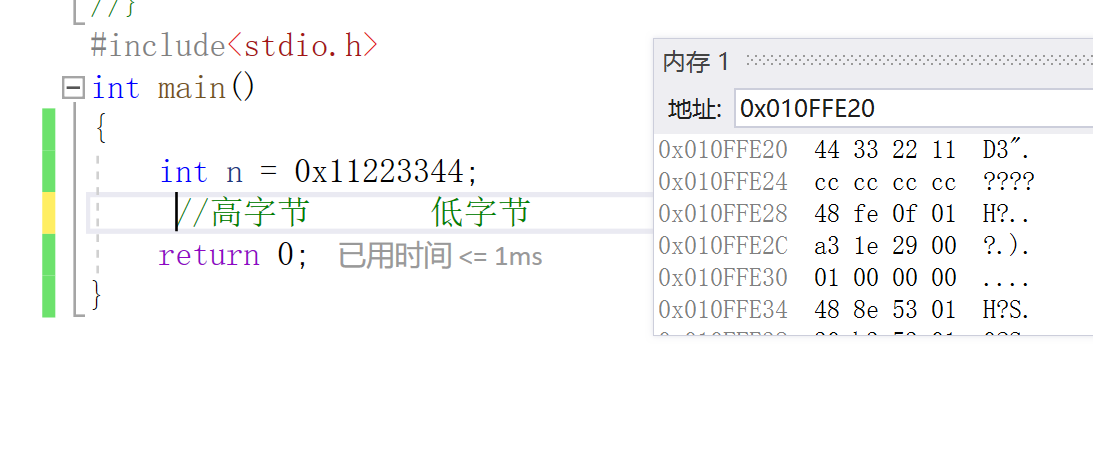
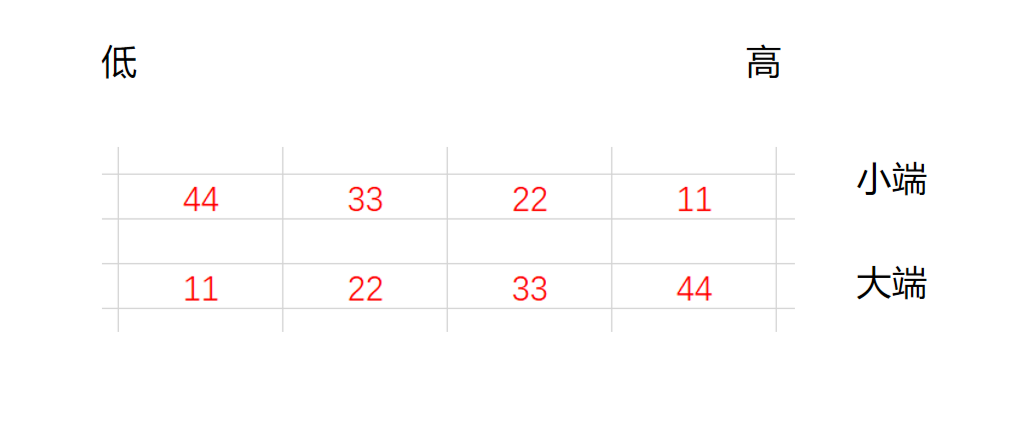
2.2大小端介绍
大端字节序存储:
指数据的低位保存在内存的高地址中,而数据的高位,保存在内存的低地址中。
小段字节序存储:
指数据的低位保存在内存的低地址中,而数据的高位,保存在内存的高地址中。
大端小端产生的原因:
为什么会有大小端模式之分呢?
这是因为在计算机系统中,我们是以字节为单位的,每个地址单元都对应着一个字节,一个字节为 8 bit 。但是在 C 语言中除了 8 bit 的 char 之外,还有 16 bit 的 short型, 32 bit 的 long 型(要看具体的编译器),另外,对于位数大于 8 位的处理器,例如 16 位或者 32位的处理器,由于寄存器宽度大于一个字节,那么必然存在着一个如何将多个字节安排的问题。因此就导致了大端存储模式和小端存储模式。
例如:一个 16bit 的 short 型 x ,在内存中的地址为 0x0010 , x 的值为 0x1122 ,那么 0x11 为高字节, 0x22 为低字节。对于大端模式,就将 0x11 放在低地址中,即0x0010 中, 0x22 放在高地址中,即 0x0011 中。小端模式,刚好相反。我们常用的 X86 结构是小端模式,而 KEIL C51 则为大端模式。很多的 ARM , DSP 都为小端模式。有些 ARM 处理器还可以由硬件来选择是大端模式还是小端模式。
小练习
请你设计一个小程序来判断当前机器的字节序。
思路:
创建一个变量并赋值为1,取出该变量第1个字节的地址,并判断。
#include<stdio.h>
int check()
{
int i = 1;
return (*(char*)&i);
}
int main()
{
int ret = check();
if (ret == 1)
{
printf("小端");
}
else
{
printf("大端");
}
return 0;
}
2.3练习
1.
//输出什么?
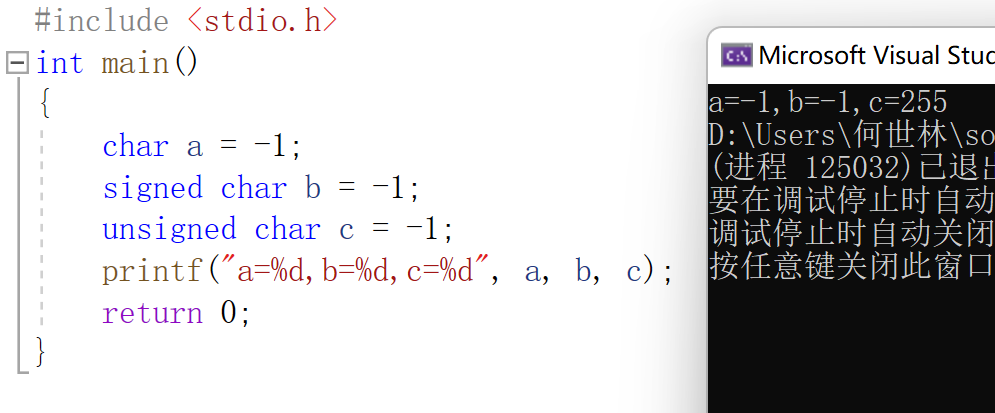
#include <stdio.h>
int main()
{
char a= -1;
signed char b=-1;
unsigned char c=-1;
printf("a=%d,b=%d,c=%d",a,b,c);
return 0;
}
2.
#include <stdio.h>
int main()
{
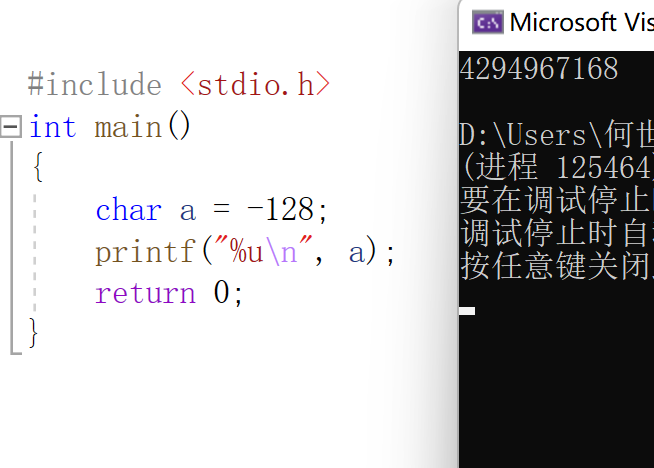
char a = -128;
printf("%u\n",a);
return 0;
}

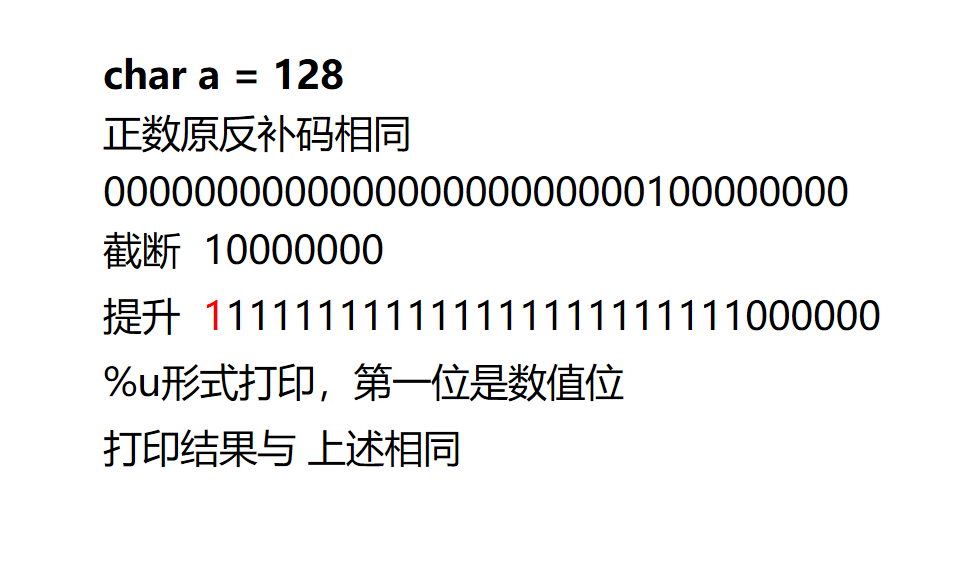
3.
#include <stdio.h>
int main()
{
char a = 128;
printf("%u\n",a);
return 0;
}
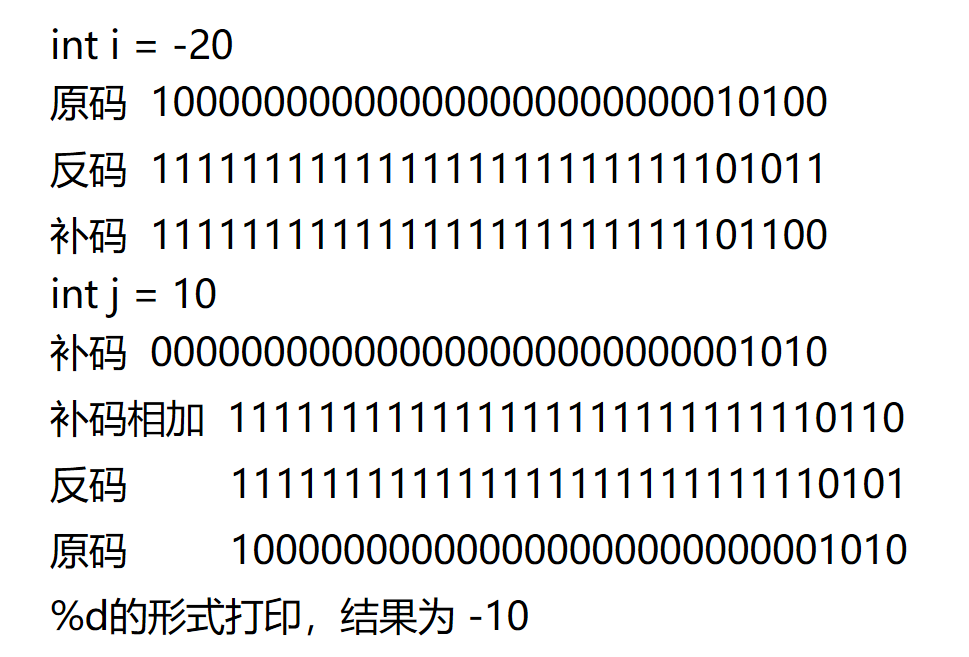
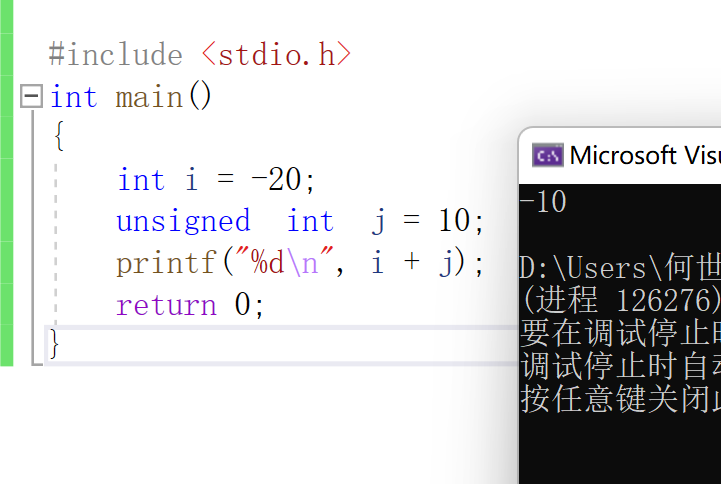
4.
int i= -20;
unsigned int j = 10;
printf("%d\n", i+j);
//按照补码的形式进行运算,最后格式化成为有符号整数
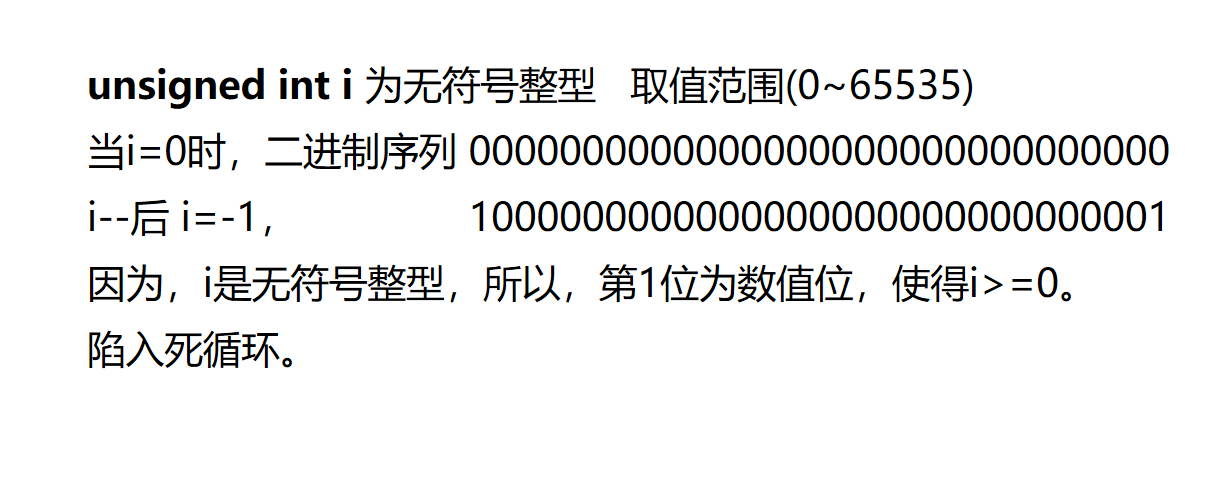
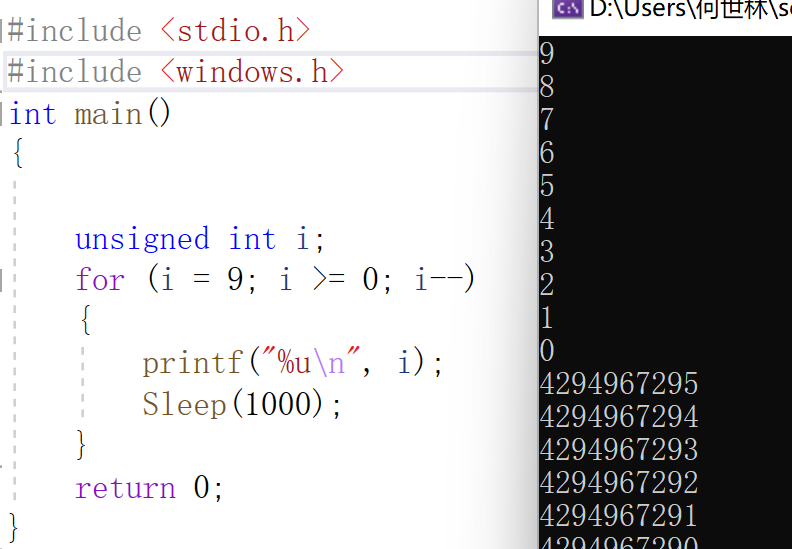
5.
unsigned int i;
for(i = 9; i >= 0; i--)
{
printf("%u\n",i);
}
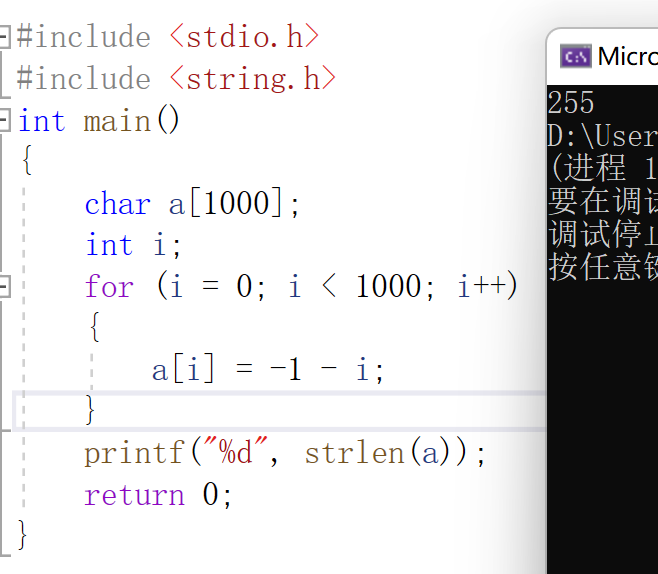
6.
int main()
{
char a[1000];
int i;
for(i=0; i<1000; i++)
{
a[i] = -1-i;
}
printf("%d",strlen(a));
return 0;
}
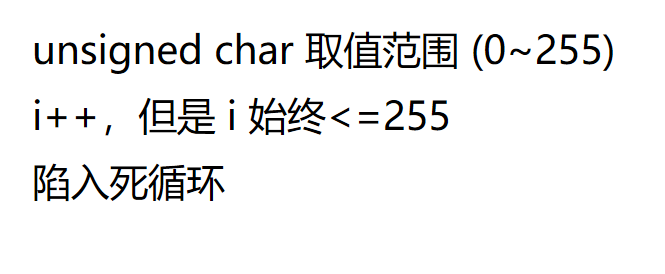
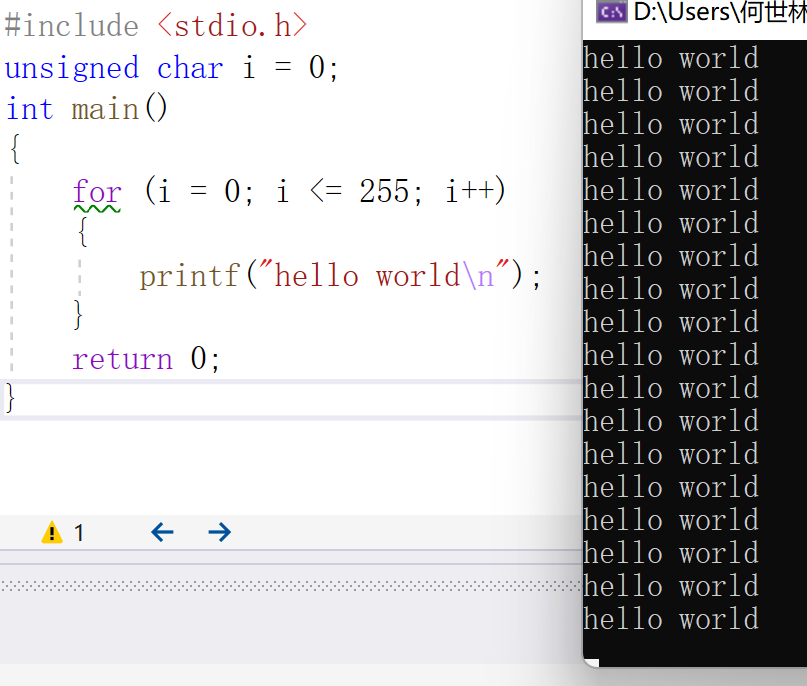
7.
#include <stdio.h>
unsigned char i = 0;
int main()
{
for(i = 0;i<=255;i++)
{
printf("hello world\n");
}
return 0;
}
3.浮点型在内存中的存储
常见的浮点数:
3.14159
1E10 -> 1.0X10^10
1E10 是一个使用 数字科学记数法 表示10 的 10 次方(e -> exponent 表示指数)
浮点数家族包括: float、double、long double 类型
浮点数表示的范围:float.h中定义
3.1实例演示
思考一下,下列代码的运行结果。
int main()
{
int n = 9;
float *pFloat = (float *)&n;
printf("n的值为:%d\n",n);
printf("*pFloat的值为:%f\n",*pFloat);
*pFloat = 9.0;
printf("num的值为:%d\n",n);
printf("*pFloat的值为:%f\n",*pFloat);
return 0;
}
你能猜到是这个答案吗!!!
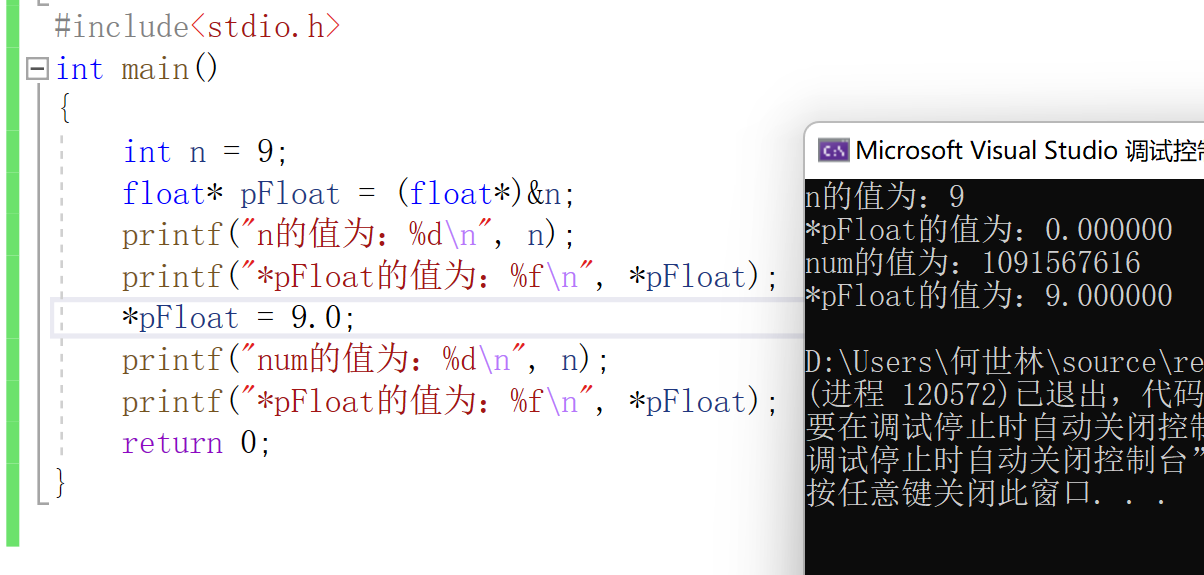
以%f的形式取出内存中int类型的变量,得到了一个奇怪的值。
以%d的形式取出内存中float类型的变量,得到的值同样奇怪。
在这里,我们不难猜出整型类型与浮点型类型在内存中存储数据的方式有差异。
3.2浮点数存储规则
要理解上述结果,一定要搞懂浮点数在计算机内部的表示方法。
详细解读:
根据国际标准IEEE(电气和电子工程协会) 754,任意一个二进制浮点数V可以表示成下面的形式:
V = (-1)^S * M * 2^E
(-1)^S表示符号位,当S=0,V为正数;当S=1,V为负数。
M表示有效数字,大于等于1,小于2。
2^E表示指数位。
举例来说:
十进制的5.0,写成二进制是 101.0 ,相当于 1.01×2^2 。
那么,按照上面V的格式,可以得出S=0,M=1.01,E=2。
十进制的-5.0,写成二进制是 -101.0 ,相当于 -1.01×2^2 。那么,S=1,M=1.01,E=2。
IEEE 754规定:
对于32位的浮点数,最高的1位是符号位S,接着的8位是指数E,剩下的23位为有效数字M。

对于64位的浮点数,最高的1位是符号位S,接着的11位是指数E,剩下的52位为有效数字M。

IEEE 754对有效数字M的规定
1 <= M <= 2,意思是M应写成1.xxxxx的形式,其中xxxxx为小数部分。
在计算机内部保存M时,默认将M转为1.xxxxx的形式,所以M的第一位总是1,因此可以被舍去,只保存后面的xxxxx,比如,保存1.01的时候,只保存01,等到读取数据时,再把第一位的1加上去,这样可以节省1位有效数字,以32位浮点数为例,留给M只有23位,将第一位的1舍去以后,等于可以保存24位有效数字。
IEEE 754对有效数字E的规定
首先,E为一个无符号整数(unsigned int)
这意味着,如果E为8位,它的取值范围为(0–255);如果E为11位,它的取值范围为(0–2047)。但是,我们知道,科学计数法中的E是可以出现负数的,所以IEEE 754规定,存入内存时E的真实值必须再加上一个中间数,对于8位的E,这个中间数是127;对于11位的E,这个中间数是1023。比如,2^10的E是10,所以保存成32位浮点数时,必须保存成10+127=137,即10001001。
3.3浮点型从内存中取出
对于符号位S
将第1个二进制位的数据取出,作为-1的指数。(-1)^S
对于有效数字M
将后(1+23)/(1+52)个二进制位取出,并在小数点前补1。
对于指数E,可以分为三种情况
E不全为0或不全为1
浮点数就采用下面的规则表示,即指数E的计算值减去127(或1023),得到真实值,再将有效数字M前加上第一位的1。
比如:
0.5(1/2)的二进制形式为0.1,由于规定正数部分必须为1,即将小数点右移1位,则为1.0*2^(-1),其阶码为-1+127=126,表示为01111110,而尾数1.0去掉整数部分为0,补齐0到23位00000000000000000000000。
则其二进制表示形式为:
0 01111110 00000000000000000000000
E全为0
E全为0,说明其真实值为-127。
(-1)^S * 1.xxxxx * 2^-127。非常小,无限接近0。
这时IEEE 754规定,E全为0时,浮点数的指数E等于1-127(或者1-1023)即为真实值,有效数字M不再加上第一位的1,而是还原为0.xxxxxx的小数。这样做是为了表示±0,以及接近于0的很小的数字。
E全为1
E全为1,说明其真实值为0
(-1)^S * 1.xxxx * 2^127。非常大,正负无穷大。
这时,如果有效数字M全为0,表示±无穷大(正负取决于符号位S)
现在我们来解释该代码
为什么 0x00000009 还原成浮点数,就成了 0.000000 ?
int n = 9;// 9 的二进制位00000000000000000000000000001001
首先,将9的二进制位拆分,得到第1位符号位S=0,后面8位指数E=00000000,最后23位有效数字M=00000000000000000000000。
由于指数E全为0
V = (-1)^0 * 0.00000000000000000001001 * 2^(-126) = 1.001 * 2^(-146)
显然,V是一个很小的接近于0的正数,所以用十进制小数表示就是0.000000。
为什么 9.0 还原成整型,就成了 1091567616 ?
*pFloat = 9.0;// 9.0 的二进制序列 1001.0
首先,将9.0的二进制转为科学计数法表示。
1001.0 -> 1.001*10^3
所以,符号位S=0,指数E=3+127=130 (10000010),有效数字M=001后补20个0。
其二进制形式为
0 10000010 001 0000 0000 0000 0000 0000
还原成十进制,正是1091567616。

















 1000
1000

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









