




 文章指出,仓库管理对企业生产销售至关重要,常见问题包括物料管理混乱、无条码化、效率低下等。解决这些问题需依赖科学制度和信息化系统,如采用条码管理实现自动化出入库、采购销售自动化管理和财务报表自动化对账。简道云的实践案例显示,这些方法能显著提高库存准确性和效率,减少错误。
文章指出,仓库管理对企业生产销售至关重要,常见问题包括物料管理混乱、无条码化、效率低下等。解决这些问题需依赖科学制度和信息化系统,如采用条码管理实现自动化出入库、采购销售自动化管理和财务报表自动化对账。简道云的实践案例显示,这些方法能显著提高库存准确性和效率,减少错误。
有人说:看一家工厂管理到不到位,看下他的仓库就知道了。
仓库作为企业存储和保管物料的重要场所,其管理的好坏直接影响着企业的生产与销售环节!
我拜访过很多制造型企业,他们的仓库或多或少都存在以下问题——
- 物料存放、移动等不记录,仅依靠管理员的记忆,找料困难耗时耗力
- 物料很少有条码化管理,少数几家有的,也仅仅是供应商的条码,无法在仓库中使用。
- 物料重复清点,耗时长,效率低,浪费人力
- 手工做账滞后并且效率低,人工核对还会经常出错
- ......
这些问题解决不了,企业仓库管理的效率至少打折一半,而这一半,就靠着堆人力、财力去补齐!
而想要彻底解决上述问题一是靠科学合理的制度制定与执行;
二是建立一个以仓库管理软件为支撑点的信息化系统。
点此查看模板:https://www.jiandaoyun.com
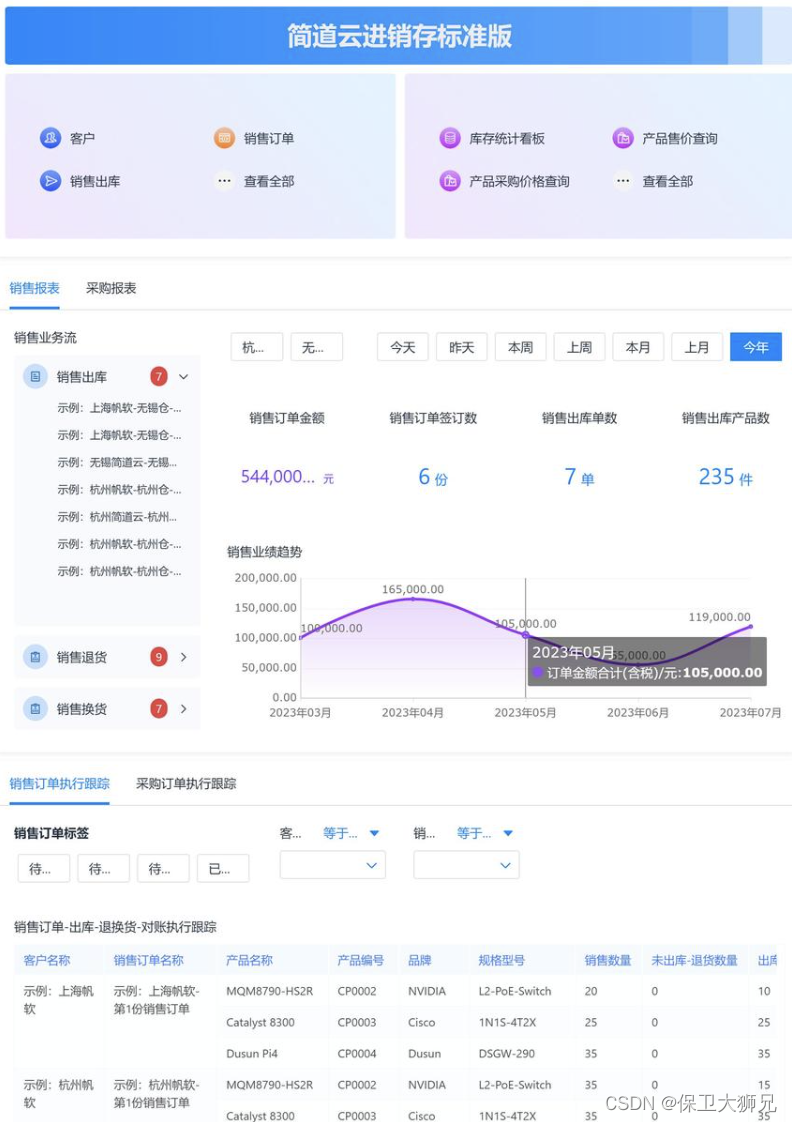
库存自动化管理
采用条码管理,给仓库的每个货品都设计好对应条码,管理员通过扫码即可完成货品出库、入库、调拨、盘点等工作。

数据实时更新实时查看,省去了人工录入、核对数据的麻烦,而且能够提高数据的准确率!

采购/销售自动化管理
在传统的采购刘成霞,采购缺乏统一管理,信息不透明。
而使用简道云自动化管理的环境下,采购下单后、自动提醒领导审批,采购入库、退货情况清晰记录,所有采购信息自动生成分析报表!

有了采购,自然也要有销售,在线查报价、录入合同、发起发货流程、退货流程,所有合同、发货、退货情况自动生成分析报表,这些都是能够轻松实现的。

财务报表自动化对账
员工在线录入财务申请,财务接到提醒消息,所有财务数据自动汇总生成多维分析报表,数据统计——数据分析——数据展示一站式完成!

最佳实践
浙江泓兴塑胶工业有限公司,是一家行业领先的塑料纱管制造企业。公司拥有自动化注塑机械设备五十多台,模具700余套,生产规模达到15000平方。
在他们传统的仓库管理中,存在一些痛点,比如——
仓库面积大,产品种类多体积小,同时因为库位紧张无法做到定位存放原先ERP没有库位的概念,用纸质或者Excel记录麻烦又无法保证时效性,并且人工录入数量会增加数据错误的可能性,导致库存不准、找货困难,由此产生的发错货又会导致客户投诉。
基于以上问题,他们使用简道云,将产品标签上印上二维码,方便仓库扫码出入库,自动识别标签上的装箱数,录入箱数自动计算出入库数量。同时将仓库重新划分库位,并在每个库位这里也放上二维码,出入库扫码进行定位。
这一举措,直接减少了人工计算的环节,降低了错误率,提高了库存的准确性和有效性通过盘点发现仓库的数据准确性可以达到97.65%。


















 3211
3211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









