




 本文详细介绍了最小势能法的概念及其在解决结构力学问题中的应用。通过计算弹性势能和外力做功,阐述了如何使用该方法求解例题,包括从微元体角度的推导和整体构件的分析。最后,通过矩阵形式展示了如何建立稳定系统的势能最小化方程。
本文详细介绍了最小势能法的概念及其在解决结构力学问题中的应用。通过计算弹性势能和外力做功,阐述了如何使用该方法求解例题,包括从微元体角度的推导和整体构件的分析。最后,通过矩阵形式展示了如何建立稳定系统的势能最小化方程。
最小总势能法
用下面三张图来说明最小总势能原理。
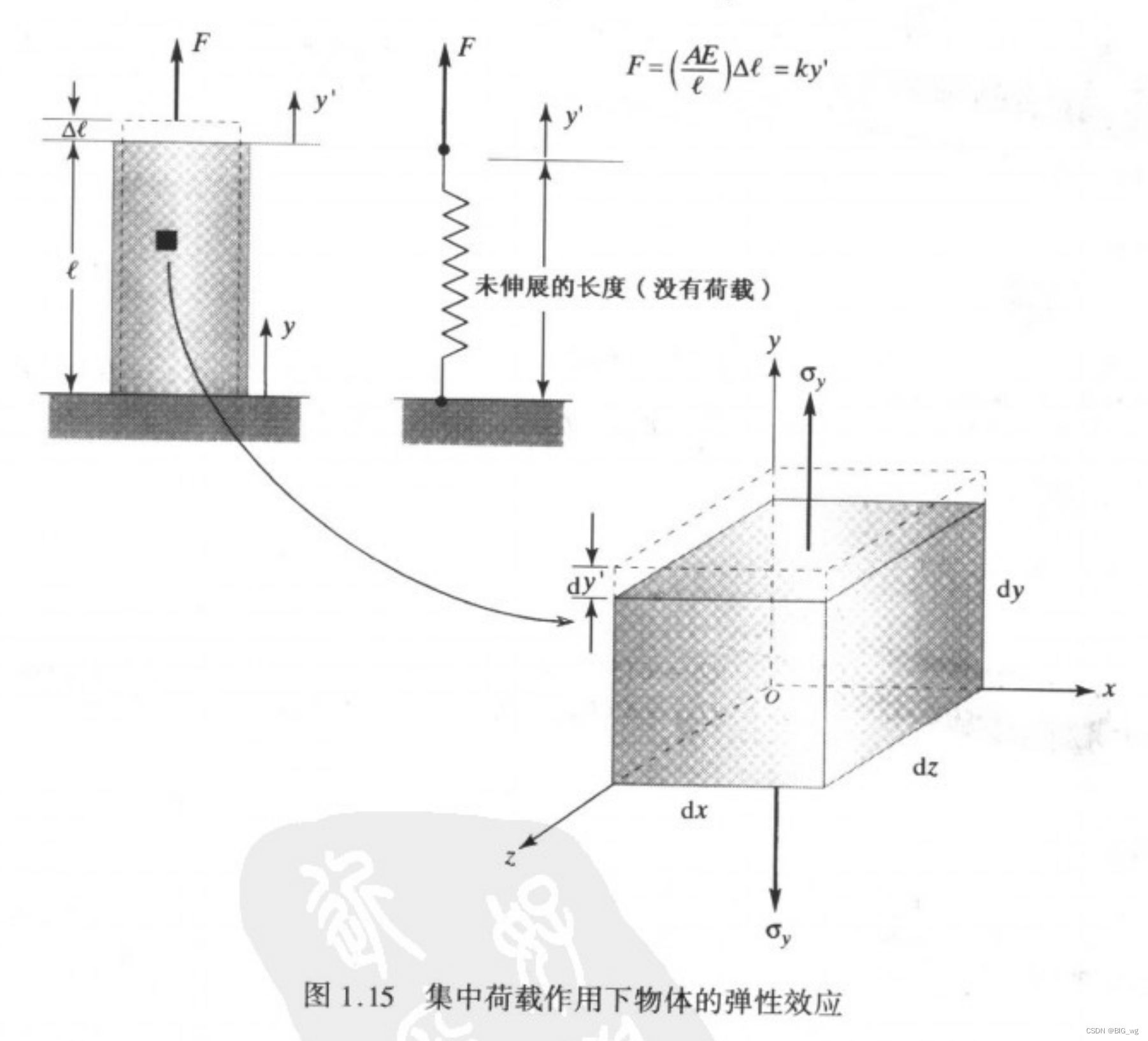
作用在物体上的外载荷会引起物体的变形,变形期间外力所做的功以弹性势能的形式储存在物体中,即为应变能。下面讨论集中力 F 作用在物体的应变能。
首先第一张图。集中力 F 作用在构件上表面,用 y' 来表征构件的变形量,它的值在 0 ~ \Delta l 之间变化。假设现在构件的变形量伸长量已经为 y' ,此时构件受到的力可以表示为:
$$
F=ky' \tag{1}
$$
则当构件再次伸长一个微量为 dy' 时,材料中增加的储存能量为:
$$
d\Lambda=Fdy'=ky'dy' \tag{2}
$$
对整体积分,计算拉伸量从 0 增长至 y’ 后的储存能量:
$$
\Lambda= \int_{0}^{y'}Fdy'=\int_{0}^{y'}ky'dy'={
{1}\over{2}}k{y'}^2={
{1}\over{2}}(k{y'})(y')={
{1}\over{2}}Fy \tag{3}
$$
其次第二张图。我们可以从微元体的角度推导。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1511
1511

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









