






技术博客文章示例
六自由度机械臂的三次与五次轨迹规划案例解析
在数字化制造飞速发展的今天,六自由度机械臂在各个领域中的应用越来越广泛。特别是在轨迹规划方面,其精确度和灵活性成为了机器人技术的重要评价指标。接下来,我们将从三次和五次轨迹规划的角度,深入探讨其在特定应用场景下的实现方式。
一、背景介绍
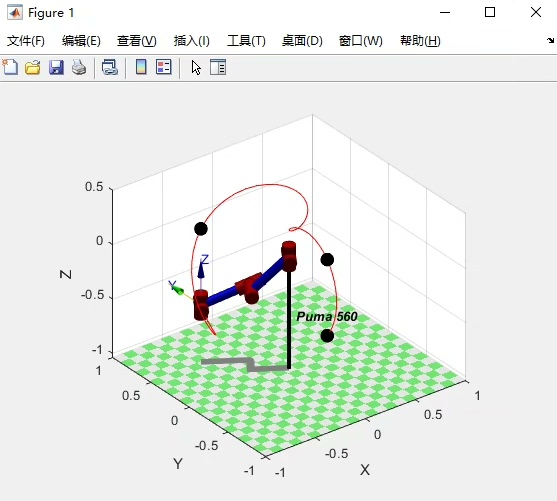
六自由度机械臂是一种高度灵活的工业机器人,其精度高、运动范围广,可以完成各种复杂的工作任务。在轨迹规划方面,由于其自由度的复杂性,需要使用专门的算法和代码来实现精确的运动控制。本文将通过具体的三次和五次轨迹规划代码示例,为大家展示如何在实际应用中实现这一功能。
二、三次轨迹规划代码解析
在三次轨迹规划中,我们通常会使用多项式样条插值曲线来进行平滑过渡。具体步骤如下:
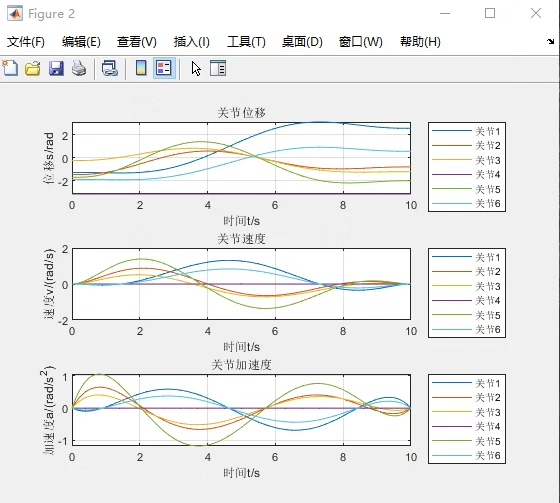
- 机械臂数据准备:首先,我们需要准备机械臂的相关数据,包括关节角度、速度等参数。这些数据可以根据实际需求进行修改和调整。
- 三次多项式样条插值算法实现:使用专业的轨迹规划算法,对机械臂的运动进行建模和插值。这个过程需要考虑到机械臂的动态特性、约束条件等因素。
- 代码示例:以下是具体的三次轨迹规划代码示例:
# 导入必要的库和模块
import numpy as np
from scipy.interpolate import make_interp_spline # 导入插值模块
# 定义机械臂参数和轨迹需求
arm_data = ... # 机械臂数据,包括关节角度、速度等参数
trajectory_requirements = ... # 轨迹需求,如圆弧轨迹、轨迹点等
# 进行三次多项式样条插值计算
spline = make_interp_spline(trajectory_requirements, arm_data) # 根据需求生成插值曲线
# 使用生成的插值曲线进行轨迹规划
trajectory = spline(np.arange(start_point, end_point, step)) # 根据起始点和终止点生成轨迹
三、五次轨迹规划代码示例
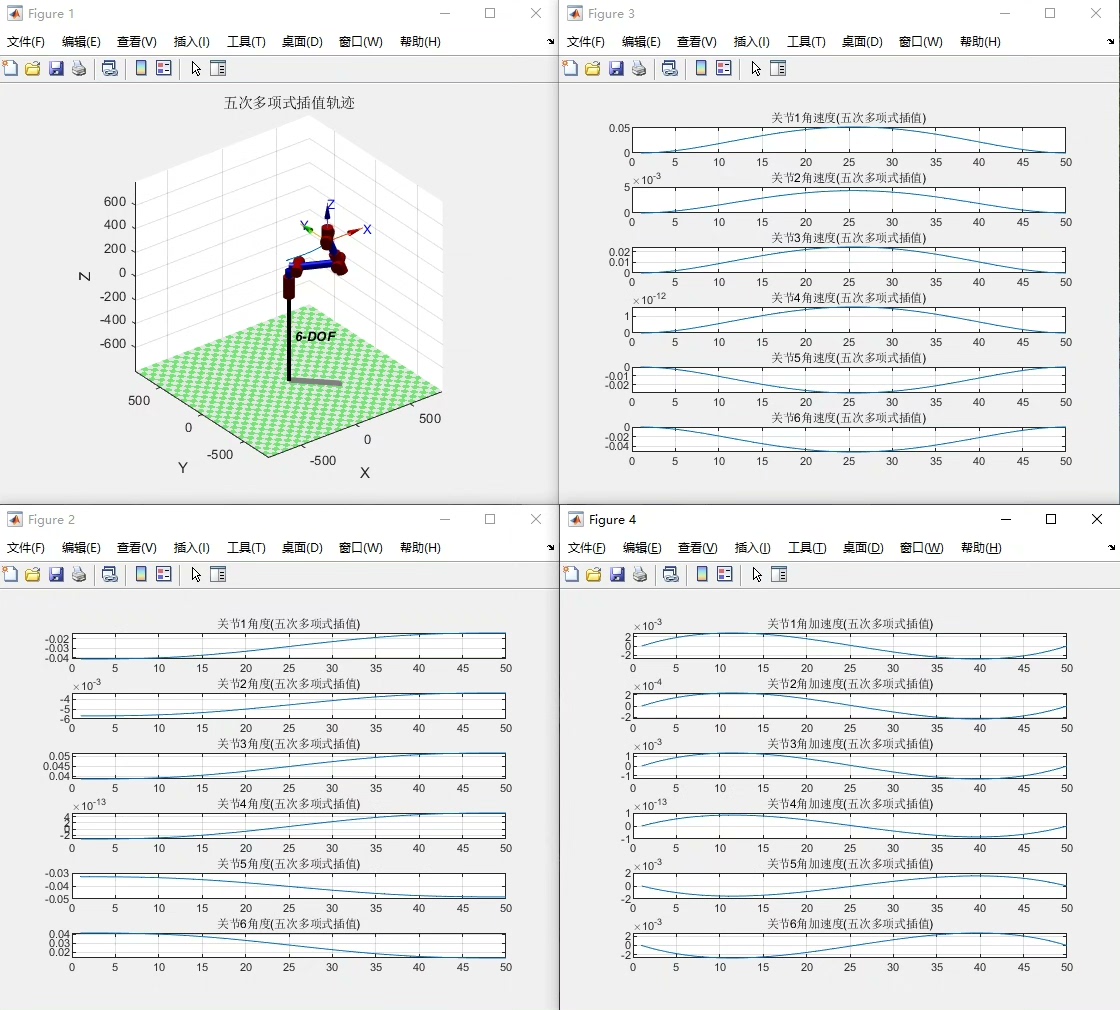
在五次轨迹规划中,我们通常会使用B样条曲线插值来进行平滑过渡。具体步骤如下:
- B样条曲线插值算法实现:使用专业的轨迹规划算法,根据机械臂的运动特性,生成对应的B样条曲线。这个过程需要考虑机械臂的运动范围、约束条件等因素。
- 代码示例:以下是具体的五次轨迹规划代码示例:
# 导入必要的库和模块
import numpy as np # 导入NumPy库进行数值计算
from scipy.interpolate import BSpline # 导入B样条插值模块
from robot_toolbox import trajectory # 从机器人工具箱中导入轨迹规划模块
# 定义机械臂参数和轨迹需求,这里假设有具体的机械臂数据和轨迹需求点集
robot_data = ... # 机械臂数据,包括关节角度、速度等参数
trajectory_points = ... # 轨迹需求点集,如圆弧轨迹上的点等
spline = trajectory.create_spline(trajectory_points) # 根据点集生成B样条曲线插值对象
三套代码示例均展示了在不同应用场景下六自由度机械臂的轨迹规划方法。通过不同的轨迹规划算法和代码实现方式,我们可以更好地满足实际需求,提高机器人的运动精度和灵活性。同时,这些代码示例也提供了足够的灵活性,可以根据实际需要进行修改和扩展。
三套代码适用于各种不同的应用场景,如工业制造、物流配送、装配线控制等。通过这些示例代码,我们可以更好地理解六自由度机械臂的轨迹规划原理和方法,为实际的应用提供参考和帮助。
六自由度机械臂三套代码-三次/五次/七次多项式样条插值曲线、五次B样条曲线插值-2
轨迹规划,圆弧轨迹,机器人工具箱,带源码注释。
起始点、中间点、终止点可自行修改。
(一共三套代码。
机械臂数据可自行安需修改,适合学习)



















 6509
6509

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









