



最近项目用到三菱PLC的网络通讯,终于理解了PLC的以太网通讯时,有个网络端口生存确认,原来是一个非常重要的参数。
生成确认决定了网络参数中模块的初始设置中的对象目标生存期的设置是否生效。具体来说,生存确认设置为“确认”时,对象目标生存期的设置才会生效。这个设置对于网络通信的稳定性和可靠性非常重要,因为它涉及到网络中断后重新连接的行为。如果生存确认设置为“不确认”,那么在通讯过程中如果网络中断,再连通网络后,PLC会认为这个通道一直有客户端的连接,这时只能重启PLC,Socket客户端才能再连接到这个通道上。因此,正确设置生存确认对于确保PLC网络通信的连续性和稳定性至关重要。
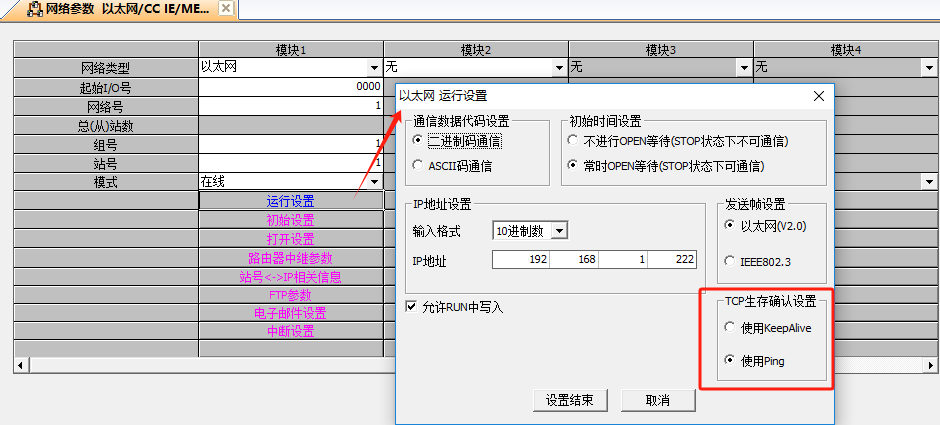
三菱QJ71E71以太网模块中的生成确认设置,像下图选择‘使用Ping’来检查对方客户端的连接是否存在,如果Ping不通则销毁连接,这样客户端才能够重新连接上:
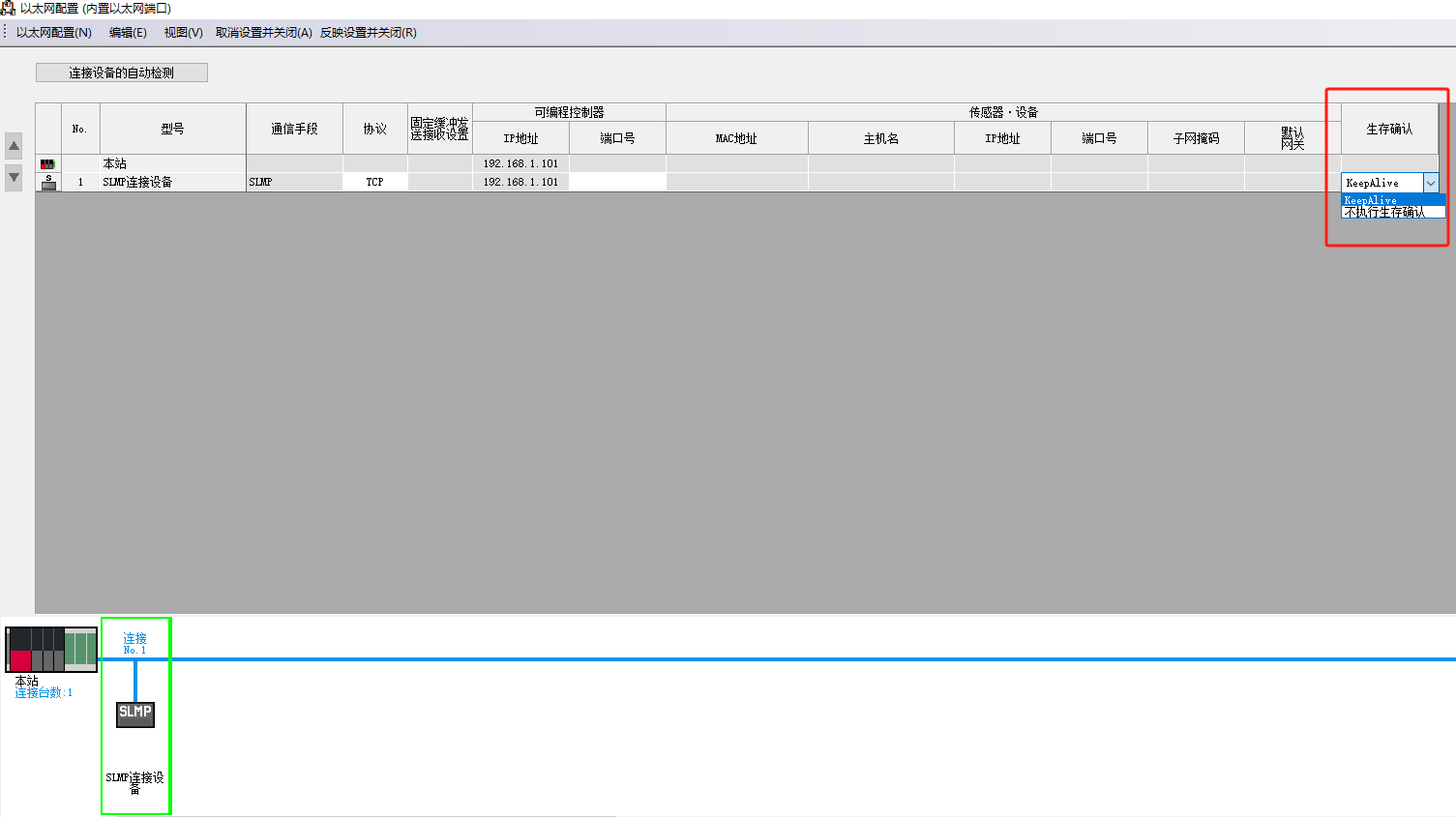
三菱R系列CPU内置以太网通讯的生成确认设置,选择‘KeepAlive’即可:
下面是一个实际的应用,采用IGT-DSER智能网关实现三菱跟西门子PLC之间多对多通讯,配置如下图:
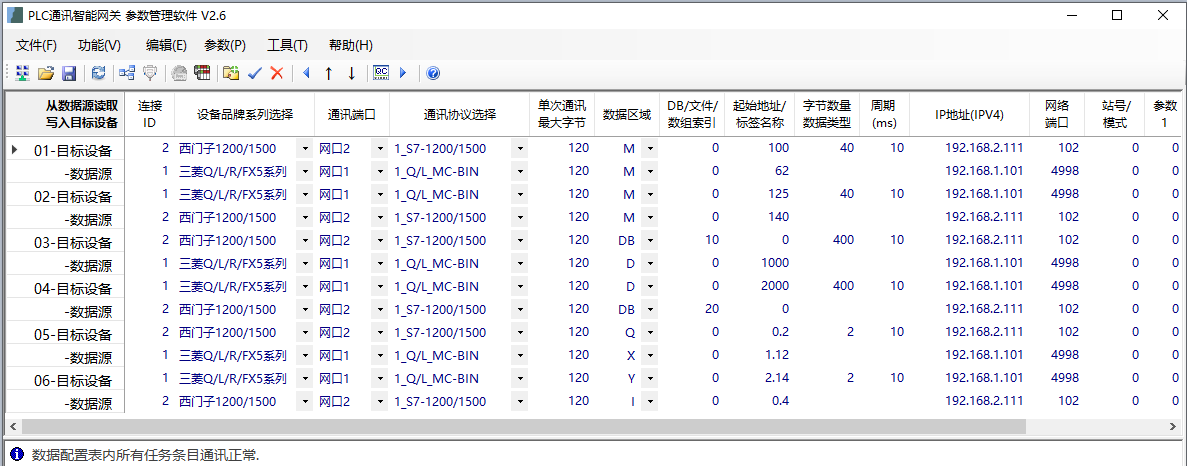
任务1: 读取三菱PLC的M992~M1311(起始地址须要16的倍数,992整除以16等于62),写入西门子PLC的M100.0~M139.7,共40字节;
任务2: 读取西门子PLC的M140.0~M179.7,写入三菱PLC的M2000~M2319(起始地址须要16的倍数,2000整除以16等于125),共40字节;
任务3: 读取三菱PLC的D1000~D1200,写入西门子PLC的DB10.DBW0~DB10.DBW399,共400字节/200字;
任务4: 读取西门子PLC的DB20.DBW0~DB20.DBW399,写入三菱PLC的D2000~D2200,共400字节/200字;
任务5: 读取三菱PLC的X1C(位地址转为10进制,中间加点号),写入西门子PLC的Q0.2,共1个位(BOOL信号);
任务6: 读取西门子PLC的I0.4,写入三菱Y2E(位地址转为10进制,中间加点号),共1个位(BOOL信号);
相关的应用 案例资料下载

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









