




点云是由一组三维空间中的点组成的数据结构,常用于计算机视觉、3D建模和地形图生成等领域。每个点包含空间坐标(x, y, z)以及其他属性(如颜色、密度等)。以下是一些重要的点云概念:
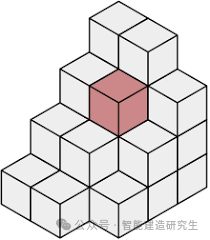
1. 体素 (Voxel)
体素是三维空间中的一个立方体单元,类似于二维图像中的像素。体素化是将点云数据划分为一系列小立方体,每个体素内的点可以用其质心或平均值来表示。体素化有助于减少数据量并保持空间结构。
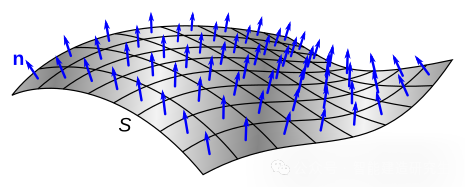
2. 法向量 (Normal Vector)
法向量是指向点云表面垂直的向量,通常用于描述表面方向和形状。计算法向量有助于理解点云的几何结构,广泛应用于3D重建和表面分析。
3. 三角面 (Triangle Mesh)
三角面是由三点连接形成的平面,在点云处理中用于表示表面。通过三角面,可以将点云转换为网格模型,便于进一步处理和分析。

4. 质心 (Centroid)
质心是指一个体素或一组点的中心点,通常通过计算所有点的平均值来确定。在点云处理中,质心用于简化和抽象点云数据。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7701
7701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









