 AI智能体技术架构详解
AI智能体技术架构详解




2025年,似乎成了AI智能体的爆发之年。每天都有新的智能体工作流和模型发布,但在这股热潮背后,你真的能区分简单反射智能体(Simple Reflex Agent)和高级学习智能体(Learning Agent)吗?
AI智能体(AI Agent)是一种能够感知环境、自主决策并采取行动以实现特定目标的软件系统。它由IBM等科技巨头和学术界共同推动发展,核心价值在于将AI从被动工具转变为主动决策者。
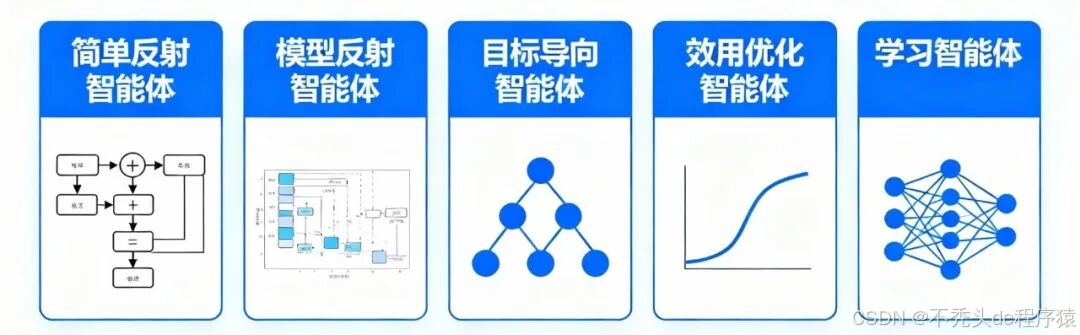
Russell和Norvig在《人工智能:一种现代方法》中提出的智能体分类体系,已成为业界标准,智能体根据其智能水平、决策过程和与环境交互方式的不同,被分为五大核心类型。我们目前普遍讨论的应该属于目标导向智能体,更高层次的智能体结构应该是什么样的呢?
这篇文章将深入剖析这五种智能体的技术架构、应用场景和实现原理,帮助你构建从简单到复杂的AI自动化系统。希望对你有所启发。
PART 01 - 从传统程序到智能体:技术演进的必然
传统软件的困境
传统软件系统本质上是"被动执行者",它们严格按照预定义的规则运行,无法应对环境变化。一个典型的温控系统,当温度低于18°C时启动加热,达到设定温度后关闭——这种硬编码逻辑在复杂场景下暴露出致命缺陷:
适应性差:环境变化时无法调整策略。比如突然开窗导致热量流失,系统仍然按照原有逻辑运作,造成能源浪费。
无记忆能力:每次决策都基于当前状态,无法从历史经验中学习优化。
目标单一:只能完成明确定义的任务,无法处理多目标权衡。比如既要保持温度又要节能时,传统系统无法自主平衡。
智能体架构的技术突破
AI智能体通过引入感知-推理-执行闭环,实现了质的飞跃:
环境(Environment) → 传感器(Sensors) → 感知(Percepts) →
这个架构的核心创新在于:
-
感知层
通过多模态传感器(摄像头、麦克风、传感器)持续监测环境
-
推理层
基于感知数据和内部模型进行决策
-
执行层
通过执行器将决策转化为实际动作
-
反馈机制
动作影响环境,形成新的感知输入,构成闭环
这种架构使得智能体能够:
-
自主感知
实时捕捉环境变化
-
动态决策
根据当前状态和历史经验选择最优行动
-
持续学习
从交互结果中优化决策策略
分类标准的理论基础
Russell和Norvig在《人工智能:一种现代方法》中提出的智能体分类体系,已成为业界标准。该体系基于三个核心维度:
智能程度:从简单的条件反射到复杂的自主学习
内部状态:是否维护世界模型和历史记忆
决策机制:基于规则、基于目标还是基于效用优化
这五种类型——简单反射、模型反射、目标导向、效用优化、学习智能体——构成了从低级到高级的完整技术谱系,每一层都是对前一层能力的扩展和深化。
PART 02 - 五大智能体类型深度解析
技术架构总览
五种智能体类型构成了从基础到高级的完整技术谱系,如下图所示:
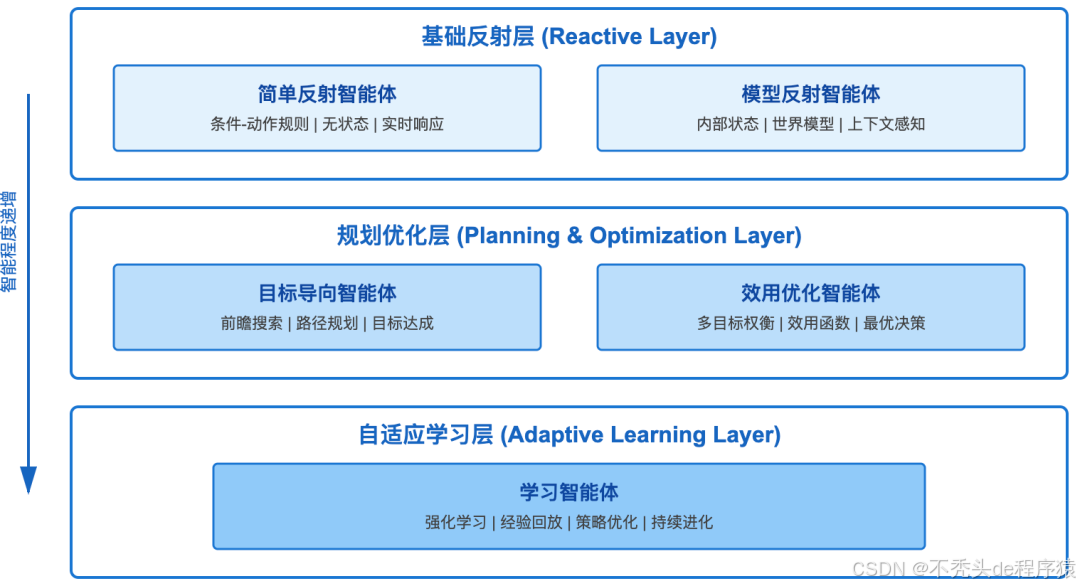
-
基础反射层
:简单反射和模型反射智能体,提供快速响应和状态维护能力
-
规划优化层
:目标导向和效用优化智能体,实现前瞻规划和多目标权衡
-
自适应学习层
:学习智能体,通过经验积累实现持续进化
类型一:简单反射智能体(Simple Reflex Agent)
核心架构:
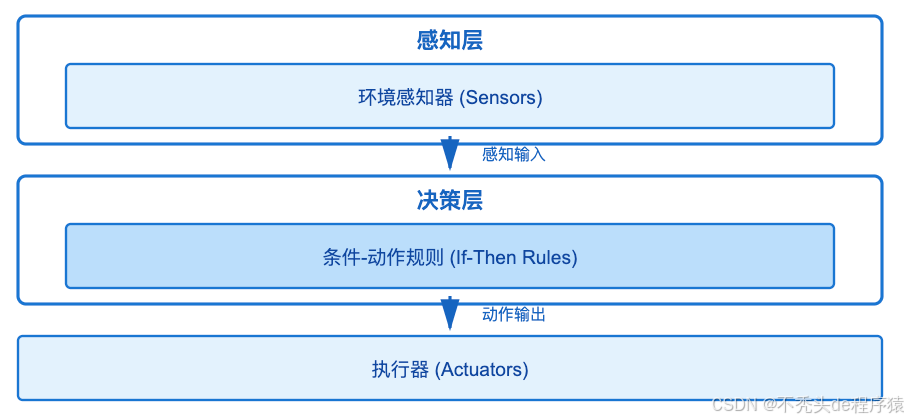
技术特征:
-
无状态设计
:不存储任何历史信息
-
即时响应
:决策延迟通常在毫秒级
-
规则驱动
:“If 温度<18°C Then 启动加热”
-
确定性行为
:相同输入必然产生相同输出
实际案例:
恒温器是最经典的简单反射智能体。它通过温度传感器感知环境,当读数低于设定值时触发加热器,达到目标温度后关闭。这种设计在结构化、可预测的环境中非常高效,但面对动态场景时表现不佳——比如无法预测即将到来的冷空气,也不会记住上次加热的效果。
局限性分析:
由于缺乏记忆和适应能力,简单反射智能体会重复犯错。例如,如果预设规则不完善(比如没有考虑湿度因素),系统将持续做出次优决策,永远无法自我修正。
类型二:模型反射智能体(Model-Based Reflex Agent)
架构升级:
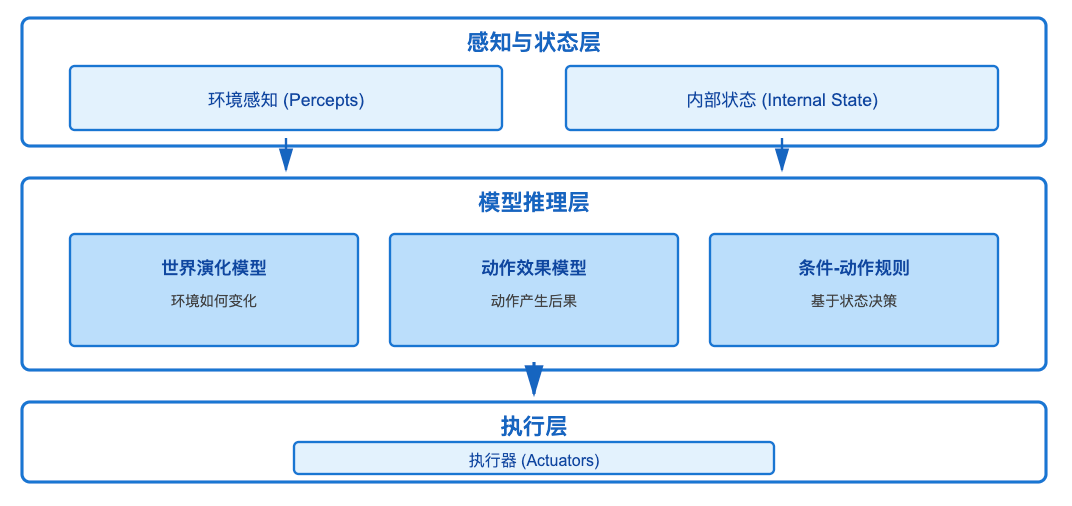
-
内部状态维护
:存储"我在哪里"、“我做过什么”
-
世界模型
:理解"环境如何变化"
-
动作模型
:预测"我的动作会产生什么后果"
技术实现:
以扫地机器人为例,其内部状态包含:
- 已清洁区域地图
- 障碍物位置记录
- 当前电量和位置
决策逻辑变为:“如果我认为当前区域脏且未清洁过,则启动吸尘;如果前方有障碍物,则绕行”。
关键是"我认为"——智能体通过内部模型推理无法直接观测的环境状态。比如转过墙角后,它仍然"记得"墙后的布局,这就是模型推理能力。
对比优势:
| 维度 | 简单反射 | 模型反射 |
|---|---|---|
| 记忆能力 | 无 | 有(内部状态) |
| 推理能力 | 无 | 有(模型预测) |
| 适应性 | 低 | 中 |
| 计算开销 | 极低 | 低-中 |
| 应用场景 | 恒温器、简单传感器 | 扫地机器人、导航系统 |
类型三:目标导向智能体(Goal-Based Agent)
决策范式转变:
从"匹配条件→执行动作"转向"模拟未来→选择路径"

核心机制:
-
目标定义
:“到达地点X”、“完成任务Y”
-
前瞻搜索
:模拟多步动作序列
-
目标检验
:评估未来状态是否满足目标
自动驾驶案例:
目标:“安全到达目的地X”
决策过程:
- 当前状态:主街道,车速60km/h
- 候选动作:左转、直行、右转
- 未来预测:
- 左转 → 进入高速 → 30分钟后到达X ✓ - 直行 → 继续主街 → 45分钟后到达X ✓ - 右转 → 偏离路线 → 无法到达X ✗
- 选择:左转(时间最短且满足目标)
与模型反射的本质区别:
- 模型反射:“当前情况下做什么”(reactive)
- 目标导向:“为了达成目标应该做什么”(proactive)
目标导向智能体具备规划能力,能够牺牲短期利益换取长期目标。
类型四:效用导向智能体(Utility-Based Agent)
优化维度扩展:
不仅问"能否达成目标",更问"哪种方式最优":
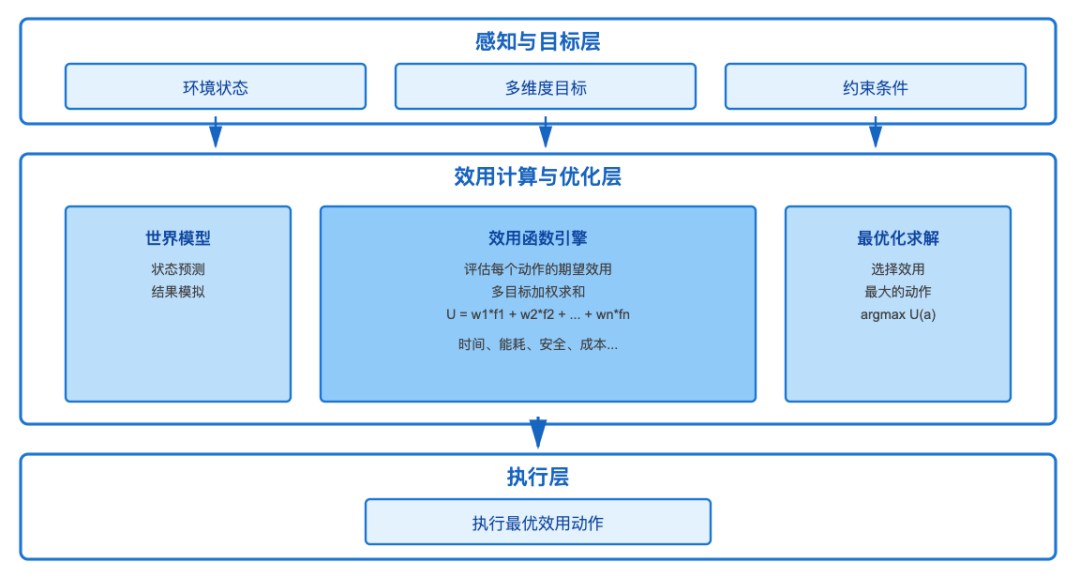
效用函数设计:
# 无人机送货效用函数示例
实战应用:
无人机配送系统需要在多个维度上优化:
-
速度
:客户满意度要求
-
能耗
:电池续航限制
-
安全
:避开人群密集区
-
天气
:规避强风区域
目标导向智能体只会选择"能送达的路径",而效用导向智能体会选择"综合评分最高的路径"——可能稍慢但更安全、更省电。
决策对比:
| 智能体类型 | 送货路径选择逻辑 |
|---|---|
| 目标导向 | 任何能送达的路径都可以 |
| 效用导向 | 选择时间、能耗、安全综合最优的路径 |
技术挑战:
- 效用函数设计需要领域专家知识
- 多目标权重调整需要大量实验
- 计算复杂度随状态空间指数增长
类型五:学习智能体(Learning Agent)
架构革命:
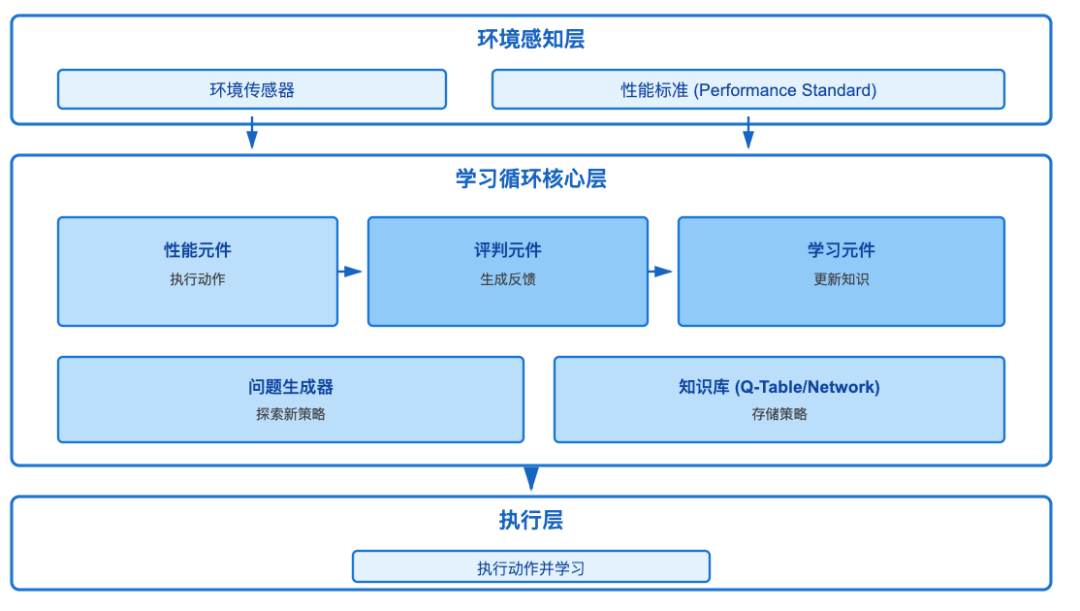
四大核心组件:
1. 性能元件(Performance Element)
- 功能:基于当前知识选择动作
- 类比:棋手根据已学策略下棋
2. 评判元件(Critic)
- 功能:观察动作结果,对比性能标准,生成反馈信号
- 输出:奖励值(+10表示好,-5表示差)
- 类比:教练评价棋手表现
3. 学习元件(Learning Element)
- 功能:根据反馈更新知识库
- 方法:强化学习、深度学习、进化算法
- 类比:棋手总结经验,改进策略
4. 问题生成器(Problem Generator)
- 功能:建议探索未尝试的动作
- 策略:ε-greedy探索、上置信界算法
- 类比:教练建议尝试新开局
AlphaGo案例深度剖析:
性能元件:当前局面下的落子决策网络 评判元件:对局结果(赢+1,输-1) 学习元件:通过数百万局自我对弈,持续优化策略网络参数 问题生成器:在训练中引入随机性,探索非常规下法
关键突破:从零知识到超越人类,完全通过自我博弈学习。
技术实现框架:
# Q-Learning学习智能体简化实现class QLearningAgent: def
学习范式对比:
| 学习类型 | 数据来源 | 典型算法 | 应用场景 |
|---|---|---|---|
| 监督学习 | 标注样本 | 神经网络、决策树 | 图像分类、语音识别 |
| 强化学习 | 环境反馈 | Q-Learning、PPO | 游戏AI、机器人控制 |
| 无监督学习 | 无标注数据 | K-Means、自编码器 | 异常检测、数据聚类 |
局限性:
-
数据密集
:需要海量交互数据
-
训练耗时
:AlphaGo训练数月
-
泛化挑战
:在训练环境外可能失效
-
安全隐患
:探索过程可能产生危险行为
PART 03 - 智能体技术架构深度剖析
感知-推理-执行闭环架构
现代AI智能体的核心架构遵循标准化的三层模型,这种设计源自控制论和认知科学:
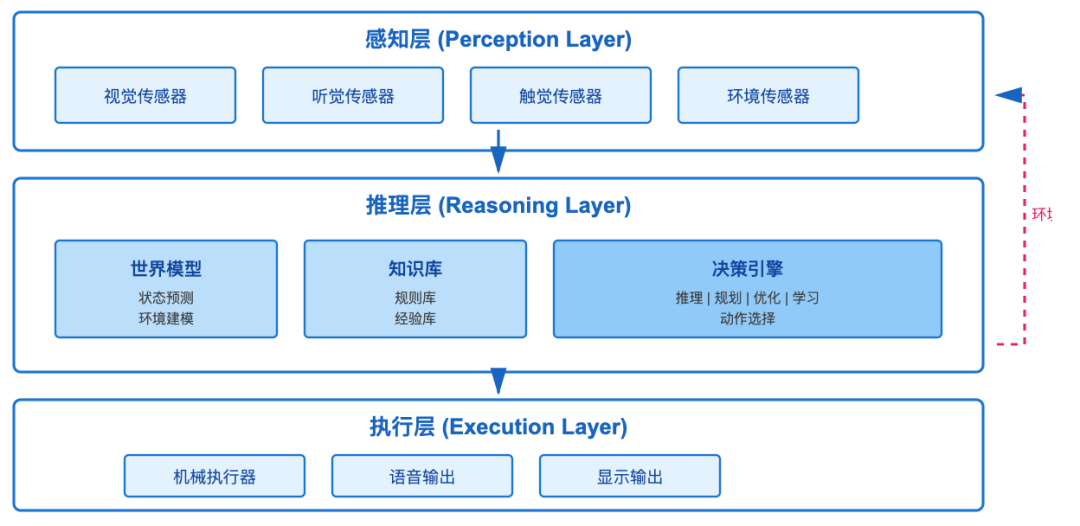
层次职责划分:
感知层:多模态数据融合
- 原始信号采集:图像、声音、温度、位置
- 特征提取:边缘检测、语音识别、异常检测
- 数据预处理:降噪、归一化、时序对齐
- 技术栈:OpenCV、Librosa、传感器驱动
推理层:知识推理与决策
- 世界建模:SLAM地图构建、物理仿真
- 知识表示:知识图谱、规则库、神经网络
- 决策算法:搜索、优化、概率推理
- 技术栈:TensorFlow、PyTorch、规则引擎
执行层:动作生成与控制
- 动作规划:路径规划、任务分解
- 运动控制:PID控制、力反馈
- 多执行器协调:同步控制、冲突解决
- 技术栈:ROS、运动控制库
从单智能体到多智能体系统(MAS)
当多个智能体在共享环境中协同工作时,系统复杂度呈几何级增长:
多智能体架构:
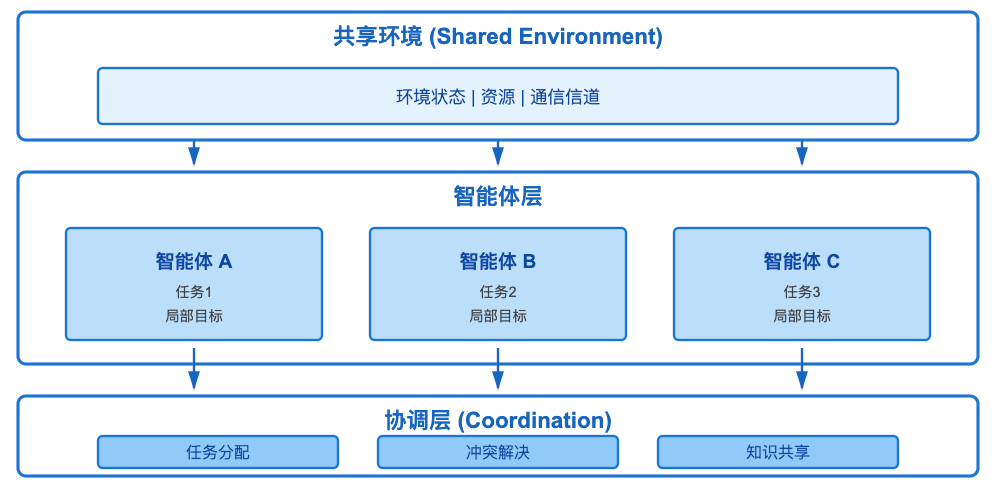
协作模式:
| 模式 | 特征 | 应用案例 |
|---|---|---|
| 竞争型 | 零和博弈,一方得利另一方受损 | 对抗性游戏AI |
| 合作型 | 共同目标,信息完全共享 | 仓库机器人群 |
| 协同型 | 部分合作部分竞争 | 自动驾驶车队 |
典型应用:仓库机器人协同系统
-
场景
20台机器人在同一仓库内拣货
-
挑战
-
路径冲突:两台机器人同时要过窄道
-
任务分配:如何高效分配订单
-
充电调度:避免同时没电
- 解决方案
-
中央调度器:全局路径规划
-
拍卖机制:机器人竞标任务
-
预测性充电:基于任务预测电量需求
与生成式AI的深度融合
2025年最激动人心的趋势:大语言模型(LLM)作为智能体的"认知大脑"
LLM驱动的智能体架构:
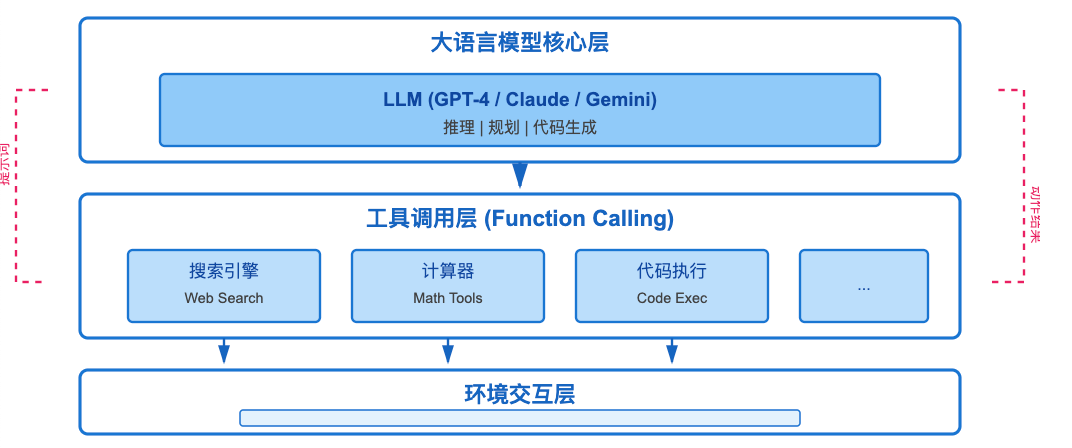
技术突破:
-
推理能力
:思维链(Chain-of-Thought)实现复杂推理
-
工具使用
:LLM学会调用外部API和工具
-
自然交互
:用户可用自然语言指挥智能体
-
快速适应
:通过Few-shot Learning快速掌握新任务
AutoGPT类智能体工作流程:
- 用户输入目标:“调研竞品并生成分析报告”
- LLM分解任务:
- 子任务1:搜索竞品信息 - 子任务2:提取关键数据 - 子任务3:对比分析 - 子任务4:生成报告
- 自主执行:
- 调用搜索API - 调用数据提取工具 - 内部分析推理 - 调用文档生成工具
- 结果验证与迭代优化
PART 04 - 技术选型与对比分析
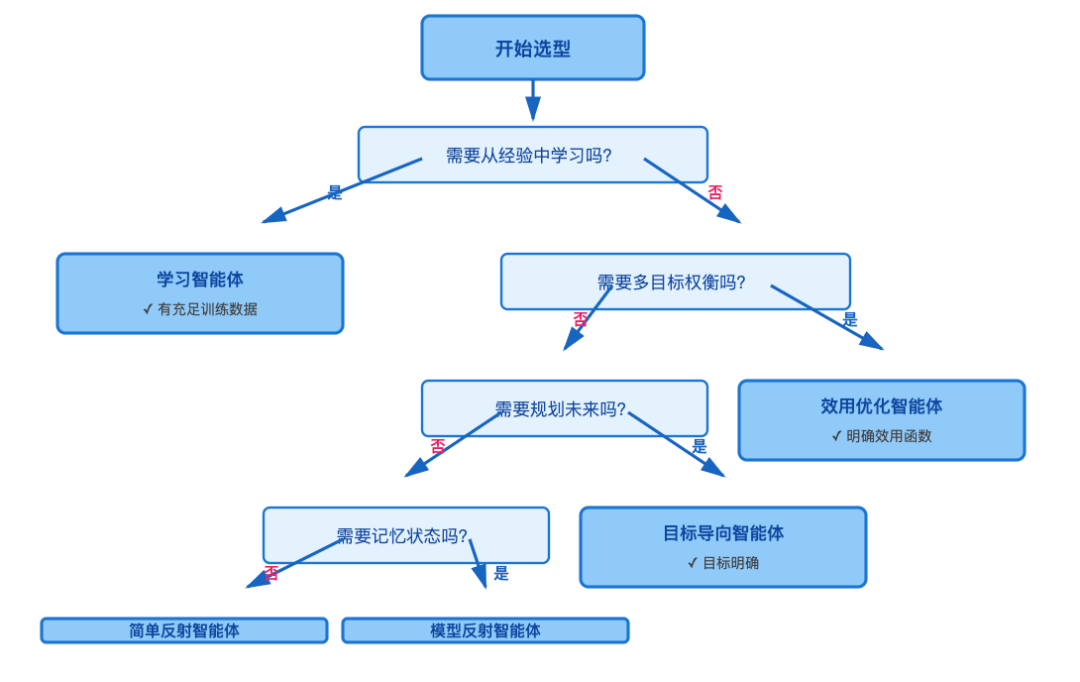
五大智能体类型选型决策树
性能对比矩阵
| 维度 | 简单反射 | 模型反射 | 目标导向 | 效用优化 | 学习智能体 |
|---|---|---|---|---|---|
| 响应延迟 | <1ms | <10ms | 10-100ms | 100ms-1s | 变化大 |
| 内存占用 | 极小(<1MB) | 小(1-10MB) | 中(10-100MB) | 大(100MB-1GB) | 极大(>1GB) |
| 适应性 | 无 | 低 | 中 | 中 | 高 |
| 可解释性 | 高 | 高 | 中 | 低 | 极低 |
| 开发成本 | 低 | 中 | 中高 | 高 | 极高 |
| 维护成本 | 低 | 中 | 中 | 中高 | 高 |
结论
我们系统地解析了AI智能体从简单到复杂的五大类型——简单反射、模型反射、目标导向、效用优化和学习智能体。每种类型都有其适用场景和技术特点:简单反射以极低延迟响应确定性环境,模型反射通过内部状态维护增强适应性,目标导向引入规划能力,效用优化实现多目标权衡,学习智能体则具备从经验中自我进化的能力。
2025年,随着大语言模型的深度融合和多智能体系统的成熟,AI智能体正在从实验室走向大规模商业应用。从自动驾驶到智能客服,从工业质检到金融交易,智能体技术正在重塑各行各业的自动化范式。但我们也必须清醒认识到,当前智能体仍需要"人类在回路"——人类监督仍是确保系统安全可靠的最后防线。
技术选型时,需要平衡性能需求、成本预算和开发周期。渐进式演进比激进跃迁更稳妥,从解决80%标准场景的简单智能体开始,逐步升级到处理边缘情况的学习系统。
未来3-5年,我们将见证可信赖AI、小样本学习、安全约束学习等关键技术的突破。智能体不再只是自动化工具,而是能够自主理解需求、规划任务、协同工作的数字化劳动力。这要求开发者不仅要掌握强化学习算法,更要建立系统工程思维——如何设计奖励函数、如何保障安全边界、如何实现人机协作。
记住:智能体技术的终极目标不是取代人类,而是增强人类能力,让我们专注于更具创造性的工作。
普通人如何抓住AI大模型的风口?
领取方式在文末
为什么要学习大模型?
目前AI大模型的技术岗位与能力培养随着人工智能技术的迅速发展和应用 , 大模型作为其中的重要组成部分 , 正逐渐成为推动人工智能发展的重要引擎 。大模型以其强大的数据处理和模式识别能力, 广泛应用于自然语言处理 、计算机视觉 、 智能推荐等领域 ,为各行各业带来了革命性的改变和机遇 。
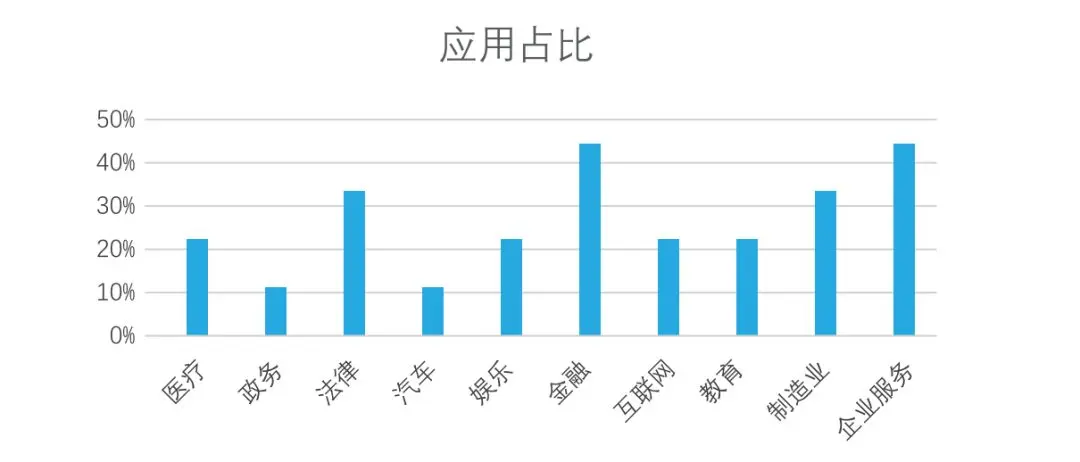
目前,开源人工智能大模型已应用于医疗、政务、法律、汽车、娱乐、金融、互联网、教育、制造业、企业服务等多个场景,其中,应用于金融、企业服务、制造业和法律领域的大模型在本次调研中占比超过 30%。
随着AI大模型技术的迅速发展,相关岗位的需求也日益增加。大模型产业链催生了一批高薪新职业:

人工智能大潮已来,不加入就可能被淘汰。如果你是技术人,尤其是互联网从业者,现在就开始学习AI大模型技术,真的是给你的人生一个重要建议!
最后
只要你真心想学习AI大模型技术,这份精心整理的学习资料我愿意无偿分享给你,但是想学技术去乱搞的人别来找我!
在当前这个人工智能高速发展的时代,AI大模型正在深刻改变各行各业。我国对高水平AI人才的需求也日益增长,真正懂技术、能落地的人才依旧紧缺。我也希望通过这份资料,能够帮助更多有志于AI领域的朋友入门并深入学习。
真诚无偿分享!!!
vx扫描下方二维码即可
加上后会一个个给大家发
大模型全套学习资料展示
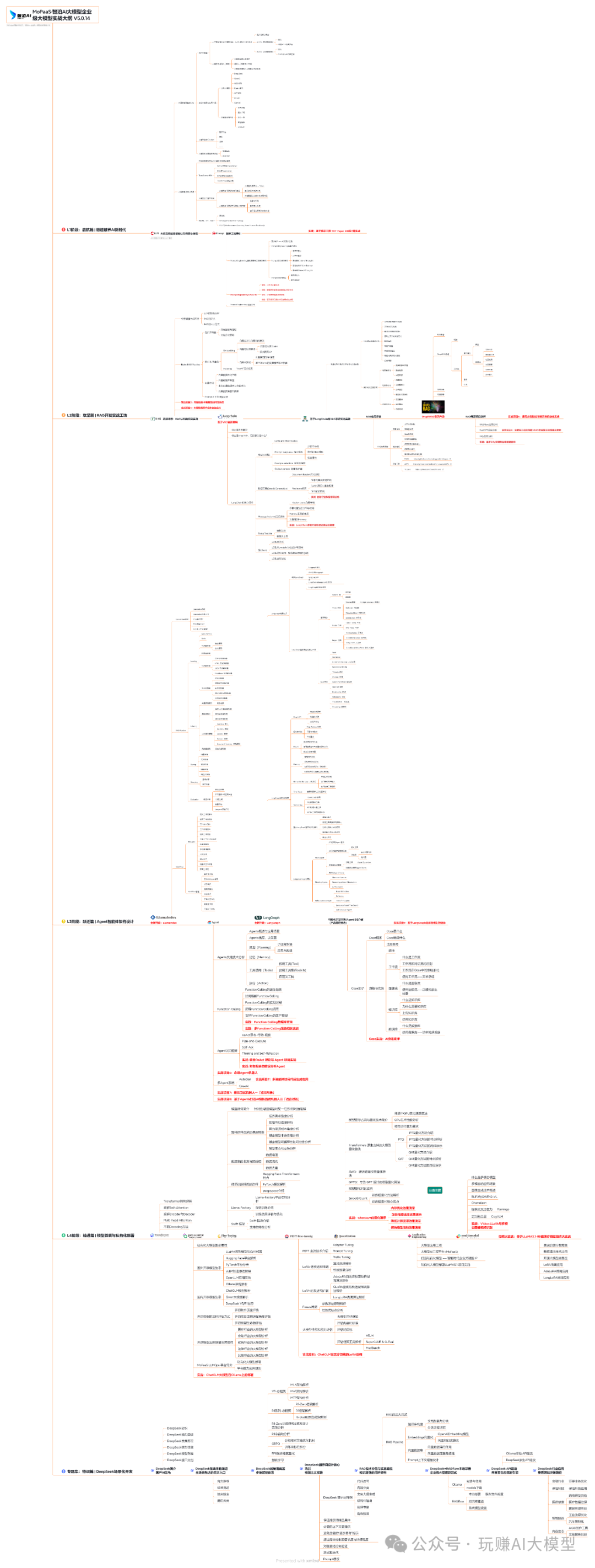
自我们与MoPaaS魔泊云合作以来,我们不断打磨课程体系与技术内容,在细节上精益求精,同时在技术层面也新增了许多前沿且实用的内容,力求为大家带来更系统、更实战、更落地的大模型学习体验。
希望这份系统、实用的大模型学习路径,能够帮助你从零入门,进阶到实战,真正掌握AI时代的核心技能!
01 教学内容
-
从零到精通完整闭环:【基础理论 →RAG开发 → Agent设计 → 模型微调与私有化部署调→热门技术】5大模块,内容比传统教材更贴近企业实战!
-
大量真实项目案例: 带你亲自上手搞数据清洗、模型调优这些硬核操作,把课本知识变成真本事!
02适学人群
应届毕业生: 无工作经验但想要系统学习AI大模型技术,期待通过实战项目掌握核心技术。
零基础转型: 非技术背景但关注AI应用场景,计划通过低代码工具实现“AI+行业”跨界。
业务赋能突破瓶颈: 传统开发者(Java/前端等)学习Transformer架构与LangChain框架,向AI全栈工程师转型。
vx扫描下方二维码即可
本教程比较珍贵,仅限大家自行学习,不要传播!更严禁商用!
03 入门到进阶学习路线图
大模型学习路线图,整体分为5个大的阶段:
04 视频和书籍PDF合集
从0到掌握主流大模型技术视频教程(涵盖模型训练、微调、RAG、LangChain、Agent开发等实战方向)
新手必备的大模型学习PDF书单来了!全是硬核知识,帮你少走弯路(不吹牛,真有用)

05 行业报告+白皮书合集
收集70+报告与白皮书,了解行业最新动态!

06 90+份面试题/经验
AI大模型岗位面试经验总结(谁学技术不是为了赚$呢,找个好的岗位很重要)
07 deepseek部署包+技巧大全
由于篇幅有限
只展示部分资料
并且还在持续更新中…
真诚无偿分享!!!
vx扫描下方二维码即可
加上后会一个个给大家发

















 673
673

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









