




根据 Additive Manufacturing Research 的《增材制造后处理:市场分析与预测》报告,预计到2031年,金属后处理收入将达到14亿美元。这不仅仅是因为CNC加工等现有技术将越来越精细化和自动化,而且还需要开发新的后处理方法。
电化学加工利用电化学反应对金属材料进行加工的方法。与机械加工相比,电化学加工不受材料硬度、韧性的限制,已广泛用于工业生产中,可能为3D打印零件提供独特的优势。
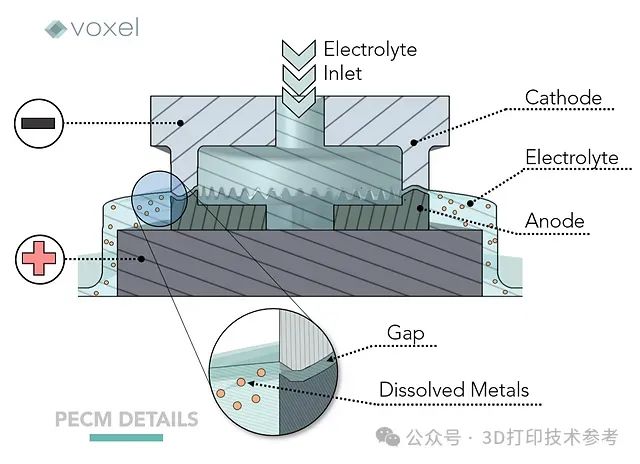
脉冲电化学加工的工作原理是在零件上创建一个形状与所需几何图形相反的自定义工具。该工具在没有物理接触的情况下靠近工件,保持微小的电极间间隙。然后,带电的电解液通过该间隙,起到双重作用:它催化电化学加工反应,有效的将工件材料溶解在特定的几何形状中,同时冲洗掉产生的金属氢氧化物。这个过程,可以被描述为“电和化学逐个原子的去除金属”,不会产生摩擦,从而避免了热变形或工具振动。
因为不必担心热变形或工具振动,该工艺可以获得严格公差和薄壁特征。此外,该工艺不需要接触,产生的热量少,大大减少了工具磨损,因此能够处理更大的零件,而不用担心工具磨损或变形。
然而,对定制工具的需求带来了一个缺点,通常会导致更高的成本投入,并使该过程更适合大批量生产。尽管有这种限制,脉冲电化学加工对复杂的几何形状、高硬度材料和大批量材料加工特别有效。

由于脉冲电化学加工要求端部由导电材料制成,因此不适用于塑料和聚合物。然而,该技术对材料硬度并无关联,允许加工镍基超合金等具有挑战性的金属。这种特性在传统加工方法难以解决材料硬度或复杂性的行业中尤其有益。
如果需要处理零件很少,形状很规则,电化学处理显然不是最佳选项。这项工艺适合于处理几何形状复杂、公差更严格、零件尺寸特别大的零件。如果涉及上述两个方面,该工艺更有可能是一个很好的选择。

电化学加工与金属增材制造存在潜在交叉点,该工艺可以平滑层纹并提高表面质量,特别是在难以到达的区域或薄壁内表面。
Voxel Innovations公司对3D打印的铬镍铁合金涡轮叶片进行了研究。其使用 脉冲电化学加工作为二次加工工艺,使叶片更薄,并作为精加工工艺,提高零件的表面质量,包括下蒙皮区域。
随着增材制造朝着更大批量的方向发展,电化学加工可能会变得越来越重要,该工艺能够使用单个工具来处理多个零件或特征。其在大批量生产方面表现出色,不仅可以一次形成零件的整个表面,而且该过程还可以并行使用,在一次操作中并排处理数十个零件或特征。采用这种方式,Voxel公司每年能够加工数百万个零件。
注:本文内容由3D打印技术参考整理编辑,转载请点击转载须知。
欢迎转发
主编微信:2396747576(请注明身份); 硕博千人交流Q群:248112776;网址:www.amreference.com
延伸阅读:
4.大连理工:激光定向能量沉积法制备熔体自生氧化铝/钛酸铝的开裂机理研究



















 1248
1248

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









