




文章目录
一. 源码及框架分析
1.决定搜索类型的传参
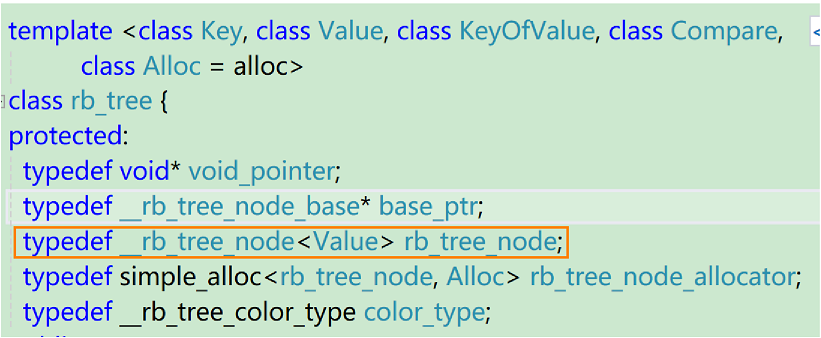
1.这是rb_tree主要成员变量,可以看出,rb_tree是实现单个Key还是pair型,节点的类型并不是写死的,而是由第二个参数Value决定,这样即可以实现Key搜索场景的set,又可以实现Key/Value场景的map
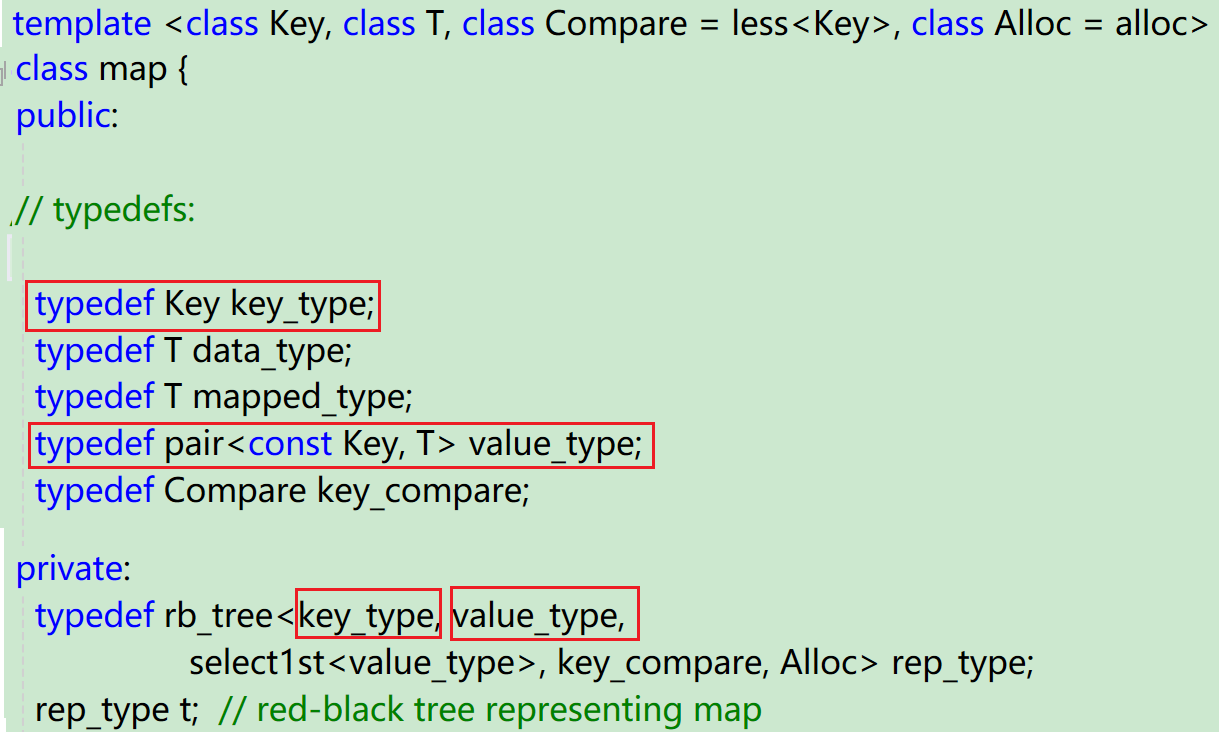
2. 这是map的主要成员变量,从这里可以看出map在复用rb_tree时,第二个参数传的是pair型
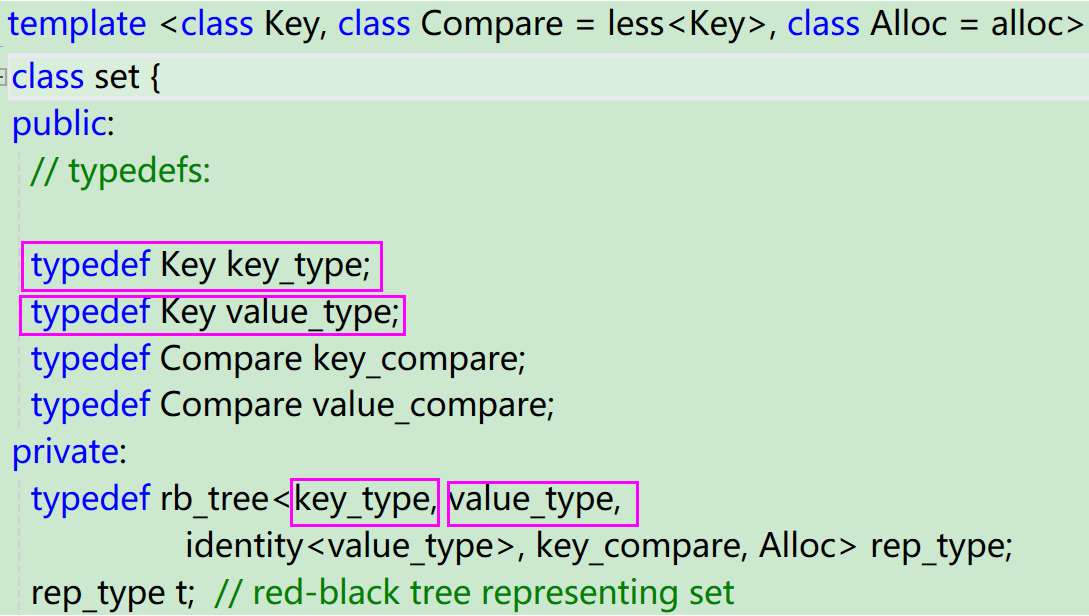
3. 这是set的主要成员变量,从这里可以看出set在复用rb_tree时,第一个和第二个参数传的是Key型
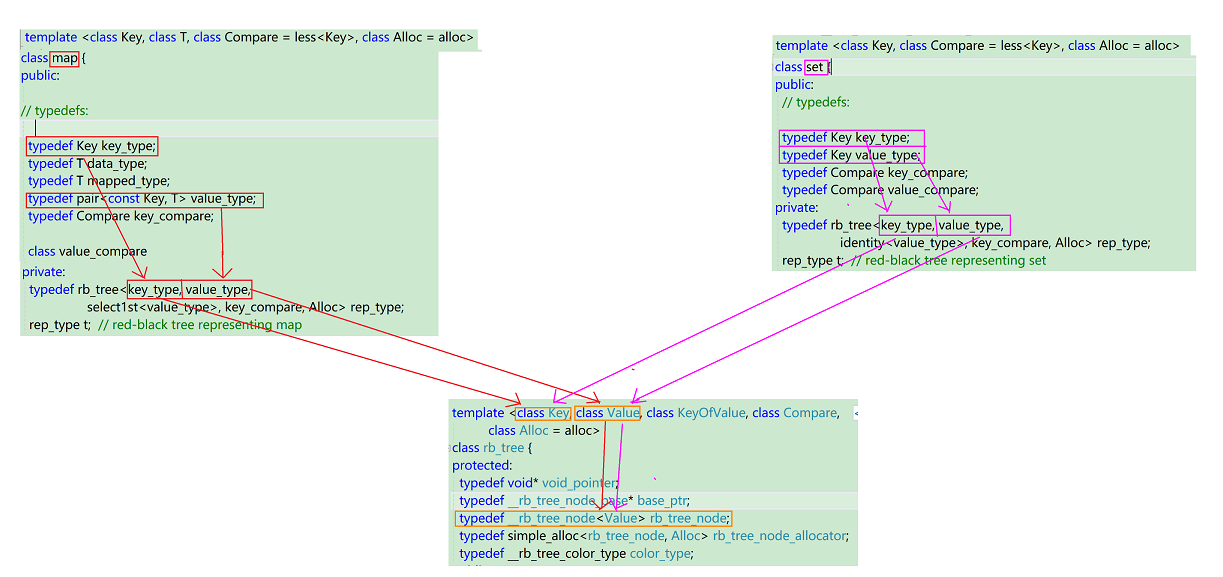
思考:为什么要传第一个参数
思考:既然第二个参数决定节点的存储类型,为什么还要再传第一个参数Key呢?
第一个参数Key是给find/erase等函数做形参类型的,对于set,两个参数一样,但对于map,insert的是pair型,find/erase的是Key型。
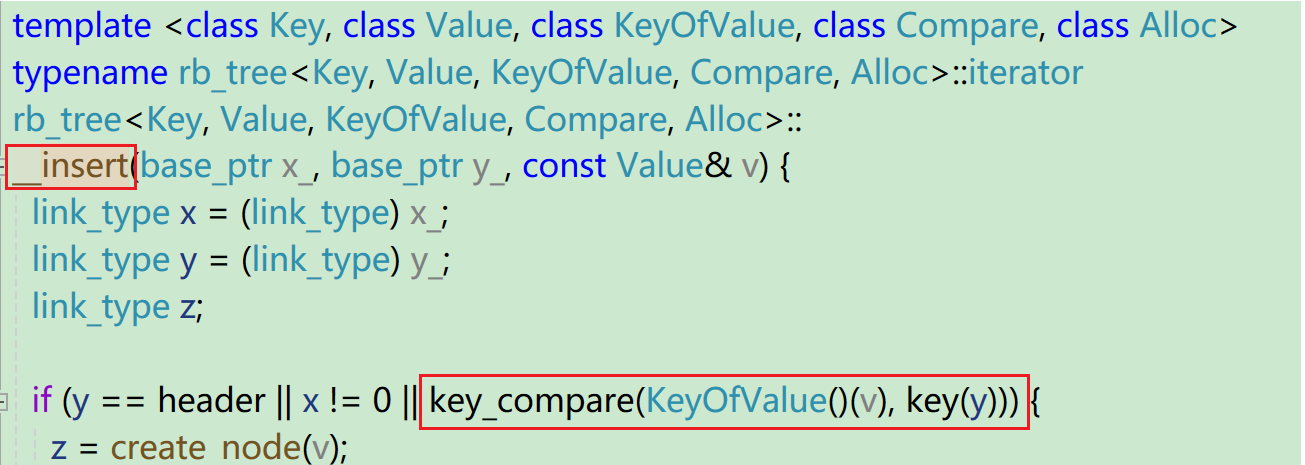
2.KeyOfValue的作用
在rb_tree内,并不知道Value是一个Key值还是pair,在进行插入比较时,需要比较的是Key,而KeyOfValue可以提取出来相比较的两个数据的Key值,可以在map和set调用rb_tree时传入KeyOfValue的方法
源码是通过std::select1st和std:: identity来实现的,这里我改成了在map和set层实现KOV_M和KOV_S的仿函数传给rb_tree,同样也能实现提取Key的效果,具体看下面的代码实现

二. 模拟实现map和set
1. 实现出复用红黑树框架,并支持insert
参照源码,红黑树的第二个参数决定存储的数据类型,这里就需要对原来实现的红黑树做一下调整
【1】在实现insert时,对比节点大小要用map和set层提供的KeyOfValue来提取出要比较的值
【2】为了支持map的实现,返回值改为pair型,pair的一个参数为插入节点的迭代器,第二个节点为是否成功插入
rb_tree基本结构
//////rb_tree
template <class K, class V,class KeyOfValue,class Compare=std::less<K>>
class RBTree
{
public:
typedef RBTreeNode<V> Node;
typedef RBTreeIterator<V, V&, V*> Iterator;
typedef RBTreeIterator<V, const V&, const V*> ConstIterator;
std::pair<Iterator,bool> Insert(const V& value);
Node* _root=nullptr;
Iterator Find(K& key);
private:
Node* _root=nullptr;
void RorateRL(Node* root);
void RorateLR(Node* root);
void RorateR(Node* root);
void RorateL(Node* root);
};
insert实现
template <class K, class V, class KeyOfValue, class Compare>
std::pair<RBTreeIterator<V, V&, V*>, bool> RBTree < K,V, KeyOfValue,Compare>::Insert(const V& value)
{
if (_root == nullptr)
{
_root = new Node(value);
_root->_color = RBTreeBlack;
return { {_root,_root},true };
}
Node* parent = nullptr;
Node* cur = _root;
//二叉树规则插入
KeyOfValue kov;
Compare com;
while (cur)
{
// if (cur->_kv.first < kv.first)
if(kov(value)==kov(cur->_value))
return { {cur,_root},true };
if( com( kov(cur->_value),kov(value) ) )
{
parent = cur; cur = cur->_right;
}
//else if (cur->_kv.first > kv.first)
else if ( com( kov(value), kov(cur->_value) ) )
{
parent = cur; cur = cur->_left;
}
}
cur = new Node(value);
//判断新增节点使父节点左还是右
//if (parent->_value.first < value.first)
if(com(kov(parent->_value),kov(value)))
parent->_right = cur;
else
parent->_left = cur;
cur->_parent = parent;
while (parent && parent->_color == RBTreeRed)
{
Node* grandfather = parent->_parent;
// g
//p u
//p为g的左代码实现
if (parent == grandfather->_left)
{
Node* uncle = grandfather->_right;
// u存在且为红,p和u变黑,g变红,改变cur和p的指向,继续向上变;
if (uncle && uncle->_color == RBTreeRed)
{
parent->_color = uncle->_color = RBTreeBlack;
grandfather->_color = RBTreeRed;
cur = grandfather;
parent = grandfather->_parent;
}
// u不存在或存在且为黑
else
{
// g
// p u
// c
//单旋加变色,c为p的左, p变成新的根,p变黑,g变红
if (cur == parent->_left)
{
RorateR(grandfather);
parent->_color = RBTreeBlack;
grandfather->_color = RBTreeRed;
}
// g
// p u
// c
//双旋加变色,c为p的右,
else
{
RorateLR(grandfather);
cur->_color = RBTreeBlack;
grandfather->_color = RBTreeRed;
}
}
return { {cur,_root},true };
}
else
{ //这里是p为g的情
}
return { {cur,_root},true };
}
return { {cur,_root},true };
}
}
封装map
////my_map
template<class K, class V>
class KOV_M
{
public:
K operator()(const std::pair<K, V> data)
{
return data.first;
}
};
template<class K, class V, class Compare = std::less<K>>
class map
{
public:
typedef typename RBTree<K, std::pair<K, V>, KOV_M<K, V>>::Iterator iterator;
typedef typename RBTree< K, std::pair<K, V>, KOV_M<K, V>>::ConstIterator const_iterator;
std::pair<iterator, bool> insert(const std::pair<K, V>& p)
{
return _tree.Insert(p);
}
private:
RBTree<K, std::pair<K, V>, KOV_M<K,V>> _tree;
};
封装set
template<class V>
class KOV_S
{
public:
V operator()(const V& data)
{
return data;
}
};
template< class V, class Compare =std:: less<V>>
class set
{
public:
std::pair<iterator, bool> insert(int value)
{
return _tree.Insert(value);
}
private:
RBTree<V,V, KOV_S<V>> _tree;
};
2. 支持iterator的实现
参照源码,需要实现iterator的++和–等操作,
iterator实现思路分析
- 整体思路和list的iterator类似,用类封装节点的指针,然后通过重载运算符,使迭代器实现像指针一样的行为
- map和set的迭代器走的是中序遍历,这样才能有序,所以在++和–操作时就要遵循中序遍历的规则
- 支持->等运算符是为了封装map时支持 [ ] 操作
【iterator++操作实现详解】
- 如果cur的右子树不为空,根据二叉树的规则,它的右子树的最左节点就是他的下一个节点,
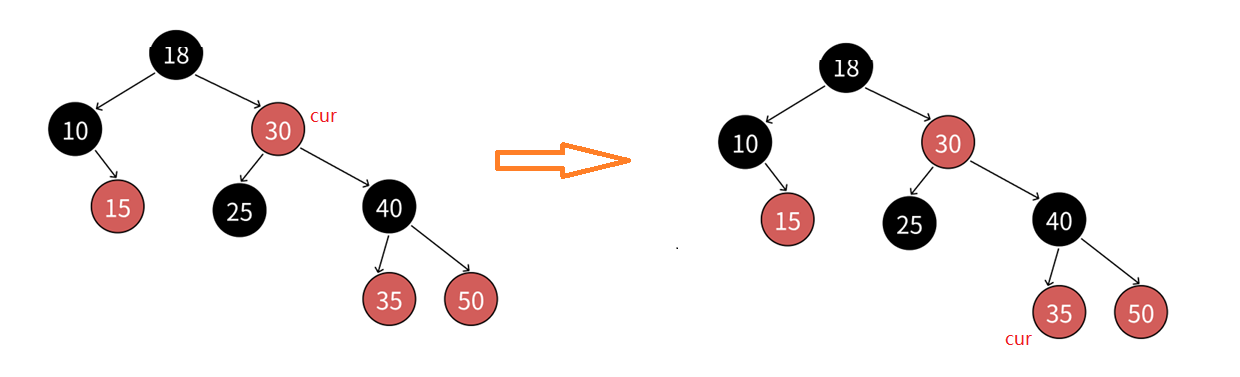
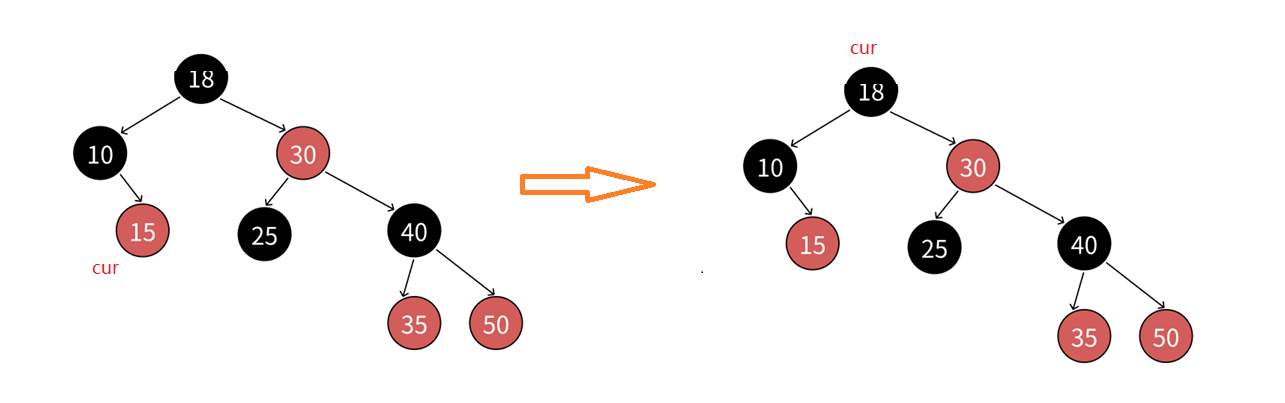
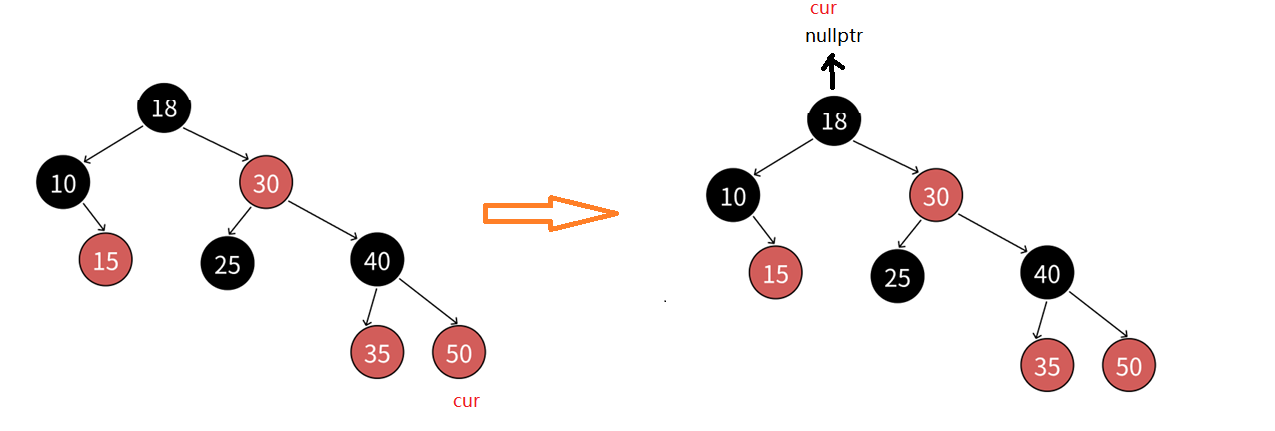
2. 如果cur的右子树为空,就代表以cur为根的树已经走完了,接下来就要分成两种情况来讨论
【1】cur为父节点的左节点,++操作就是走到cur的父节点
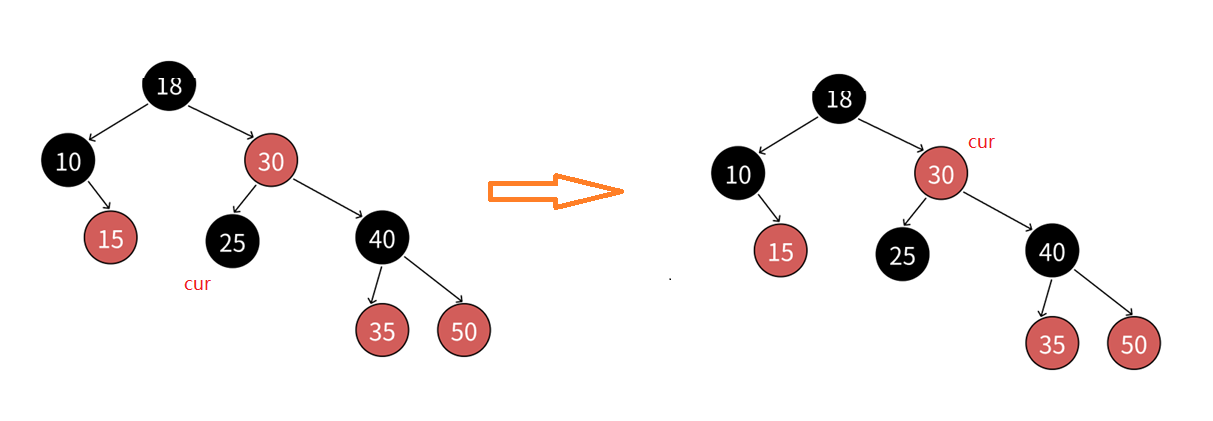
【2】cur为父节点的右节点,这种情况就是以cur的父节点为根的树走完了,需要一直向上更新,直到遇到一个节点是父节点左节点或者走到终点
这里关于end()的实现,源码中是设置了一个哨兵位头节点,它和根互为父节点,左指向最左,右指向最右,这里我用空节点实现的end(),可以实现和源码同样的功能,但在–end()时需要特殊处理一下,让迭代器指向最右节点,具体看–的代码实现
template<class V, class Ref, class Ptr>
class RBTreeIterator
{
public:
typedef RBTreeNode<V> Node;
//typedef RBTreeIterator<V, V&, V*> Iterator;
//typedef RBTreeIterator<V, const V&, const V*> ConstIterator;
typedef RBTreeIterator<V, Ref, Ptr> Self;
RBTreeIterator(){}
RBTreeIterator(Node* node,Node* root) :_node(node), _root(root)
{}
void increment()
{
if (_node->_right != nullptr)
{
_node = _node->_right;
while (_node->_left != nullptr)
_node = _node->_left;
}
else
{
Node* p = _node->_parent;
if (_node == p->_left)
_node = p;
else
{
while (p != nullptr && _node == p->_right)
{
_node = p;
p = p->_parent;
}
if (p == nullptr)
_node = nullptr;
}
}
}
void decrement()
{
if (_node->_left != nullptr)
{
_node = _node->_left;
while (_node->_right != nullptr)
_node = _node->_right;
}
else
{
Node* p = _node->_parent;
while (p != nullptr && _node == p->_left)
{
_node = p;
p = p->_parent;
}
_node = p;
}
}
Node* rightMost()
{
Node* RightMost = _root;
while (RightMost != nullptr && RightMost->_right != nullptr)
RightMost = RightMost->_right;
return RightMost;
}
Self& operator++()
{
increment();
return *this;
}
Self operator++(int)
{
Self tmp = *this;
increment();
return tmp;
}
Self& operator--()
{
if (_node == nullptr)
_node = rightMost();
else
decrement();
return *this;
}
Self operator--(int)
{
Self tmp = *this;
if (_node == nullptr)
_node = rightMost();
else
decrement();
return tmp;
}
bool operator==(Self& y)
{
return _node == y._node;
}
bool operator!=(Self& y)
{
return _node != y._node;
}
Ref operator*()
{
return _node->_value;
}
Ptr operator->()
{
return &_node->_value;
}
public:
Node* _node;
Node* _root;
};
3.支持map的[ ]操作
有了insert的实现,实现[]就很简单了,可以复用insert代码,而在这里先前iterator支持的->操作也派上用场了,用来返回pair的第二个参数,具体看代码
4.map和set代码实现
//map
namespace kzz
{
template<class K, class V>
class KOV_M
{
public:
K operator()(const std::pair<K, V> data)
{
return data.first;
}
};
template<class K, class V, class Compare = std::less<K>>
class map
{
public:
typedef typename RBTree<K, std::pair<K, V>, KOV_M<K, V>>::Iterator iterator;
typedef typename RBTree< K, std::pair<K, V>, KOV_M<K, V>>::ConstIterator const_iterator;
std::pair<iterator, bool> insert(const std::pair<K, V>& p)
{
return _tree.Insert(p);
}
iterator begin()
{
return _tree.Begin();
}
iterator end()
{
return _tree.End();
}
const_iterator begin()const
{
return _tree.Begin();
}
const_iterator end()const
{
return _tree.End();
}
iterator find(K& key)
{
_tree.Find(key);
}
V& operator[](const K& key)
{
std::pair<iterator,bool> ret= _tree.Insert( std::pair<K,V>(key,V()) );
return ret.first->second;
}
private:
RBTree<K, std::pair< K, V>, KOV_M<K,V>> _tree;
};
}
//set
namespace kzz
{
template<class V>
class KOV_S
{
public:
V operator()(const V& data)
{
return data;
}
};
template< class V, class Compare =std:: less<V>>
class set
{
public:
typedef typename RBTree<V, const V, KOV_S<V>>::Iterator iterator;
typedef typename RBTree<V, const V, KOV_S<V>>::ConstIterator const_iterator;
std::pair<iterator, bool> insert(int value)
{
return _tree.Insert(value);
}
iterator begin()
{
return _tree.Begin();
}
iterator end()
{
return _tree.End();
}
const_iterator begin()const
{
return _tree.Begin();
}
const_iterator end()const
{
return _tree.End();
}
iterator find(K& key)
{
_tree.Find(key);
}
private:
RBTree<V,const V, KOV_S<V>> _tree;
};
}
//rb_tree
template <class K, class V,class KeyOfValue,class Compare=std::less<K>>
class RBTree
{
public:
typedef RBTreeNode<V> Node;
typedef RBTreeIterator<V, V&, V*> Iterator;
typedef RBTreeIterator<V, const V&, const V*> ConstIterator;
std::pair<Iterator,bool> Insert(const V& value);
Iterator End()
{
return Iterator(nullptr, _root);
}
Iterator Begin()
{
Node* leftMost = _root;
while (leftMost && leftMost->_left)
{
leftMost = leftMost->_left;
}
return Iterator(leftMost, _root);
}
ConstIterator End()const
{
return ConstIterator(nullptr, _root);
}
ConstIterator Begin()const
{
Node* leftMost = _root;
while (leftMost && leftMost->_left)
{
leftMost = leftMost->_left;
}
return ConstIterator(leftMost, _root);
}
public:
Iterator Find(K& key);
Node* _root=nullptr;
void RorateRL(Node* root);
void RorateLR(Node* root);
void RorateR(Node* root);
void RorateL(Node* root);
bool IsBanlance(Node* root);
bool check(Node* root,int count,const int blackNum);
};

















 1248
1248

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









