






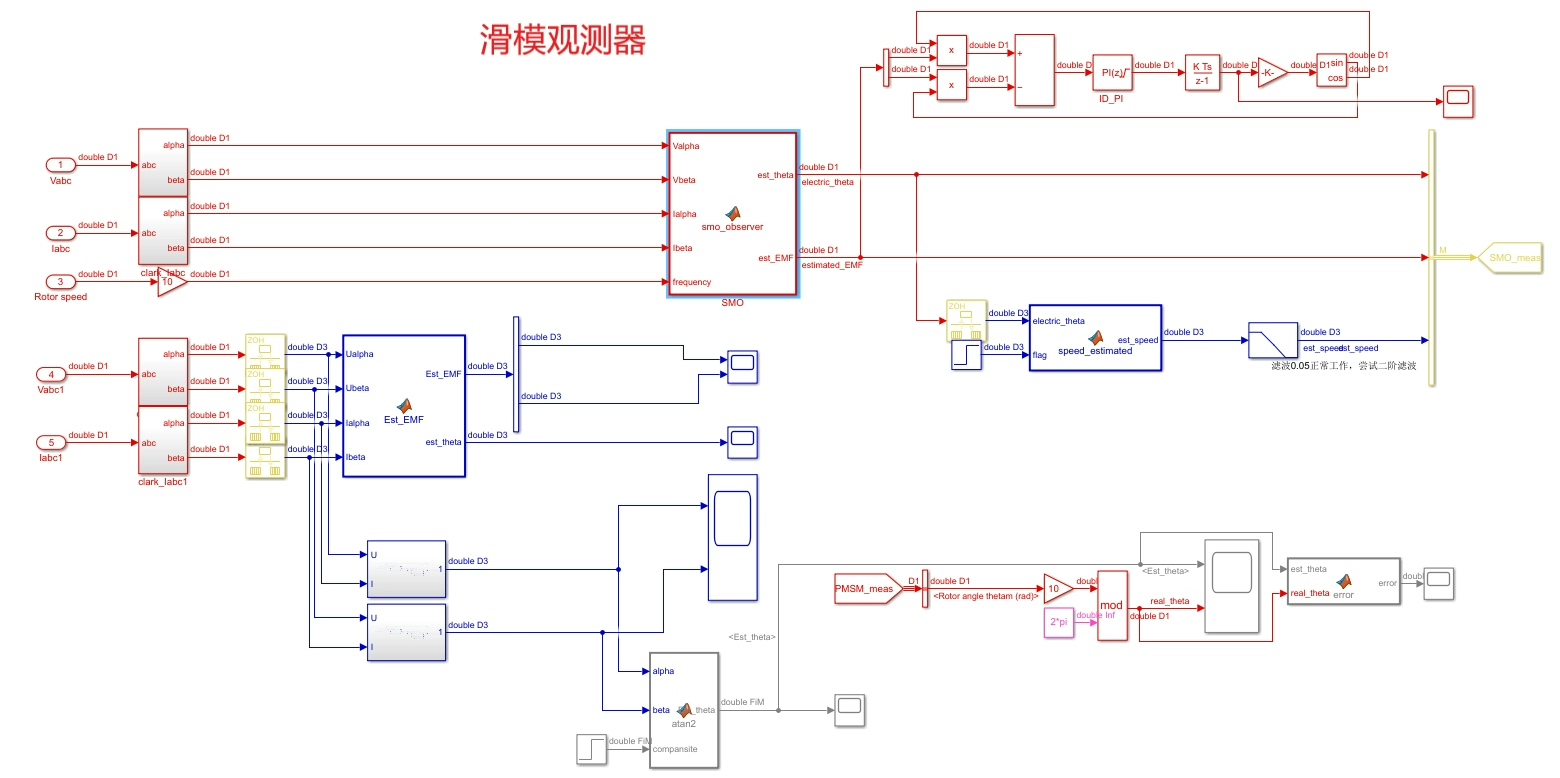
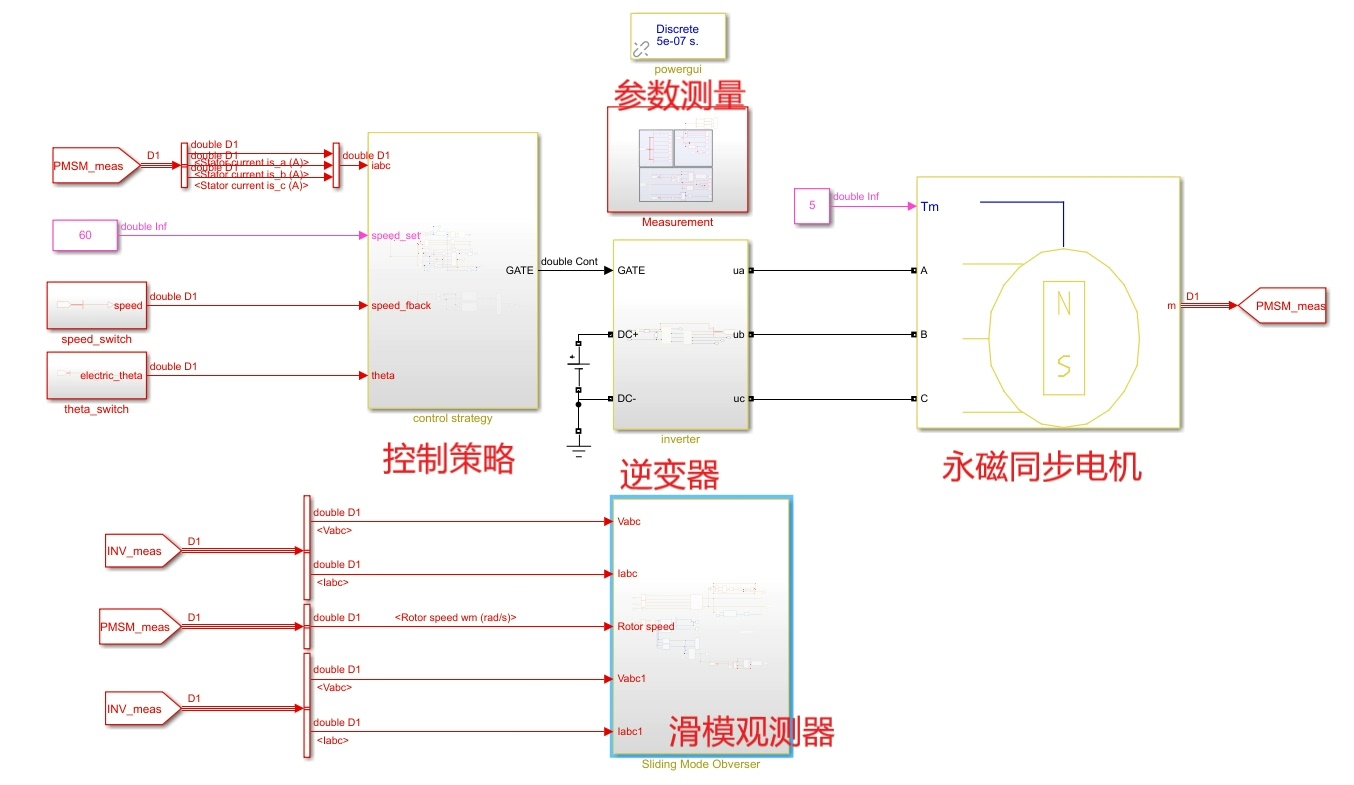
永磁同步无传感SMO滑模观测器模型
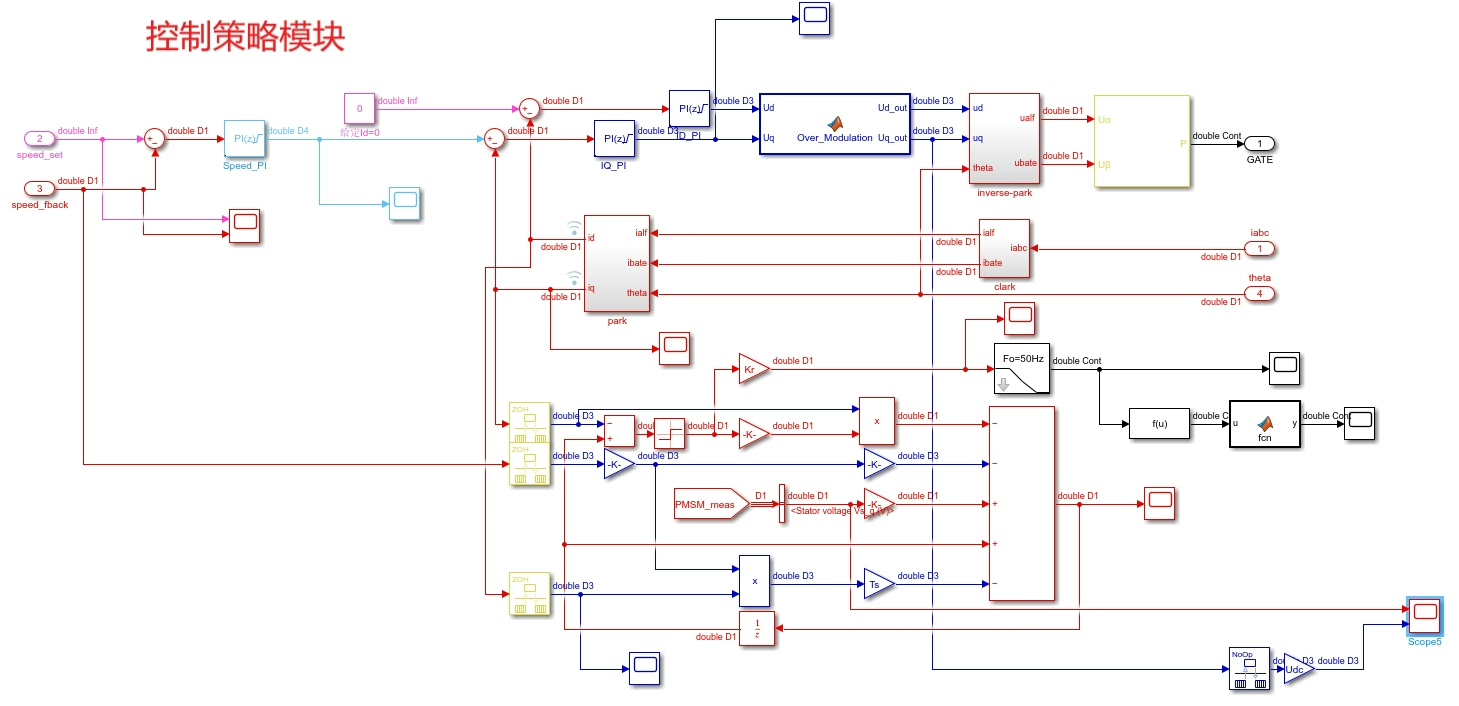
PMSM的滑模观测器Simulink模型
改进了传统一阶滑模所需的低通滤波和相位补偿,使得整个系统相应更快。
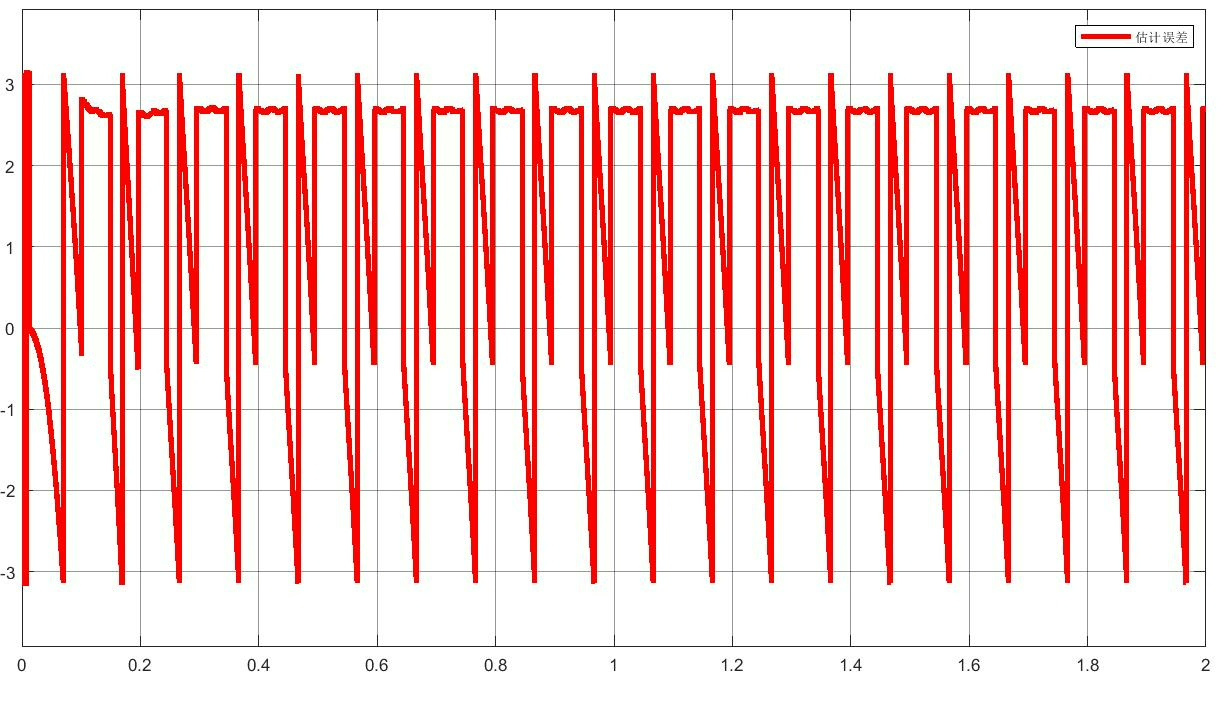
同时,求解符号函数和饱和函数,使观测的角度振动更小更平滑。
ID:16160714167229335
灵犀Mr_p
永磁同步无传感SMO滑模观测器模型在PMSM的应用是一项重要的技术研究领域。本文将围绕这个主题展开,介绍该模型的Simulink实现,并详细讨论了改进的方法和优势。
首先,我们来了解一下永磁同步无传感SMO滑模观测器模型的基本原理。PMSM是一种常见的电机类型,它具有高效率、高功率密度和高控制精度的优点,在许多领域得到广泛应用。传统的PMSM控制方法需要传感器测量转子位置和速度,而永磁同步无传感SMO滑模观测器模型可以通过估计转子位置和速度来实现无传感器控制。
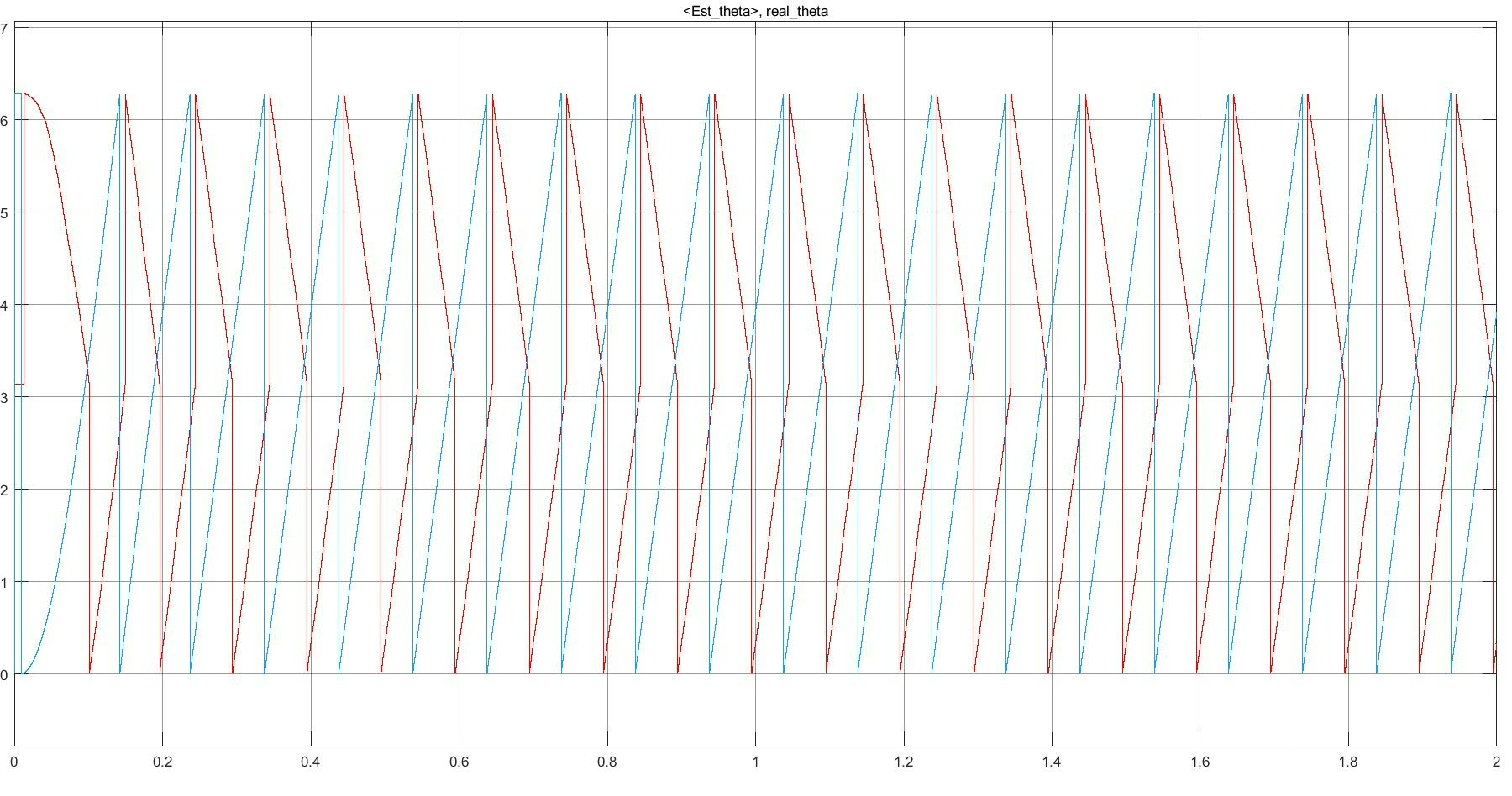
在Simulink中实现永磁同步无传感SMO滑模观测器模型可以使用一系列的模块。首先,需要建立电机的机电模型,包括电机参数、电流控制器和速度控制器等。然后,通过引入滑模观测器来实现无传感器的位置和速度估计。该滑模观测器通过将系统的输出和参考模型的输出进行比较,产生一个控制信号来调节估计误差,从而实现对转子位置和速度的估计。
在改进传统一阶滑模所需的低通滤波和相位补偿方面,我们采取了一些创新措施。传统一阶滑模在实际应用中容易产生振荡和不稳定的现象,这主要是由于滑模变量的高频成分引起的。为了解决这个问题,我们引入了低通滤波器来对滑模变量进行平滑处理,从而减小振荡。此外,我们还引入了相位补偿来改善系统的相应速度。通过调整相位补偿的参数,可以使整个系统的响应更快,提高系统的控制精度。
另外,求解符号函数和饱和函数也是我们改进的重点。传统的滑模观测器模型通常使用符号函数和饱和函数来计算控制信号,但这种方法容易导致估计的角度振荡较大。为了减小振荡并使估计的角度更加平滑,我们引入了更加精确的求解方法。通过优化求解符号函数和饱和函数的算法,我们使得观测的角度振动更小更平滑,进一步提高了系统的控制性能。
综上所述,本文围绕永磁同步无传感SMO滑模观测器模型展开了详细的讨论。通过Simulink实现这个模型,我们改进了传统一阶滑模所需的低通滤波和相位补偿,使得整个系统相应更快。同时,通过优化求解符号函数和饱和函数,我们使观测的角度振动更小更平滑。这些改进方法和优势使得永磁同步无传感SMO滑模观测器模型在PMSM控制中具有更高的精度和稳定性,为实际应用提供了可靠的解决方案。
【相关代码,程序地址】:http://fansik.cn/714167229335.html


















 2158
2158

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









