




HC-SR04 超声波测距模块介绍:
HC-SR04 超声波测距模块是非接触式距离感测设备,具备2cm至400cm的测距范围。其测距精度高达3mm,使得在各种应用场景中都能实现精确的距离测量。模块由超声波发射器、接收器以及控制电路组成。
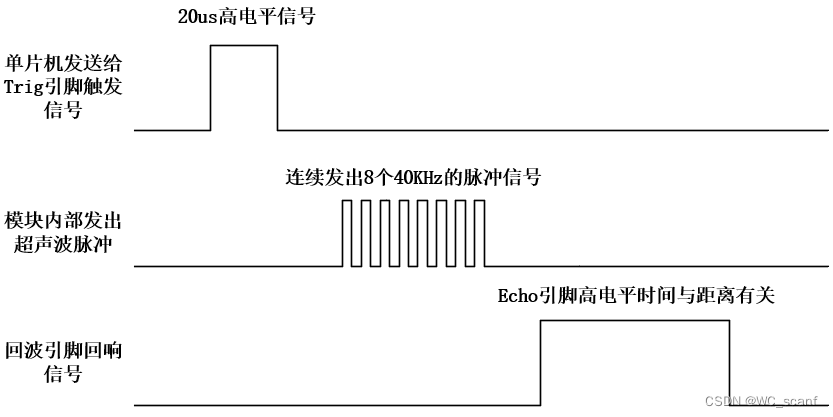
超声波传感器工作原理:
- 确保IO 口 TRIG 信号的高电平持续时间至少为 10us
- 模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回
- IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。使用计时器或计数器来精确测量 ECHO 信号的高电平时间。测试距离=(高电平时间*声速(340M/S))/2
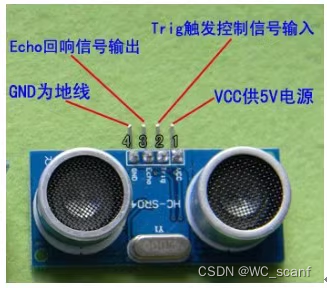
接线端口:
- Vcc:+5V电源供电
- Trig:输入触发信号(触发测距)
- Echo:传出信号回响(传回时间差)
- Gnd:接地
超声波时序图:
实验目的:设计一个可以用数码管实时显示测得距离大小
模块框图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 591
591




 到【灌水乐园】发言
到【灌水乐园】发言







