



当下半导体封装环境正面临着一个巨大的矛盾,即日益增长的复杂产品需求,与僵化的传统制造能力之间的矛盾。具体来说,该矛盾主要体现在两个方面:一是半导体封装的多工艺上,二是现在主流的半导体贴片结构上。
一、多种封装工艺需求:
“单机单工艺”现象普遍,企业资本负担加重
半导体封装后道工序涉及多种基板材料(引线框架、PCB、陶瓷、玻璃等)和复杂的互联工艺(装片、键合等)。不同的材料和工艺对设备的要求截然不同,这就导致了当下“专机专用”的普遍现象。
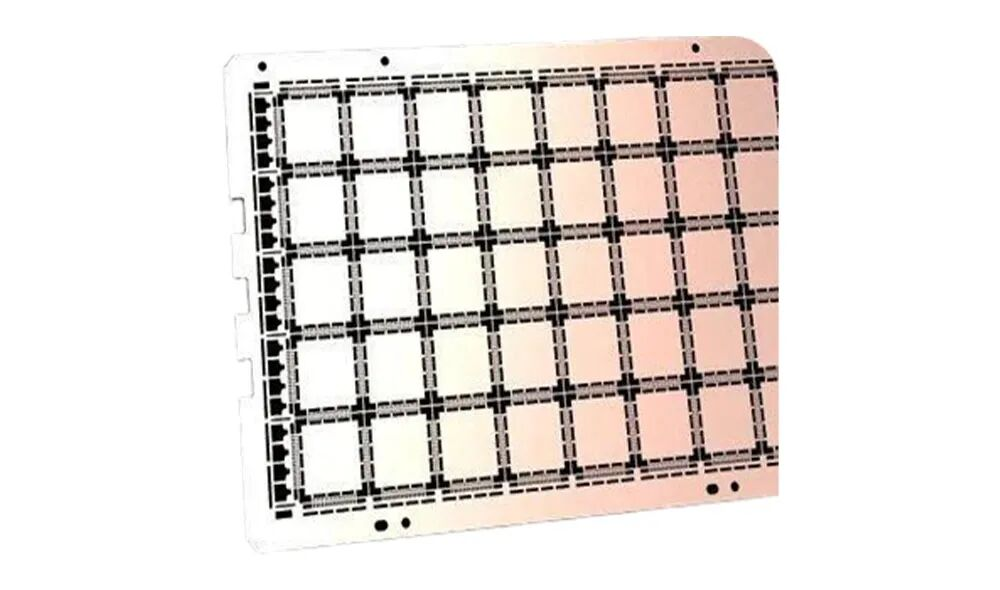
1、引线框架封装
引线框架封装常见的工艺是银浆粘贴和共晶工艺。它面临着换线繁琐的痛点:一条产线需要随时切换银浆粘贴产品和共晶焊产品的生产。这两种工艺设备完全不同(共晶焊需要加热台、真空吸附和高温吸嘴),而工艺的切换意味着整台设备的更换、重新调试和校准,耗时长达数小时甚至更久。
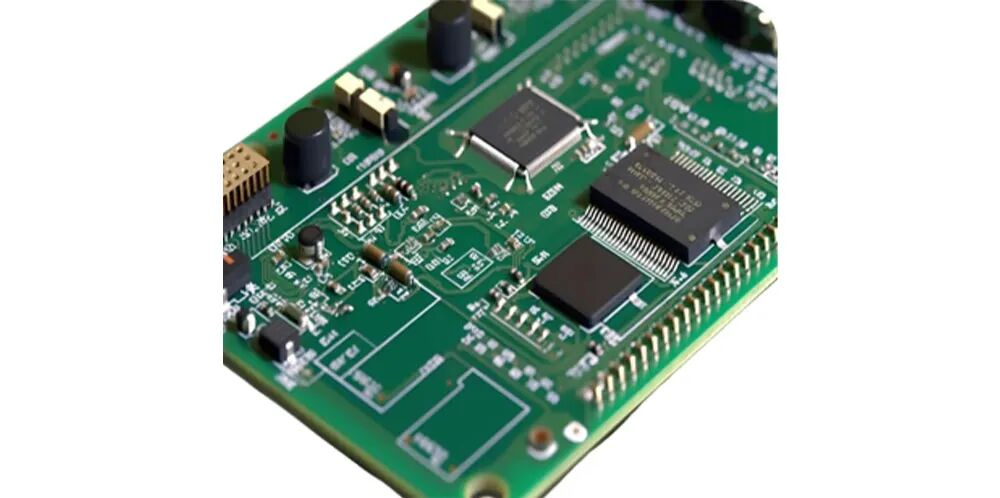
2、PCB 基板封装
PCB基板封装的常见工艺是银浆粘贴和多种芯片集成,其中“多种芯片集成”是最大的挑战。一颗复杂的芯片(如SiP系统级封装)可能同时包含逻辑芯片、存储芯片、射频芯片等。这些芯片可能来自不同晶圆、厚度不同、大小不同,甚至要求不同的粘贴工艺,如何处理这些繁杂的来料是一个重要课题。
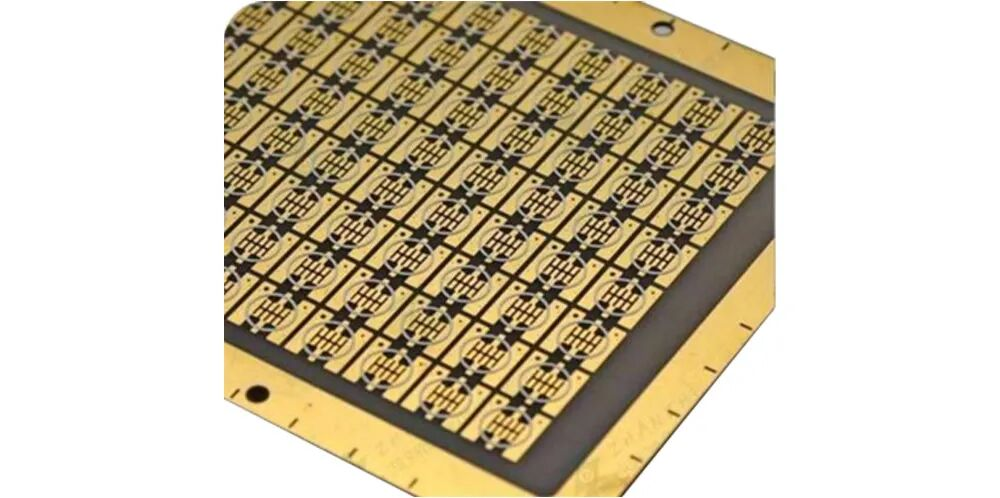
3、陶瓷基板封装
在航空航天、军工产品生产中,需要用到许多不同的工艺,如:银胶、共晶、超声、键合等。
它不仅要面临工艺多样化的问题,同时键合需要长时间的高温高压,对设备的热管理、材料热膨胀控制、精密力控都是巨大挑战。
面临多样化的基板以及多样化的工艺,对于许多封装厂商来说,“专机专用”是当下的“第一解题思路”,但并非是“最优解题思路”。它造成巨大的资本浪费,不仅无法适应订单波动和工艺迭代的常态,其僵化的产线还迫使企业必须为每一种新产品或新工艺追加投资购置专用设备。因此,如何突破重复投资的困境,已成为关乎企业竞争力的核心议题。
二、主流贴片结构的问题:
无法同时兼顾三大需求,影响生产产能
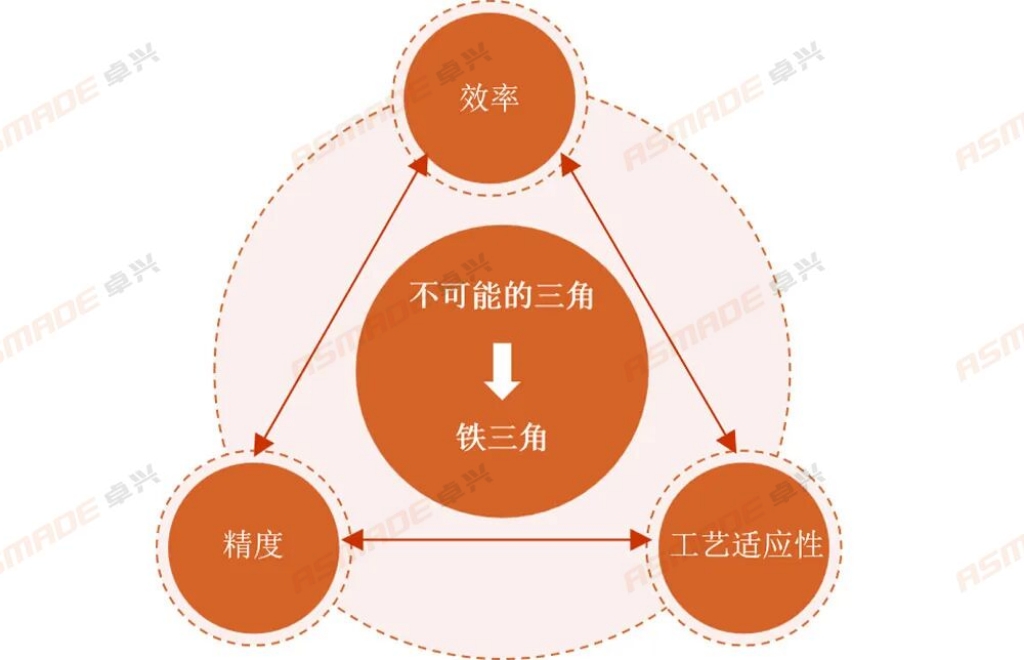
除了“专机专用”现象,半导体封装面临的矛盾的第二大方面便出现在结构上。在经济学中有一个专有名词叫做“不可能的三角”,这在半导体封装中也同样适用,半导体封装中的不可能三角通常指“精度”“速度”和“工艺适应性”三者之间的不平衡。如何解决这“不可能三角”,使其变成“工艺铁三角”,是每一个封装行业人需要思考的问题。
效率与精度
要获得高效率意味着运动部件需要极大的加速度,但这会产生巨大的惯性力,导致机械结构发生难以避免的弹性形变和振动。如果运动产生的激励频率恰好与设备机械结构的某阶固有频率吻合,就会引发剧烈共振,影响精度。
因此,卓兴半导体运动控制团队设计更先进的力矩前馈和振动抑制算法来解决:
①对于简单的点位运动,我们通常采用基于运动学的PID控制。
②为了提高响应速度并抵消重力,系统采用了基于动力学的力矩前馈和惯量辨识。
③为了解决高速下的抖动问题,工程师们实施了基于振动学的滑模变结构控制算法。
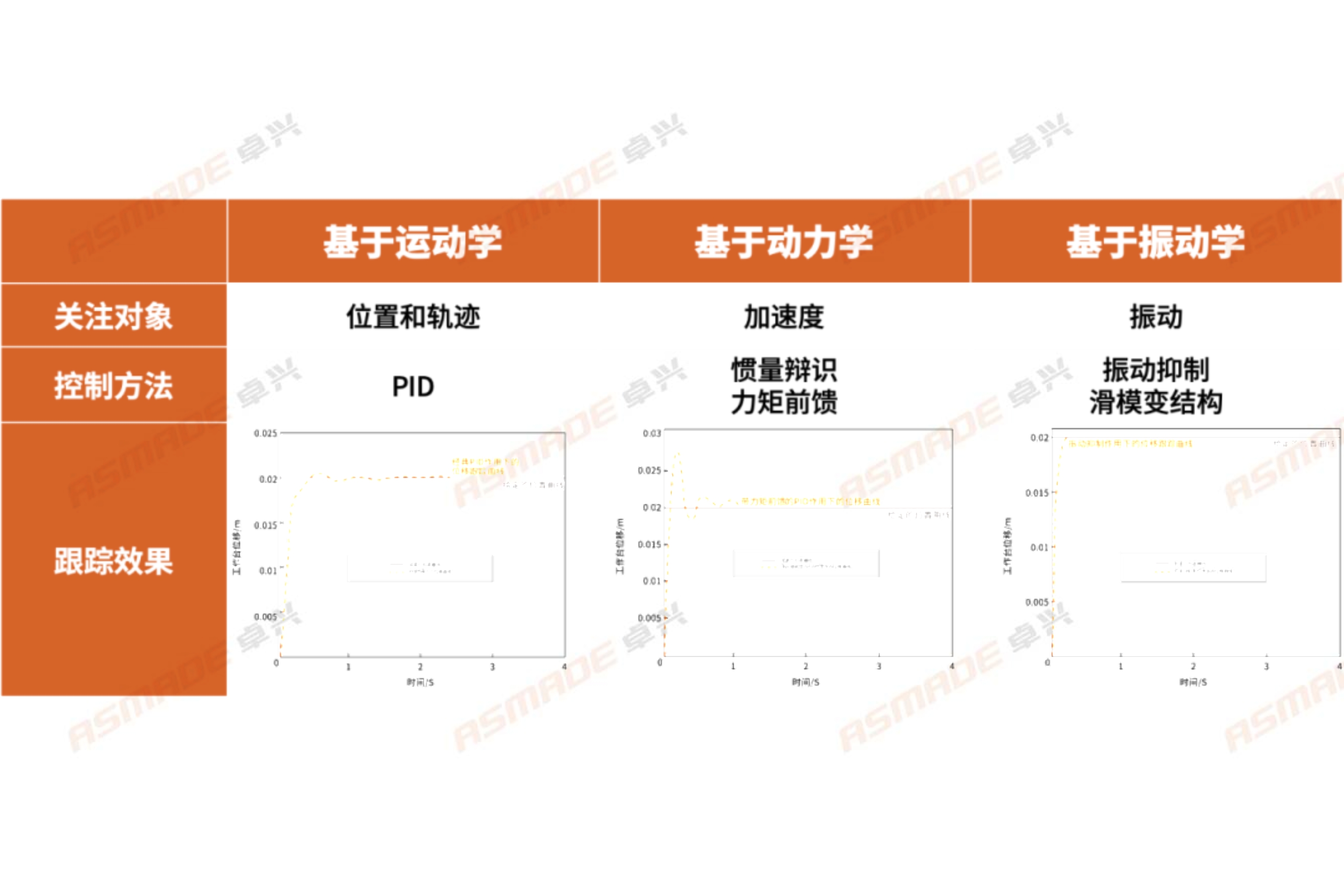
解决方案:力矩前馈和振动抑制算法
精度与工艺适应性
每一种新工艺都会引入独特的干扰源,更换不同材质或重量的吸嘴/工具,会改变运动系统的动态特性。要维持高精度,设备必须为每一种可能的工艺配置和工具组合建立独立的误差补偿模型。
因此,卓兴半导体采用平面转塔式贴装架构,完美补充这个缺陷:
不同的物料拥有独立的上料系统,能够做到支持多种物料混合键合和混合贴装。
在贴装架构的运转过程中的其中一个工位安装中转台和视觉检测机构,实时确保贴装精度,保证生产精度。

效率与工艺适应性
设备在不同来料间切换时,需要换线时间来更换吸嘴、校准高度、调整工艺参数。这个过程非常耗时,严重拉低了整体设备效率。而专用设备则无需换线,可以持续高速生产,但同时也完全舍弃掉了多工艺适应的能力。
因此,卓兴半导体架构提出了两个概念:
模块化设计:将不同工艺模块做成即插即用的标准单元,使得工艺的更换只需要快速更换模组,解决了专机专用的适应性问题。
平面转塔架构:不同工位的不同吸嘴应对不同的来料,解决了多物料集成的效率问题。
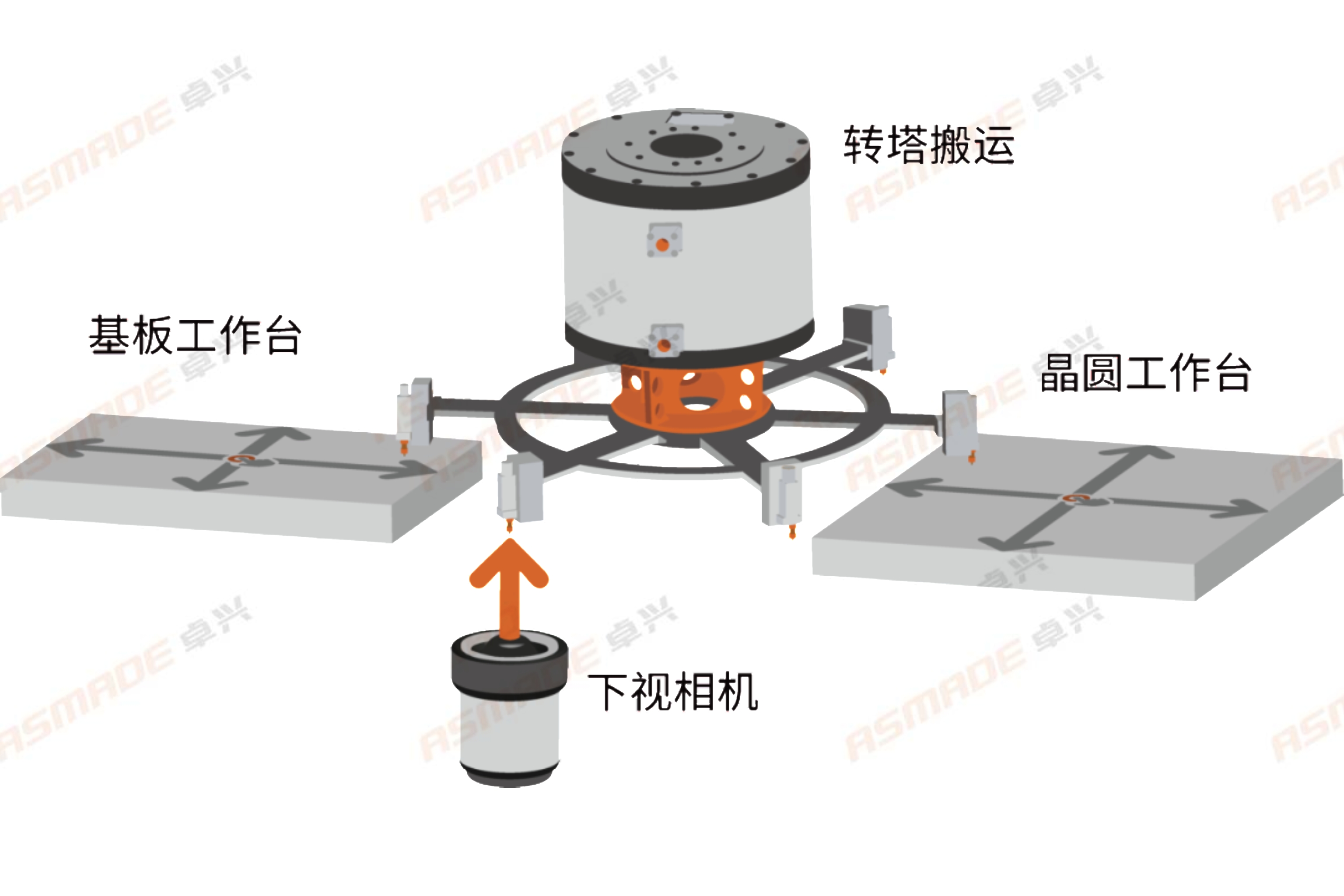
解决方案:平面转塔结构
三、高精度封装设备:
破局设备“多工艺适应性”与“不可能三角”难题
针对多工艺生产需求带来的“专机专用”难题,和设备在精度、速度与工艺适应性之间的难以维持三者平衡的矛盾,卓兴半导体独立研发两大新型设备——高精度多功能贴片机和半导体银胶粘片机,通过模块化设计、平面转塔结构以及先进的力矩前馈和振动抑制算法,助力破解设备的多工艺适应性难题,并找到最适合当前技术目标的最佳平衡点,突破同时实现“不可能三角”的难度,把不可能三角变成铁三角。

更多设备性能,欢迎咨询探讨!

















 1162
1162

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









