



篇幅所限,本文只提供部分资料内容,完整资料请看下面链接
https://download.youkuaiyun.com/download/AI_data_cloud/88280914
资料解读:某服饰企业供应链高效数字化管理方案
详细资料请看本解读文章的最后内容。
服装行业正朝着数字化、智能化方向加速转型,供应链的高效管理成为企业核心竞争力的关键。该方案围绕服饰企业价值供应链数字化管理展开,系统剖析了行业需求、现存痛点,并提出了针对性的解决方案与实施路径。
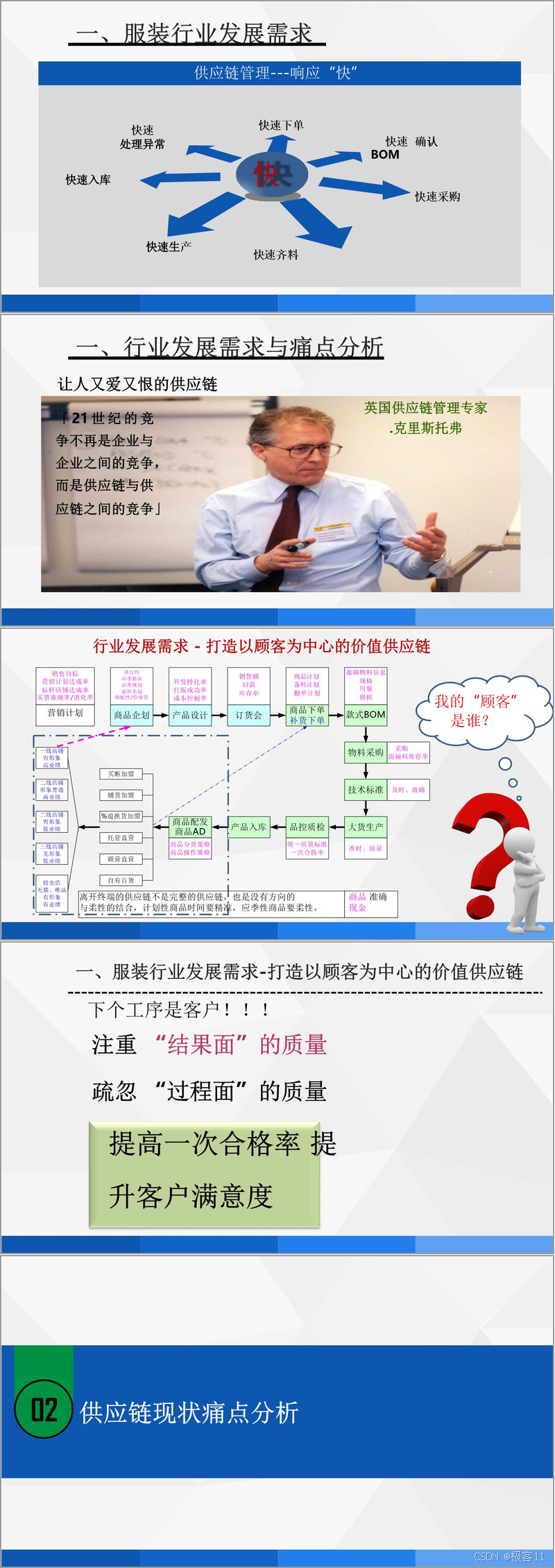
从行业发展需求来看,新零售模式下,消费者需求愈发个性化、多元化,市场驱动产品的特征显著。这要求供应链具备快速响应能力,涵盖快速确认 BOM、采购、生产、齐料、入库及异常处理等全环节。同时,以顾客为中心的价值供应链理念凸显,强调下一工序即客户,需注重过程质量以提升一次合格率和客户满意度。
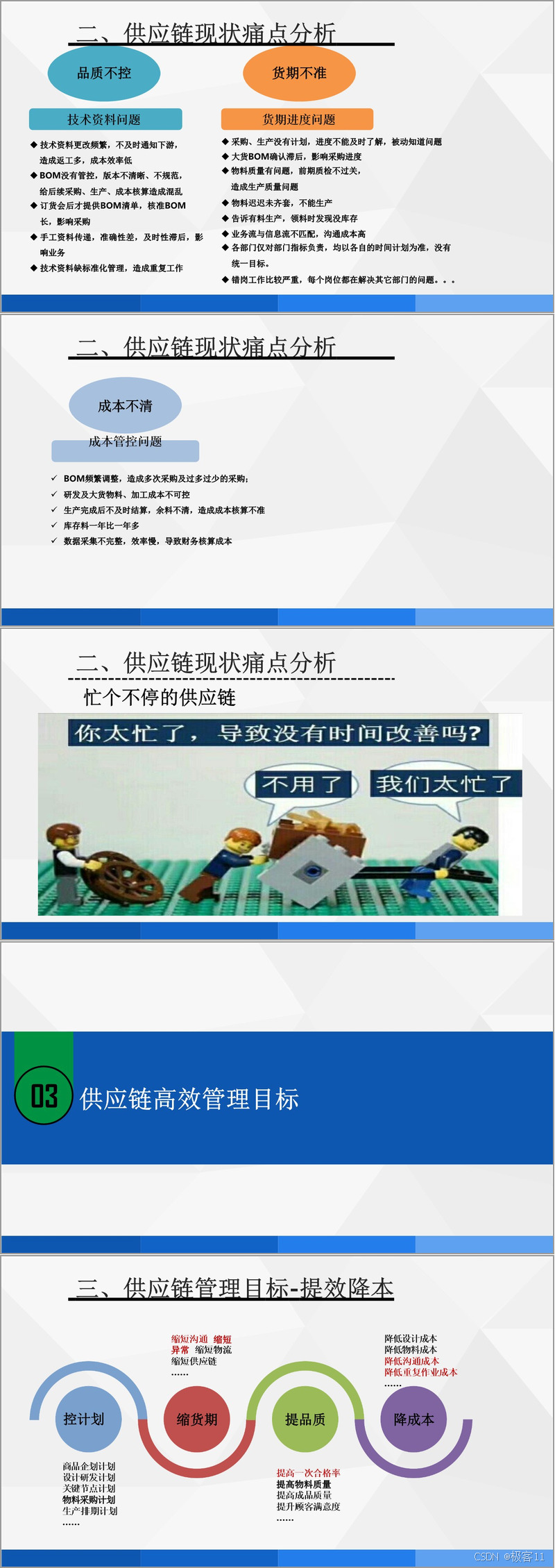
供应链现状存在诸多痛点。货期进度方面,采购与生产缺乏计划,进度不透明,BOM 确认滞后、物料质量问题及部门协同不畅等导致效率低下;技术资料管理混乱,更改频繁且传递不及时,BOM 版本不规范,手工传递易出错;成本管控不力,BOM 调整频繁造成采购浪费,成本核算不准确,库存积压严重。这些问题使得供应链陷入 “忙而低效” 的困境。
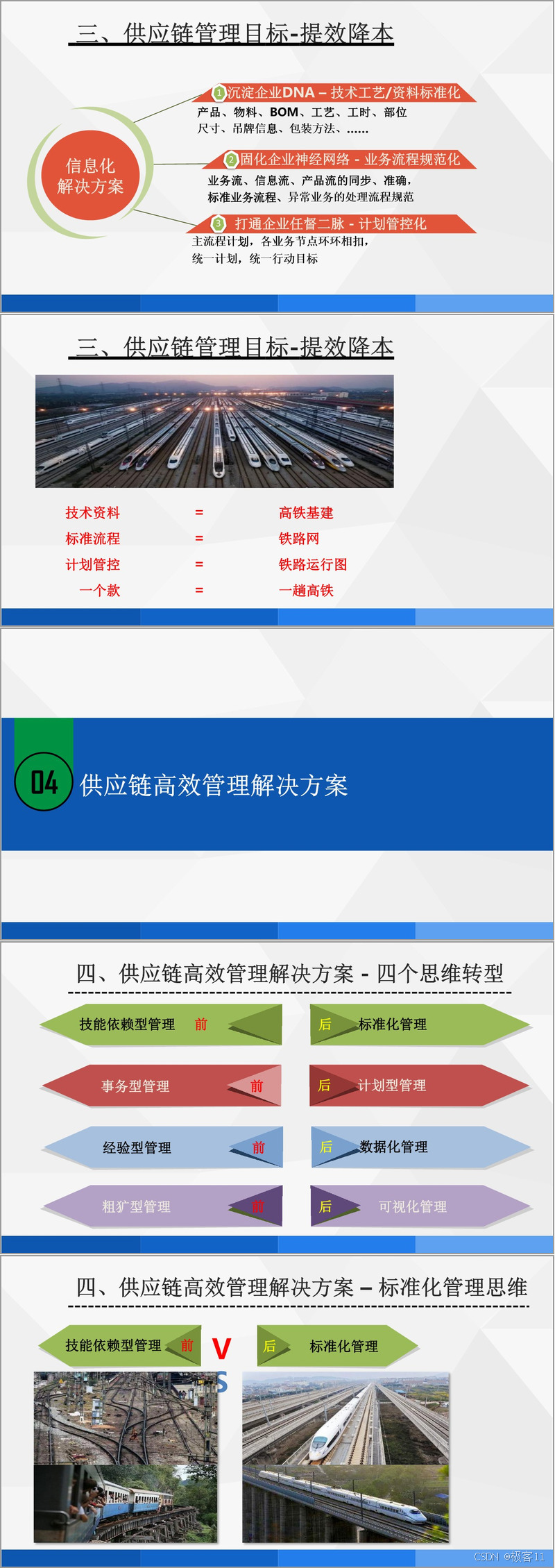
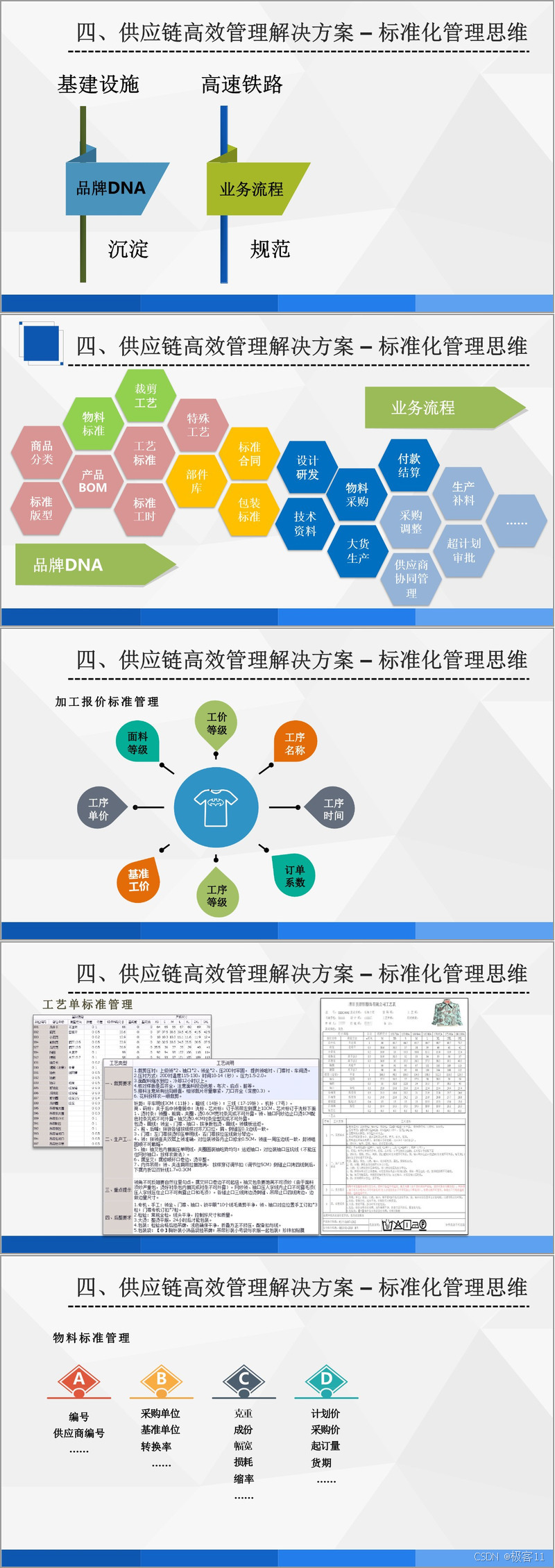
基于此,供应链高效管理目标明确为 “缩货期、控计划、提品质、降成本”。通过规范业务流程与异常处理流程,实现业务流、信息流、产品流的同步准确;推动技术工艺与资料标准化,固化业务流程,打造如同 “高铁基建 + 铁路网 + 铁路运行图” 般高效协同的供应链体系。
解决方案的核心在于四大思维转型:从事务型管理转向计划型管理,从事务驱动变为计划引领,通过 OTT 关键节点管控和生产排程计划,实现全流程量化与可视化;从技能依赖型转向标准化管理,涵盖商品分类、物料标准、产品 BOM、工艺标准等多方面,规范业务单据与流程;从经验型管理转向数据化管理,利用数据进行问题分析、决策制定和绩效评估,实现成本、供应商等多维度的数据化管控;从粗犷型管理转向可视化管理,通过研发占位看板、PMC 管控看板等工具,实时呈现供应链各环节进度与异常。
建立柔性供应链管理体系是最终目标,需实现流程标准高效化、时间节点细量化、复杂工作简单化等九大要点。以数字化经营为核心,通过掌握、管理和运用数据,驱动供应链各环节协同运转,确保在需要的时间提供所需数量和品质的产品,赋能新零售发展。
接下来请您阅读下面的详细资料吧。


















 772
772

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











