




一、整体流程简介
目前,SVPWM算法的合成主要有两种:基于软件模式的合成(七段式SVPWM)和基于硬件模式的合成(五段式SVPWM)。本笔记主要记录软件模式。
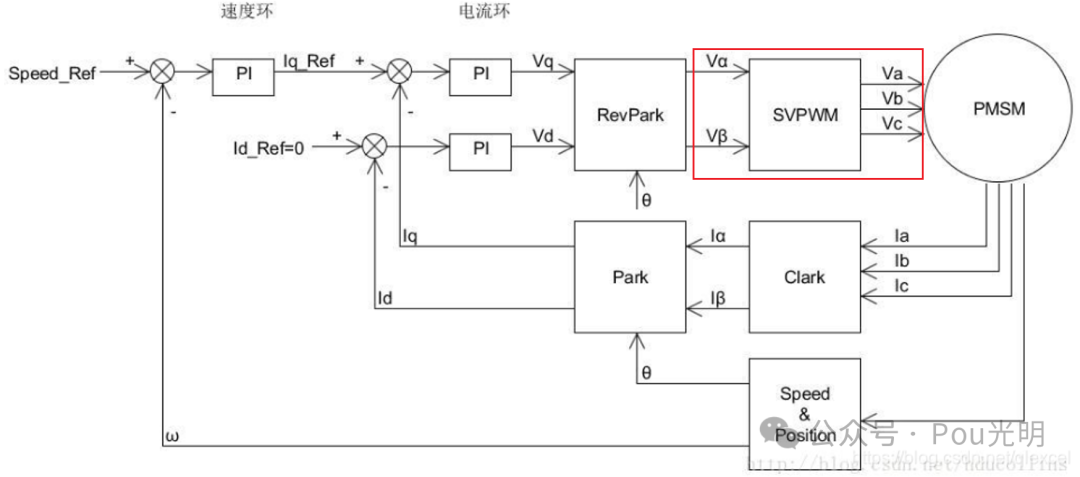
本次介绍的红框部分内容。这次之后,主要还差速度环与位置环的PI控制器。但这次之后我们可以实现开环的PMSM控制。
正如之前的分析(后面再补上),要实现SVPWM信号的实时调制,首先要知道参考电压矢量Uout所在的区间位置,然后利用所在扇区的相邻两电压矢量和适当的零矢量来合成参考电压矢量,下面介绍流程。
主要是参考电压矢量的扇区判断:N=4C+2B+A
非零矢量和零矢量作用时间的计算,这块还需注意作用时间的超调处理。
扇区矢量切换点的确定。
二、SVPWM算法的建模与仿真
基于Simulink的仿真与建模
根据之前的介绍,同时为了验证SVPWM算法的正确性,建立七段式SVPWM算法的仿真模块图,如下图所示。具体参数设置为uα=200cos100πt,uβ=200sin100πt,PWM开关周期Tpwm(Tpwm=0.0002s),直流侧电压Udc=700V,仿真算法采用变步长ode23tb算法,且最大仿真厅(Max Step Size)设置为0.00001,其余变量保持初始值不变。根据之前的理论分析,各个模块仿真模型如图2-8,分别是扇区N的计算、中间变量XYZ的计算、T4(T1)和T6(T2)的计算,以及切换时间Tcm1、Tcm2、Tcm3的计算等仿真模块。使用MATLAB R2022b验证。
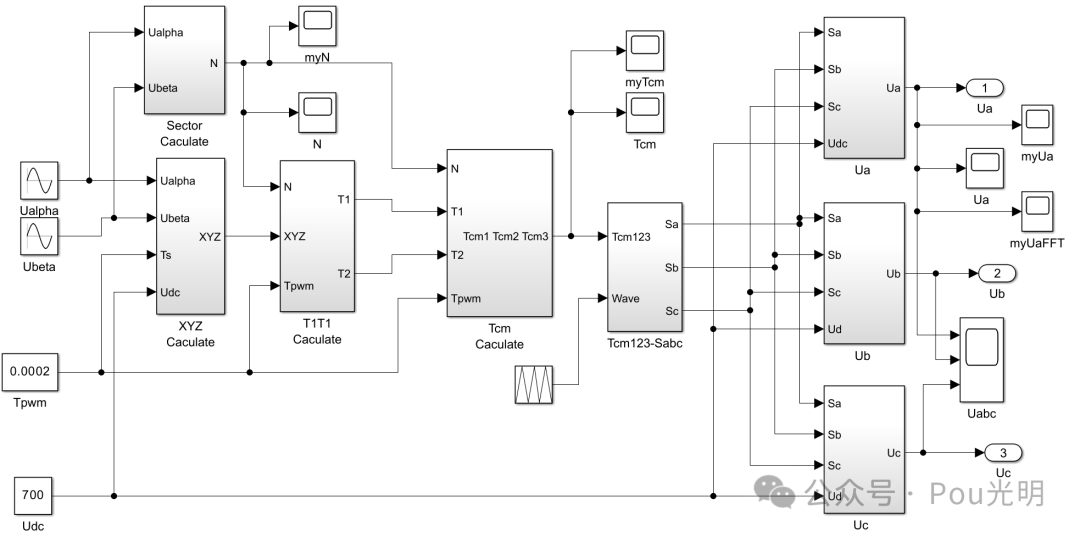
图2-7
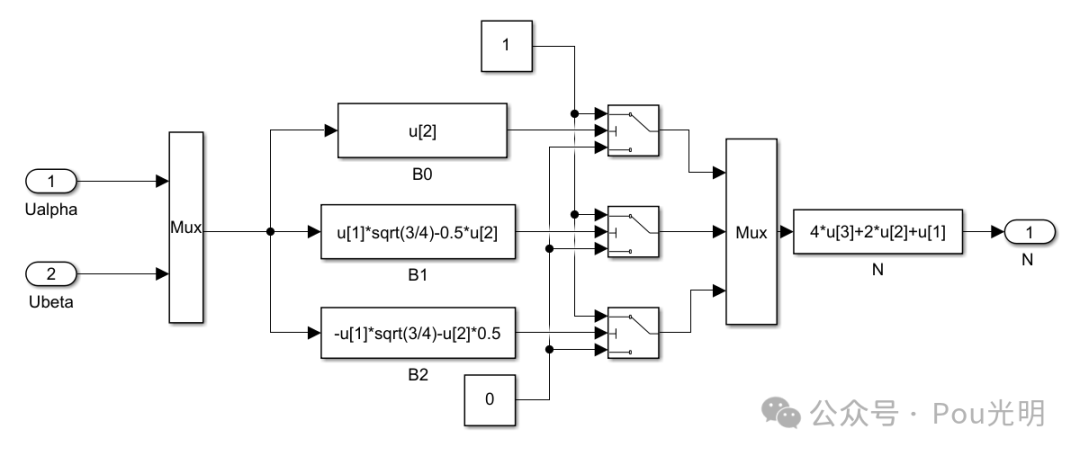
扇区N的判断
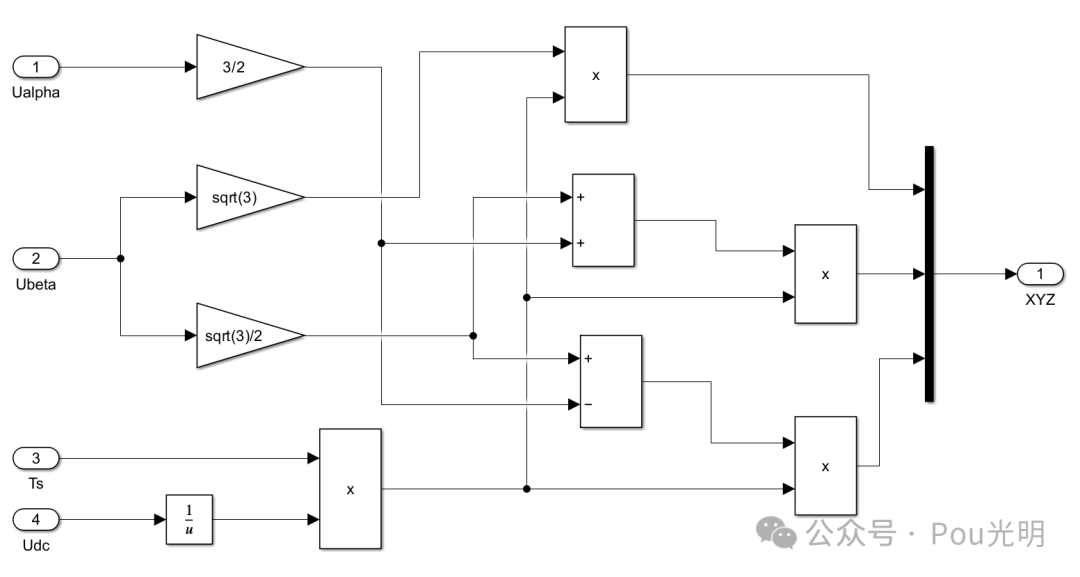
中间变量X、Y和Z的计算
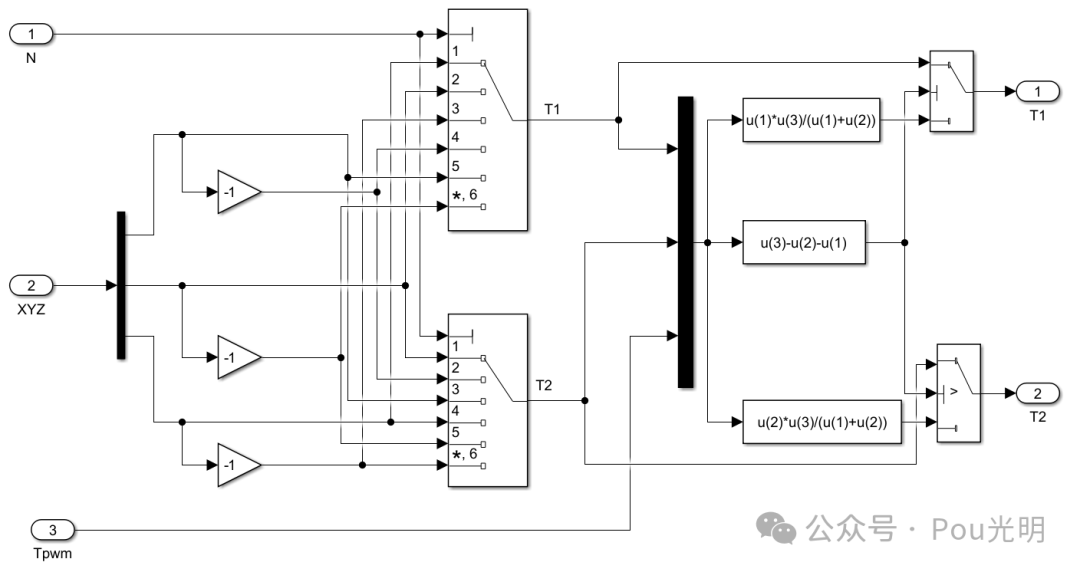
T4(T1)和T6(T2)的计算
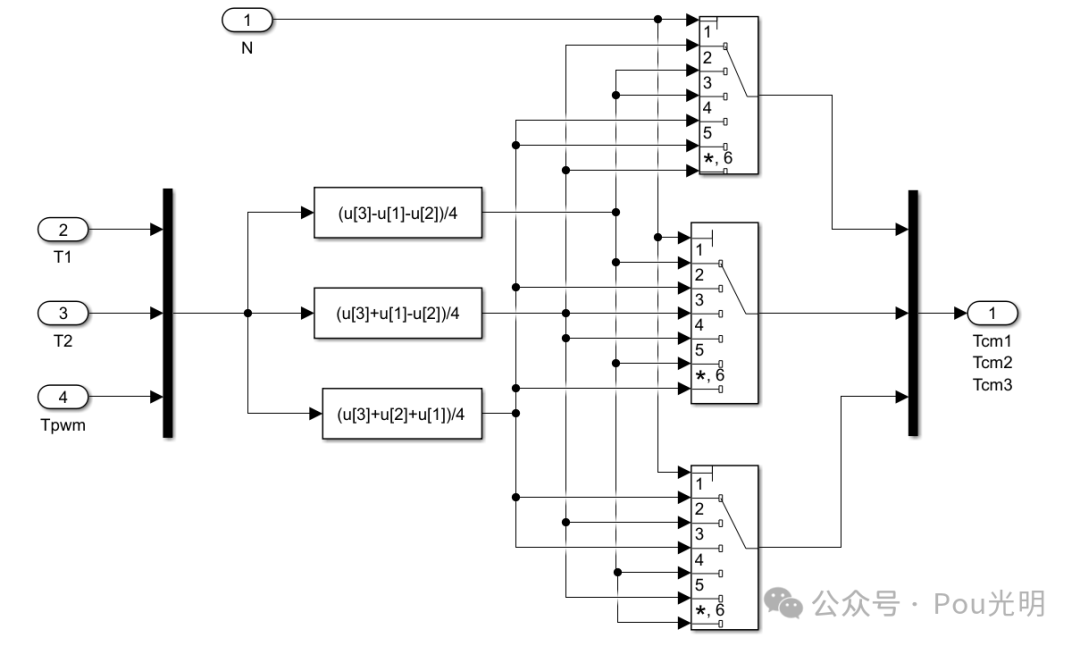
图2-8
切换时间Tcm1、Tcm2、Tcm3的计算
算法正确性验证结果如下列图片。由图2-9(a)可知,扇区N值为3->1->5->4->6->2且交替变换,与表2-3所示的结果相同;由图2-9(b)可知,由SVPWM算法得到的调制波成马鞍形,这样有利于提高直流电压的利用率,有效抑制谐波;由图2-9(c)可以看出,得到的相电压Uα为6拍阶梯波,与实际理论值相符;由图2-9(d)可以看出,通过FFT分析可知相电压Uα的基波幅值为200V,与实际值(200V)相符。一次,以上仿真结果验证了模型的正确性和可行性。

(a) 扇区N的计算结果

(b) 切换时间Tcm1、Tcm2、Tcm3的计算结果
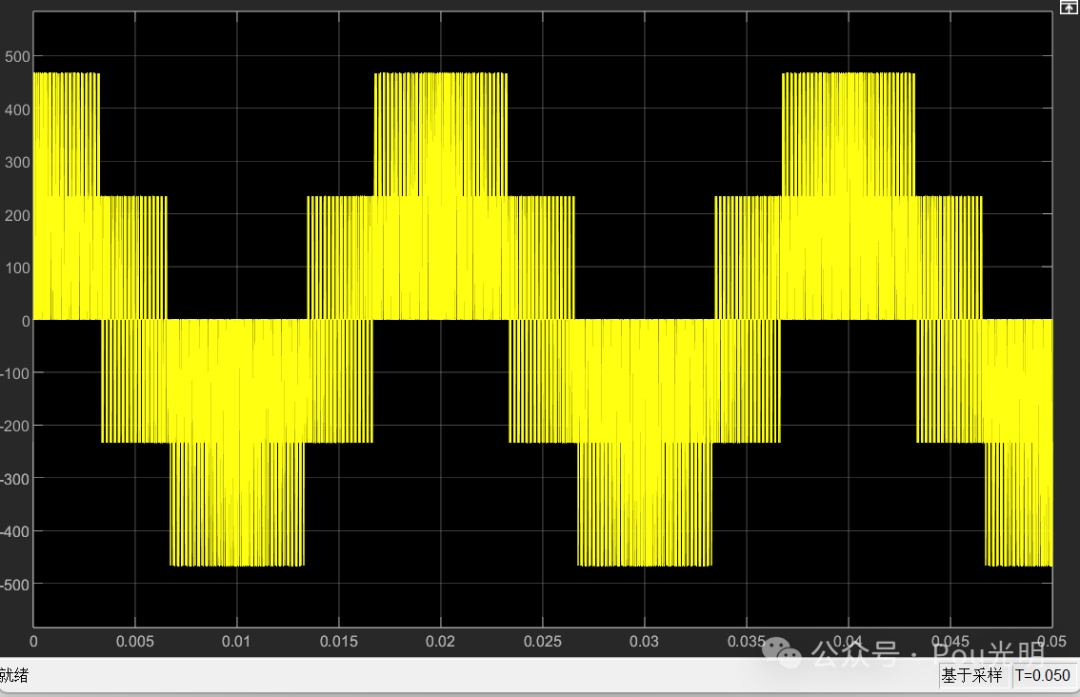
(c) 相电压Ua计算结果
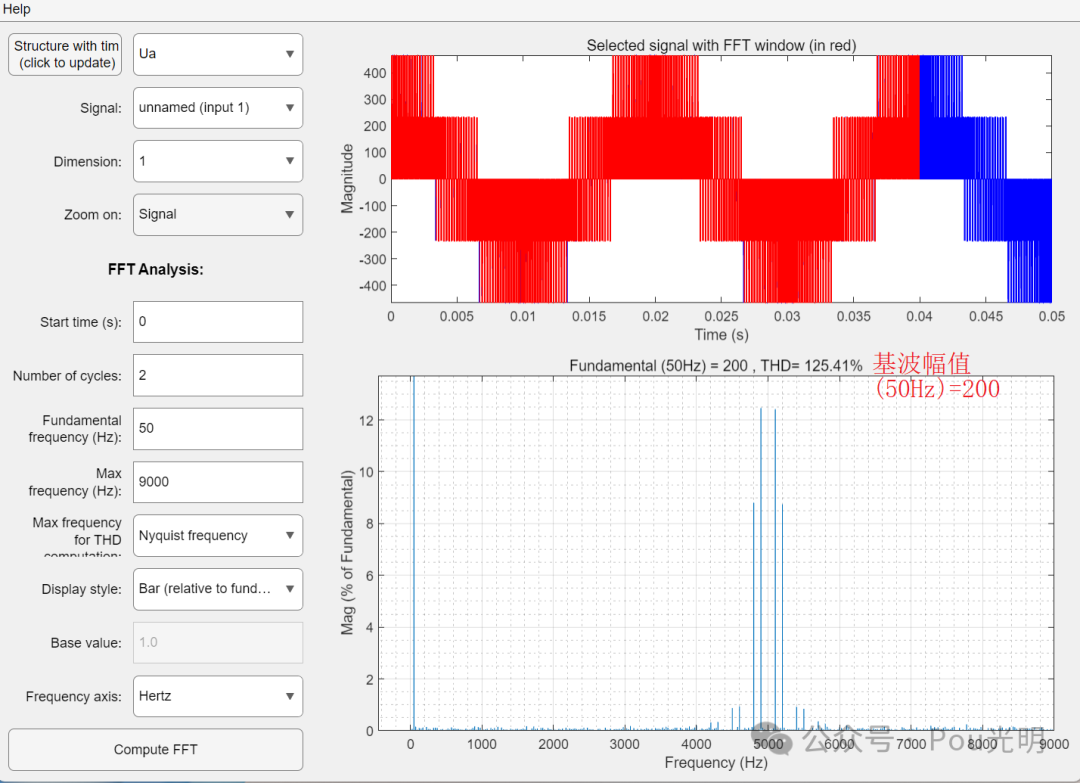
(d) 相电压Ua的FFT分析
图2-9
欢迎关注
如需simulink仿真程序,请在公众号赞赏,
赞赏后自动发送仿真程序。


















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









