<think>我们正在设计一个使用Arduino控制的小车,它没有舵机,但配备三个超声波传感器(左、中、右)来实现走迷宫的功能。
思路:
1. 三个超声波传感器分别安装在小车的左前方、正前方和右前方,用于检测三个方向的障碍物距离。
2. 小车的运动控制:我们可以通过控制两个电机的差速来实现转向(例如,左转时右电机前进,左电机停止或后退;右转同理)。
3. 迷宫策略:通常采用“左手定则”或“右手定则”,即始终沿着墙的一侧走。这里我们假设采用“左手定则”,即优先左转,其次直行,最后右转。
4. 具体决策逻辑:
- 如果左边没有障碍物(距离足够大),则左转。
- 否则,如果前方没有障碍物,则直行。
- 否则,如果右边没有障碍物,则右转。
- 否则,后退或掉头(说明进入死胡同)。
5. 由于没有舵机,我们无法转动传感器,因此三个固定方向的传感器可以同时测量三个方向。
硬件连接假设:
- 三个超声波传感器:左、中、右,分别连接到Arduino的引脚(Trig和Echo)。
- 两个电机驱动:假设使用L298N电机驱动模块,控制两个直流电机。
- 蜂鸣器(可选,用于调试或指示状态)。
代码结构:
- 定义超声波传感器的引脚。
- 定义电机控制引脚。
- 初始化函数setup():设置引脚模式,初始化串口(用于调试)。
- 循环函数loop():
a. 分别读取三个超声波传感器的距离。
b. 根据距离判断三个方向是否有障碍物(需要设定一个阈值,比如15厘米)。
c. 根据决策逻辑(左手定则)决定运动方向。
注意:超声波测距函数需要单独编写,为了避免阻塞,可以考虑使用非阻塞方式,但为了简单,我们先使用阻塞方式(每次测量后都有一定的延迟)。
由于代码较长,我们将分步骤编写。
假设引脚定义如下:
超声波传感器(左):Trig_L, Echo_L
超声波传感器(中):Trig_M, Echo_M
超声波传感器(右):Trig_R, Echo_R
电机控制引脚(以L298N为例):
电机A(左电机):IN1, IN2, ENA(使能)
电机B(右电机):IN3, IN4, ENB(使能)
我们使用PWM控制速度,使能引脚接PWM引脚。
具体引脚定义根据实际接线调整。
代码实现:
注意:为了简化,我们假设电机驱动模块的接线方式如下:
IN1和IN2控制左电机的方向,IN3和IN4控制右电机的方向。
例如:
左电机前进:IN1=HIGH, IN2=LOW
左电机后退:IN1=LOW, IN2=HIGH
右电机前进:IN3=HIGH, IN4=LOW
右电机后退:IN3=LOW, IN4=HIGH
我们定义以下运动函数:
forward(): 两个电机都前进
backward(): 两个电机都后退
turnLeft(): 左转(右电机前进,左电机停止或后退,根据实际情况调整)
turnRight(): 右转(左电机前进,右电机停止或后退)
stop(): 停止
在转弯时,我们可以采用差速的方式:例如左转时,右电机前进,左电机不动(或慢速),这样就能实现左转。
由于迷宫通道通常不会太宽,转弯角度需要根据实际情况调整。我们可以通过控制转弯的时间来实现90度转弯(需要实验调整)。
但是,由于我们没有编码器,所以转弯角度可能不精确。因此,我们也可以采用另一种方式:当需要转弯时,让小车原地旋转90度(或根据传感器反馈调整直到没有障碍物在左侧)。
然而,为了简单,我们这里采用固定时间的转弯(比如左转:右电机前进,左电机后退,持续一段时间,实现原地左转)。但注意,这样可能会因为电机性能、电池电量等因素导致每次转弯角度不一致。
因此,我们也可以考虑使用传感器反馈来调整:例如,左转直到左边传感器检测到墙壁(在迷宫中,转弯后应该左侧有墙)?但这样需要更复杂的控制。
我们先采用固定时间转弯的方式,后续可以改进。
具体步骤:
1. 定义引脚。
2. 编写超声波测距函数(三个传感器分别测量)。
3. 编写电机控制函数(前进、后退、左转、右转、停止)。
4. 在loop中,读取三个距离,然后根据策略决定动作。
策略细化(左手定则):
- 如果左边距离大于阈值(表示左边没有墙或墙比较远),则左转(90度)。
- 否则,如果前方距离大于阈值,则直行。
- 否则,如果右边距离大于阈值,则右转(90度)。
- 否则,后退(或掉头:左转180度或右转180度)。
注意:在转弯后,需要让小车直行一小段距离,以避免连续转弯导致位置不正。
我们设定一个安全阈值(比如15厘米),当距离小于这个阈值时认为有障碍物。
由于超声波传感器在近距离可能会有误差,我们可以设置一个最小测量距离(比如2厘米)和最大测量距离(比如200厘米)。
代码实现如下(注意:由于没有实际环境,可能需要调整转弯时间和距离阈值):</think>以下是基于Arduino控制的小车使用三个超声波传感器(左、中、右)实现迷宫导航的代码方案。代码采用"左手定则"导航策略(优先左转,其次直行,最后右转),并包含传感器数据处理和电机控制逻辑。
```cpp
// 定义超声波传感器引脚
const int trigLeft = 9, echoLeft = 8; // 左侧传感器
const int trigCenter = 11, echoCenter = 10; // 中间传感器
const int trigRight = 13, echoRight = 12; // 右侧传感器
// 定义电机控制引脚(L298N驱动模块)
const int enA = 5; // 左电机PWM
const int in1 = 4, in2 = 3; // 左电机方向
const int in3 = 2, in4 = 7; // 右电机方向
const int enB = 6; // 右电机PWM
// 参数配置
const int SAFE_DISTANCE = 15; // 安全距离(cm)
const int TURN_DELAY = 300; // 转弯持续时间(ms)
const int SPEED = 150; // 正常速度(0-255)
void setup() {
// 初始化超声波引脚
pinMode(trigLeft, OUTPUT);
pinMode(echoLeft, INPUT);
pinMode(trigCenter, OUTPUT);
pinMode(echoCenter, INPUT);
pinMode(trigRight, OUTPUT);
pinMode(echoRight, INPUT);
// 初始化电机引脚
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
Serial.begin(9600); // 调试用串口
}
// 超声波测距函数
int getDistance(int trigPin, int echoPin) {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH);
return duration * 0.034 / 2; // 计算距离(cm)
}
// 运动控制函数
void moveForward() {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
analogWrite(enA, SPEED);
analogWrite(enB, SPEED);
}
void turnLeft() {
// 右轮前进,左轮后退
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
analogWrite(enA, SPEED);
analogWrite(enB, SPEED);
delay(TURN_DELAY);
stopMotors();
}
void turnRight() {
// 左轮前进,右轮后退
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
analogWrite(enA, SPEED);
analogWrite(enB, SPEED);
delay(TURN_DELAY);
stopMotors();
}
void stopMotors() {
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop() {
// 获取三个方向的距离
int distLeft = getDistance(trigLeft, echoLeft);
int distCenter = getDistance(trigCenter, echoCenter);
int distRight = getDistance(trigRight, echoRight);
// 调试输出
Serial.print("L:");
Serial.print(distLeft);
Serial.print(" C:");
Serial.print(distCenter);
Serial.print(" R:");
Serial.println(distRight);
// 导航决策(左手定则)
if(distLeft > SAFE_DISTANCE) {
// 优先左转
turnLeft();
}
else if(distCenter > SAFE_DISTANCE) {
// 其次直行
moveForward();
}
else if(distRight > SAFE_DISTANCE) {
// 最后右转
turnRight();
}
else {
// 死胡同:180度掉头
turnLeft();
delay(TURN_DELAY * 2); // 双倍时间实现180度转
}
delay(100); // 控制循环频率
}
```
### 代码说明
1. **传感器布局**:
- 左侧传感器:检测左侧墙壁距离
- 中央传感器:检测前方障碍物
- 右侧传感器:检测右侧墙壁距离
2. **导航策略(左手定则)**:
```mermaid
graph TD
A[读取三路距离] --> B{左侧通畅?}
B -->|是| C[左转]
B -->|否| D{前方通畅?}
D -->|是| E[直行]
D -->|否| F{右侧通畅?}
F -->|是| G[右转]
F -->|否| H[掉头]
```
3. **关键参数**:
- `SAFE_DISTANCE`:安全距离阈值(建议15-25cm)
- `TURN_DELAY`:90度转弯所需时间(需实验校准)
- `SPEED`:PWM电机速度(0-255)
4. **电机控制逻辑**:
- 左转:右轮前进 + 左轮后退
- 右转:左轮前进 + 右轮后退
- 直行:双轮同速前进
- 掉头:连续两次左转
### 硬件连接建议
```
超声波传感器:
左:Trig-9, Echo-8
中:Trig-11, Echo-10
右:Trig-13, Echo-12
L298N电机驱动:
enA-5, in1-4, in2-3 (左电机)
enB-6, in3-2, in4-7 (右电机)
```
### 优化建议
1. **增加滤波算法**:在`getDistance()`函数中添加中值滤波,减少误测
```cpp
int filteredDistance(int trig, int echo) {
int readings[5];
for(int i=0; i<5; i++) {
readings[i] = getDistance(trig, echo);
delay(10);
}
// 排序取中值
sort(readings, 5);
return readings[2];
}
```
2. **动态速度控制**:根据前方距离调整速度
```cpp
if(distCenter < 30) {
analogWrite(enA, SPEED * 0.6);
analogWrite(enB, SPEED * 0.6);
}
```
3. **死循环避免**:添加回转计数器,防止同一位置反复转向
### 调试技巧
1. 通过串口监视器实时查看距离数据
2. 用胶带标记地面测试转弯角度
3. 逐步增加速度直到稳定运行
4. 在墙角放置反光物增强超声波反射





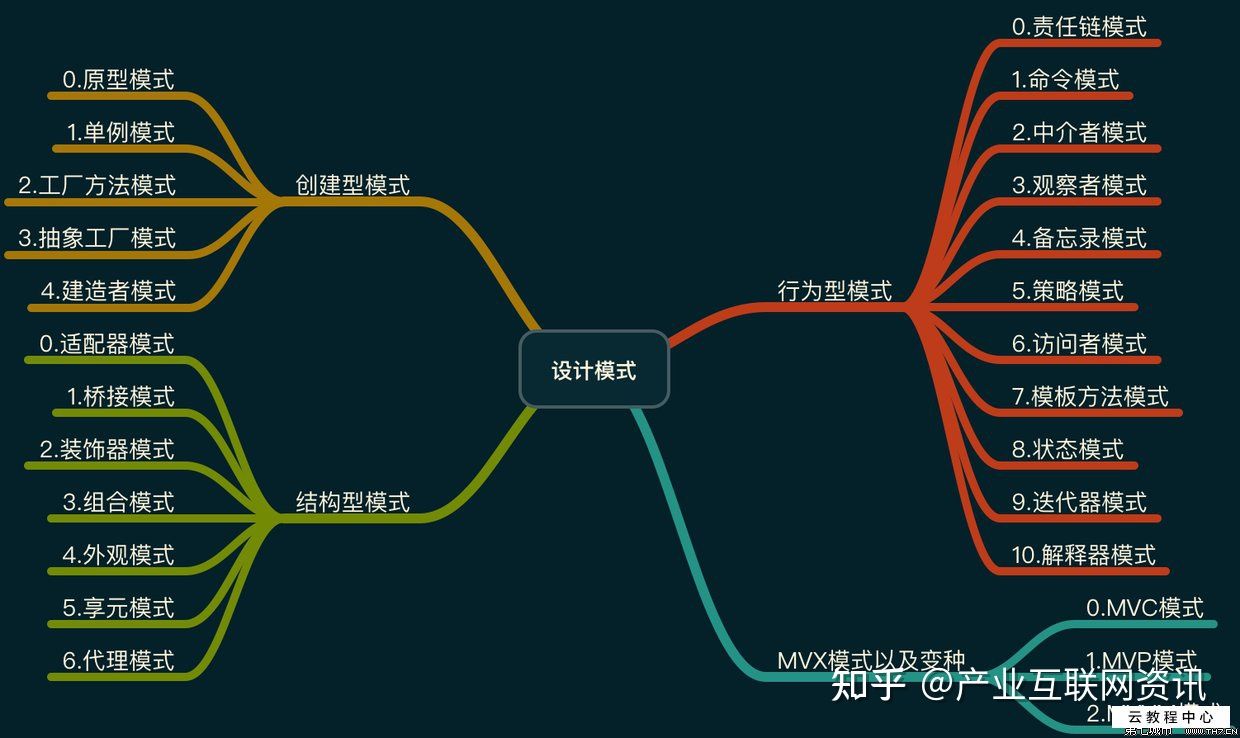
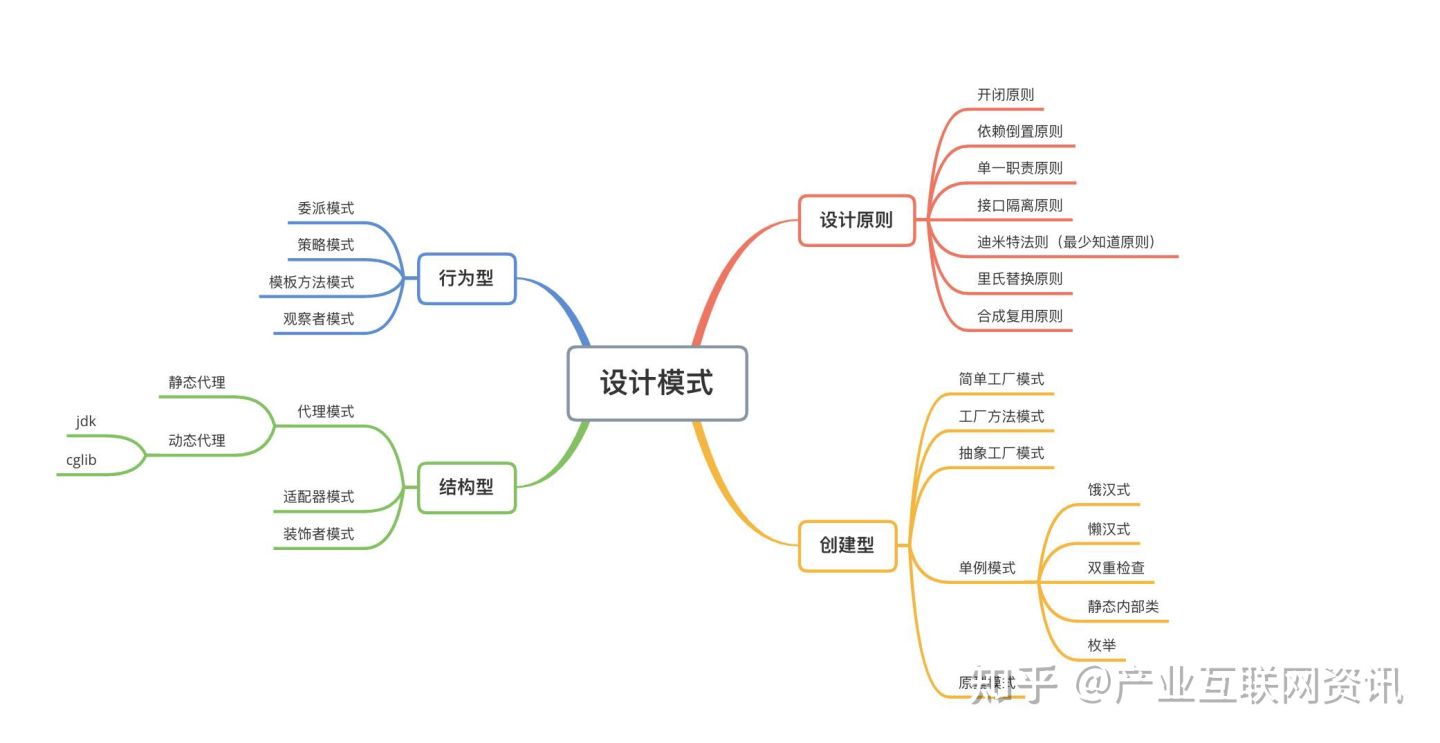
 本文探讨了设计模式在编程中的使用疑问,指出设计模式并非解决所有问题的银弹,而是特定问题的最佳实践。文章建议新手从了解常见设计问题出发,避免为用模式而用。同时,设计模式虽能提升代码扩展性,但也可能导致过度设计和复杂性增加。学习设计模式有助于应对面试、理解和阅读源码,但何时何地使用需谨慎判断。
本文探讨了设计模式在编程中的使用疑问,指出设计模式并非解决所有问题的银弹,而是特定问题的最佳实践。文章建议新手从了解常见设计问题出发,避免为用模式而用。同时,设计模式虽能提升代码扩展性,但也可能导致过度设计和复杂性增加。学习设计模式有助于应对面试、理解和阅读源码,但何时何地使用需谨慎判断。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









