






欧式变换
欧式变换是最简单的3D变换方式,由旋转和平移组成。它保持了向量的长度和夹角,相当于我们把一个刚体原封不动的进行了移动或旋转,不改变它自身的样子。其矩阵表现形式如下所示:
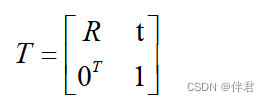
其中,旋转矩阵R为行列式为1的正交矩阵。t为平移矩阵。
相似变换
相似变换比欧式变换多了一个自由度,它允许物体进行均匀缩放,其矩阵表示为:
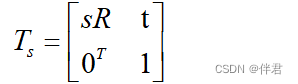
注意,旋转部分多了一个缩放因子s,表示我们在对向量旋转之后,可以在x,y,z三个坐标上进行均匀缩放。由于含有缩放,相似变换不再保持图形的面积不变。
仿射变换
仿射变换的矩阵形式如下:
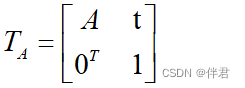
与欧式变换不同的是,仿射变换只要求A是一个可逆矩阵,而不必是正交矩阵。放射变换也叫正交投影。经过仿射变换之后,立方体就不再是方的了,但是各个面仍然是平行四边形。
射影变换
射影变换是最一般的变换,它的矩阵形式为:
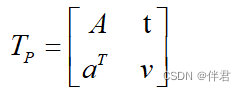
它的左上角为可逆矩阵A,右上角为平移矩阵t,左下角为缩放aT。由于采用了齐次坐标,当v≠0时,我们可以对整个矩阵除以v得到一个右下角为1的矩阵;否则得到右下角为0的矩阵。因此,2D的射影变换一共有8个自由度,3D则有15个自由度。从真实世界到相机照片的变换可以看成一个射影变换。
总结
| 变换名称 | 自由度 | 不变性质 |
|---|---|---|
| 欧式变换 | 6 | 长度、夹角、体积 |
| 相似变换 | 7 | 体积比 |
| 仿射变换 | 12 | 平行性、体积比 |
| 射影变换 | 15 | 接触平面的相交和相切 |

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









