







一、概述
在现实控制中,被控系统并非是线性时不变的,往往需要动态调整PID的参数,而模糊控制正好能够满足这一需求,
二、原理
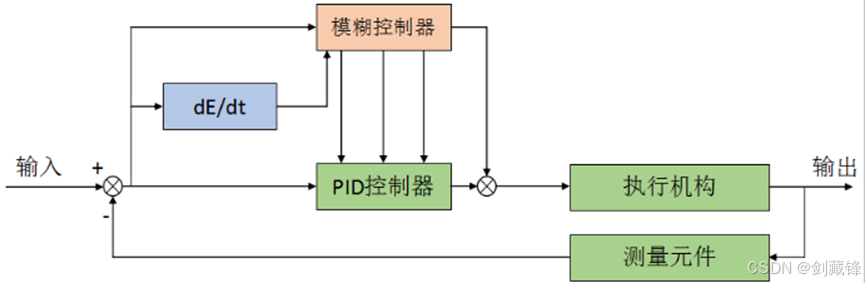
模糊PID控制流程如下图所示,把目标值 Xtarget 与输出值 Xout 的误差 e 与 e 的变化率 de/dt 作为模糊控制器的输入,模糊控制器先对输入进行模糊化处理,接着进行模糊推理,最后把模糊推理的结果进行去模糊处理输出PID控制器的三个参数 kp, ki, kd,从而达到对PID控制器参数自适应整定的效果。
在现实控制中,被控系统并非是线性时不变的,往往需要动态调整PID的参数,而模糊控制正好能够满足这一需求,
模糊PID控制流程如下图所示,把目标值 Xtarget 与输出值 Xout 的误差 e 与 e 的变化率 de/dt 作为模糊控制器的输入,模糊控制器先对输入进行模糊化处理,接着进行模糊推理,最后把模糊推理的结果进行去模糊处理输出PID控制器的三个参数 kp, ki, kd,从而达到对PID控制器参数自适应整定的效果。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























