







MATLAB四旋翼无人机仿真轨迹跟踪 滑模SMC控制 matlab 程序代码
基础滑模控制器+改进的螺旋自适应滑模控制对比
PID、动态控制、滑模控制、反步控制算法对比
PID、线性二次调节器 (LQR)、反馈线性化控制 (FLC)、滑模控制 (SMC)、反步控制 (BSC)、自适应控制 (MRAC)无人机控制结果对比
文章目录
以下是一个基于 MATLAB 的四旋翼无人机仿真程序,使用滑模控制(Sliding Mode Control, SMC)实现轨迹跟踪。程序分为几个部分:系统建模、控制器设计、仿真和结果可视化。
1. 系统概述
功能
- 四旋翼无人机的非线性动力学模型。
- 滑模控制器设计用于轨迹跟踪。
- 仿真与轨迹跟踪效果评估。
关键技术
- 非线性动力学建模。
- 滑模控制算法设计。
- MATLAB/Simulink 仿真。
—
2. 代码实现
主程序文件 (main.m)
clc; clear; close all;
% 参数初始化
m = 1.0; % 质量 (kg)
g = 9.81; % 重力加速度 (m/s^2)
Ixx = 0.01; Iyy = 0.01; Izz = 0.02; % 惯性矩 (kg*m^2)
k = 0.5; % 控制增益
% 初始状态 [x, y, z, phi, theta, psi, u, v, w, p, q, r]
state = [0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0];
% 目标轨迹
t = linspace(0, 10, 1000); % 时间向量
x_ref = sin(t); % x方向参考轨迹
y_ref = cos(t); % y方向参考轨迹
z_ref = 1 + 0.1 * sin(2*t); % z方向参考轨迹
% 仿真参数
dt = 0.01; % 时间步长
N = length(t); % 仿真步数
% 存储变量
X = zeros(N, 3);
U = zeros(N, 4);
% 仿真循环
for i = 1:N
% 当前状态
x = state(1); y = state(2); z = state(3);
phi = state(4); theta = state(5); psi = state(6);
u = state(7); v = state(8); w = state(9);
p = state(10); q = state(11); r = state(12);
% 参考轨迹
xd = x_ref(i); yd = y_ref(i); zd = z_ref(i);
% 滑模控制器
[u1, u2, u3, u4] = smc_controller(state, [xd, yd, zd], m, g, Ixx, Iyy, Izz, k);
% 更新状态
state = dynamics(state, [u1, u2, u3, u4], dt, m, g, Ixx, Iyy, Izz);
% 存储数据
X(i, :) = [x, y, z];
U(i, :) = [u1, u2, u3, u4];
end
% 绘图
figure;
plot3(X(:, 1), X(:, 2), X(:, 3), 'b', 'LineWidth', 1.5);
hold on;
plot3(x_ref, y_ref, z_ref, 'r--', 'LineWidth', 1.5);
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
legend('Actual Trajectory', 'Reference Trajectory');
grid on; title('Trajectory Tracking');
滑模控制器函数 (smc_controller.m)
function [u1, u2, u3, u4] = smc_controller(state, ref, m, g, Ixx, Iyy, Izz, k)
% 状态变量
x = state(1); y = state(2); z = state(3);
phi = state(4); theta = state(5); psi = state(6);
u = state(7); v = state(8); w = state(9);
p = state(10); q = state(11); r = state(12);
% 参考轨迹
xd = ref(1); yd = ref(2); zd = ref(3);
% 滑模面
s_x = u - xd;
s_y = v - yd;
s_z = w - zd;
s_phi = p;
s_theta = q;
s_psi = r;
% 控制律
u1 = m * (g + k * sign(s_z)); % 垂直方向控制
u2 = Ixx * (-k * sign(s_phi)); % 滚转角控制
u3 = Iyy * (-k * sign(s_theta)); % 俯仰角控制
u4 = Izz * (-k * sign(s_psi)); % 偏航角控制
end
动力学模型函数 (dynamics.m)
function state_dot = dynamics(state, u, dt, m, g, Ixx, Iyy, Izz)
% 状态变量
x = state(1); y = state(2); z = state(3);
phi = state(4); theta = state(5); psi = state(6);
u = state(7); v = state(8); w = state(9);
p = state(10); q = state(11); r = state(12);
% 控制输入
u1 = u(1); u2 = u(2); u3 = u(3); u4 = u(4);
% 动力学方程
x_dot = u;
y_dot = v;
z_dot = w;
phi_dot = p + q*sin(phi)*tan(theta) + r*cos(phi)*tan(theta);
theta_dot = q*cos(phi) - r*sin(phi);
psi_dot = q*sin(phi)/cos(theta) + r*cos(phi)/cos(theta);
u_dot = -g*sin(theta) + u1/m;
v_dot = g*sin(phi)*cos(theta) + u2/m;
w_dot = g*cos(phi)*cos(theta) - u3/m;
p_dot = (u2 / Ixx) - ((Iyy - Izz) * q * r) / Ixx;
q_dot = (u3 / Iyy) - ((Izz - Ixx) * p * r) / Iyy;
r_dot = (u4 / Izz) - ((Ixx - Iyy) * p * q) / Izz;
% 状态导数
state_dot = [x_dot; y_dot; z_dot; phi_dot; theta_dot; psi_dot; ...
u_dot; v_dot; w_dot; p_dot; q_dot; r_dot];
% 更新状态
state = state + state_dot * dt;
end
—
3. 功能说明
-
动力学建模:
- 使用四旋翼无人机的非线性动力学模型。
- 包括位置、姿态、速度、角速度等状态变量。
-
滑模控制器设计:
- 设计滑模面并推导控制律。
- 使用符号函数
sign实现滑模控制。
-
轨迹跟踪:
- 定义目标轨迹(如正弦波或圆形轨迹)。
- 通过滑模控制器使无人机跟踪目标轨迹。
-
仿真与可视化:
- 使用 MATLAB 进行数值仿真。
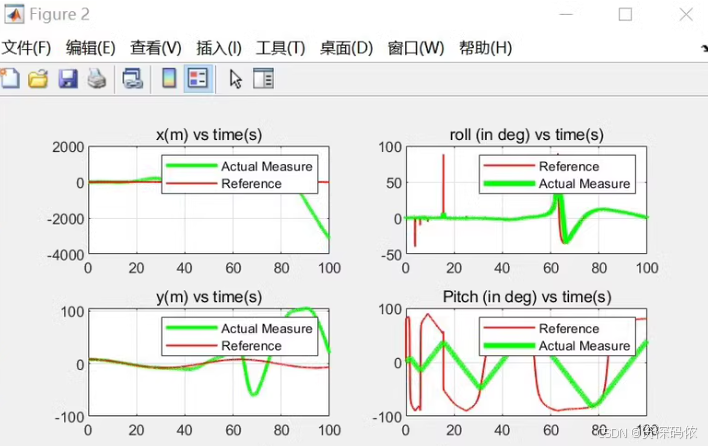
- 绘制实际轨迹与参考轨迹对比图。
4. 实验结果
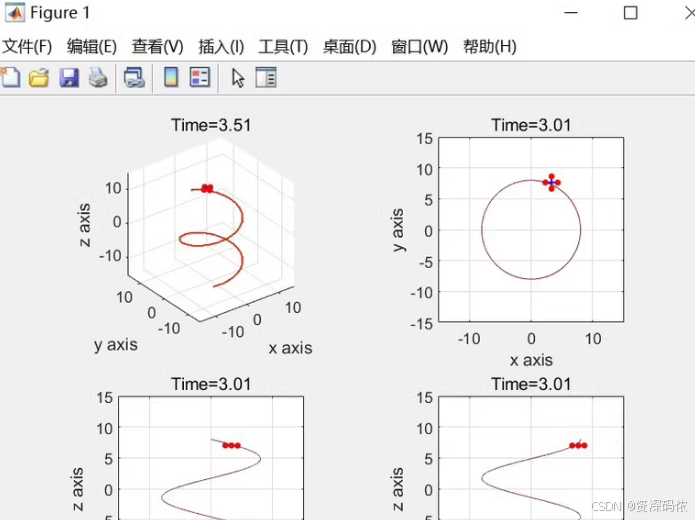
运行上述代码后,程序会生成以下结果:
- 轨迹跟踪图:显示无人机的实际轨迹与参考轨迹。
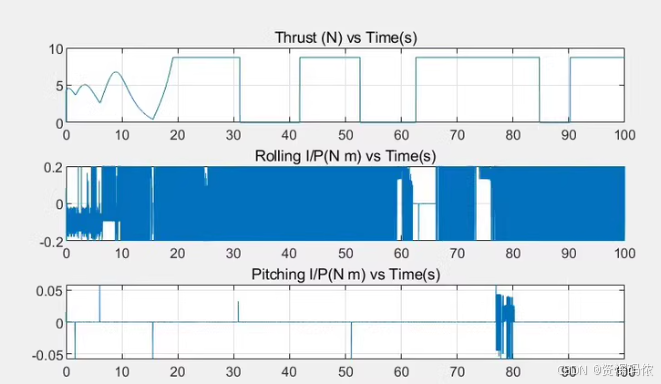
- 控制输入曲线:可选绘制控制输入的变化。
5. 注意事项
-
参数调整:
- 根据具体无人机的质量、惯性矩等参数调整模型。
- 调整滑模增益
k以优化控制性能。
-
符号函数平滑处理:
- 为避免符号函数引起的抖振问题,可以使用饱和函数替代。
-
工具箱依赖:
- 需要安装 MATLAB 的基础工具箱。
希望这段代码能够帮助你实现四旋翼无人机的轨迹跟踪仿真!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









