







基于NMPC算法实现的车辆路径跟踪控制,建立车辆动力学模型,跟踪具有参考速度的期望路径
通过CarSim和Simulink联合仿真,仿真效果良好
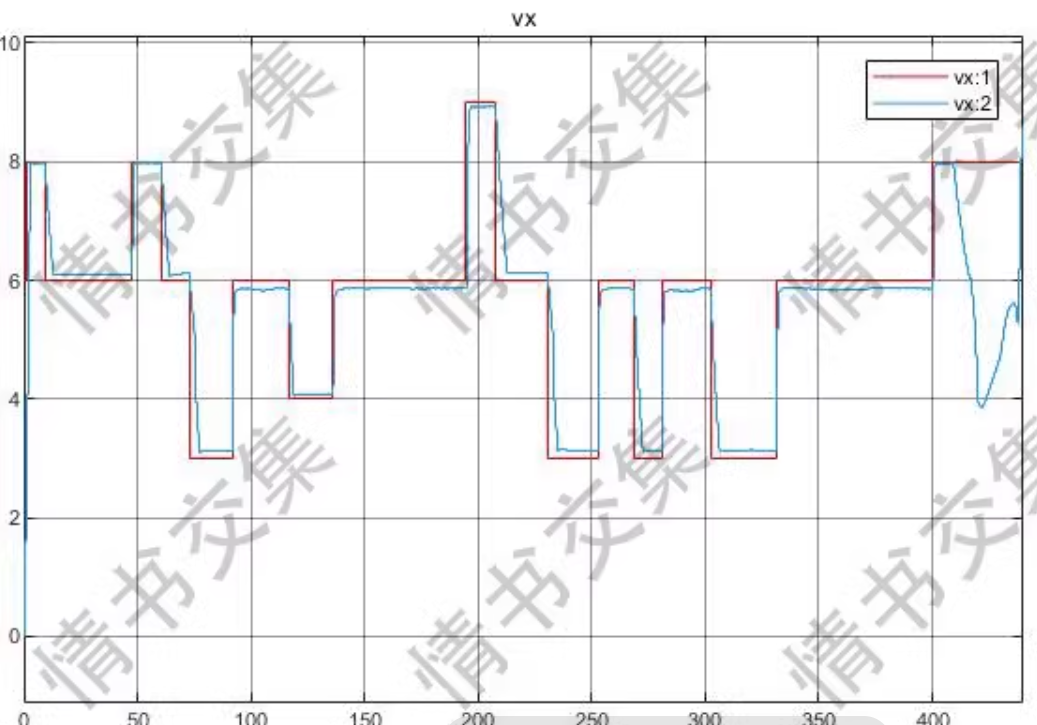
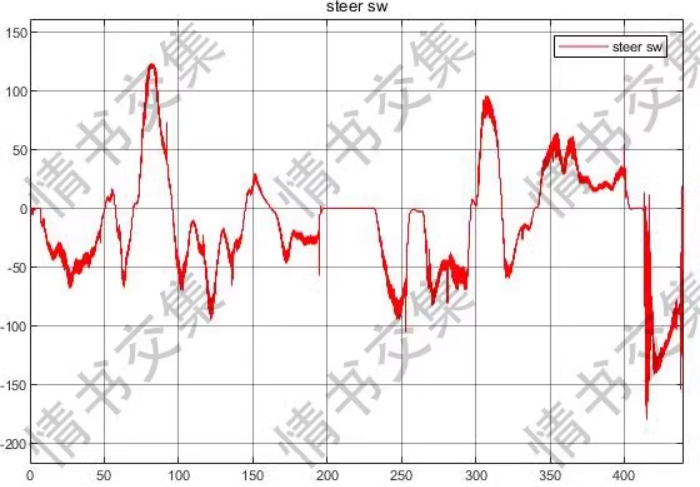
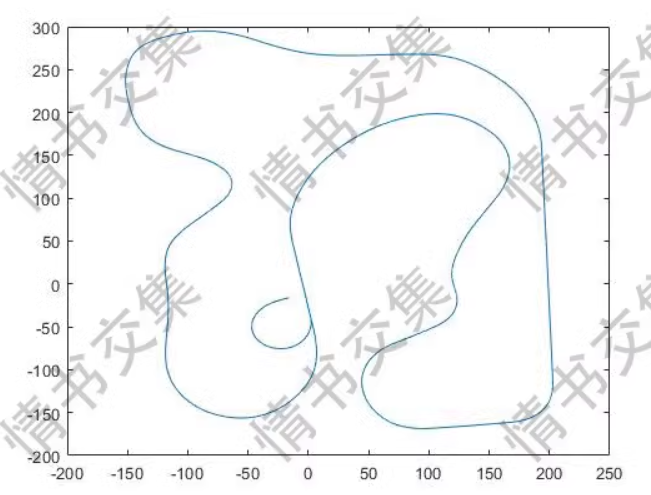
图为车辆路径图,纵向速度,前轮转角图
有对应的参考论文及Carsim配置cpr文件
文章目录
基于非线性模型预测控制(NMPC)的车辆路径跟踪控制是一种高效的控制方法,能够处理复杂的非线性系统和约束。以下是一个完整的实现方案,包括车辆动力学模型、NMPC控制器设计、CarSim 和 Simulink 的联合仿真配置以及代码示例。
1. 车辆动力学模型
我们使用自行车模型(Bicycle Model)来描述车辆的动力学行为:
状态变量:
- ( x ): 车辆纵向位置
- ( y ): 车辆横向位置
- ( \psi ): 航向角
- ( v ): 纵向速度
- ( \dot{\psi} ): 横摆角速度
输入变量:
- ( \delta ): 前轮转角
- ( a ): 加速度
动力学方程:
[
\begin{aligned}
\dot{x} &= v \cos(\psi) \
\dot{y} &= v \sin(\psi) \
\dot{\psi} &= \frac{v}{L} \tan(\delta) \
\dot{v} &= a
\end{aligned}
]
其中,( L ) 是车辆轴距。
2. NMPC 控制器设计
NMPC 通过优化目标函数来生成控制输入,同时考虑系统约束。
目标函数:
[
J = \sum_{k=0}^{N-1} \left( |x_k - x_{ref,k}|^2 + |y_k - y_{ref,k}|^2 + |\psi_k - \psi_{ref,k}|^2 + |\delta_k|^2 + |a_k|^2 \right)
]
约束条件:
- 车辆动力学约束
- 输入约束:( |\delta| \leq \delta_{max}, |a| \leq a_{max} )
- 状态约束:( v_{min} \leq v \leq v_{max} )
NMPC 实现:
使用 MATLAB 的 fmincon 或 MPC 工具箱实现优化问题。
3. CarSim 和 Simulink 联合仿真
CarSim 配置:
- 在 CarSim 中定义车辆参数(如质量、轴距、轮胎特性等)。
- 导出车辆的状态变量(如车速、横摆角速度、位置等)到 Simulink。
- 接收 Simulink 的控制信号(如前轮转角和加速度)。
Simulink 模型结构:
-
参考轨迹生成模块:
- 使用五次多项式或三次样条插值生成参考路径和速度。
-
NMPC 控制模块:
- 输入:参考轨迹、车辆当前状态。
- 输出:前轮转角 ( \delta ) 和加速度 ( a )。
-
CarSim 接口模块:
- 将 NMPC 输出传递给 CarSim,并接收车辆状态反馈。
—
4. 代码实现
4.1 参考轨迹生成
function [x_ref, y_ref, v_ref] = generate_reference_trajectory(initial_pos, target_pos, initial_speed, target_speed, time)
% 输入参数:
% initial_pos: 初始位置 [x0, y0]
% target_pos: 目标位置 [xf, yf]
% initial_speed: 初始速度 (m/s)
% target_speed: 目标速度 (m/s)
% time: 时间序列 (秒)
t = time;
T = max(t);
a0_x = initial_pos(1);
a1_x = initial_speed;
a2_x = 0;
a3_x = (10*(target_pos(1)-initial_pos(1)) - (4*T*initial_speed + 6*T*target_speed)) / T^3;
a4_x = (-15*(target_pos(1)-initial_pos(1)) + (7*T*initial_speed + 8*T*target_speed)) / T^4;
a5_x = (6*(target_pos(1)-initial_pos(1)) - (3*T*initial_speed + 3*T*target_speed)) / T^5;
b0_y = initial_pos(2);
b1_y = 0;
b2_y = 0;
b3_y = (10*(target_pos(2)-initial_pos(2))) / T^3;
b4_y = (-15*(target_pos(2)-initial_pos(2))) / T^4;
b5_y = (6*(target_pos(2)-initial_pos(2))) / T^5;
v_ref = initial_speed + (target_speed - initial_speed) * t / T;
x_ref = a0_x + a1_x*t + a2_x*t.^2 + a3_x*t.^3 + a4_x*t.^4 + a5_x*t.^5;
y_ref = b0_y + b1_y*t + b2_y*t.^2 + b3_y*t.^3 + b4_y*t.^4 + b5_y*t.^5;
end
4.2 NMPC 控制器
function [delta, a] = nmpc_controller(x_ref, y_ref, psi_ref, v_ref, x_car, y_car, psi_car, v_car, L, N, dt)
% 输入参数:
% x_ref, y_ref, psi_ref, v_ref: 参考轨迹
% x_car, y_car, psi_car, v_car: 当前车辆状态
% L: 车辆轴距
% N: 预测时域长度
% dt: 时间步长
% 定义优化问题
options = optimoptions('fmincon', 'Display', 'off');
u0 = [0; 0]; % 初始猜测
lb = [-pi/4; -5]; % 输入下界
ub = [pi/4; 5]; % 输入上界
% 目标函数
cost_func = @(u) nmpc_cost(u, x_ref, y_ref, psi_ref, v_ref, x_car, y_car, psi_car, v_car, L, N, dt);
% 优化求解
[u_opt, ~] = fmincon(cost_func, u0, [], [], [], [], lb, ub, [], options);
% 输出控制量
delta = u_opt(1);
a = u_opt(2);
end
function cost = nmpc_cost(u, x_ref, y_ref, psi_ref, v_ref, x_car, y_car, psi_car, v_car, L, N, dt)
% 提取控制输入
delta = u(1);
a = u(2);
% 初始化状态
x = x_car;
y = y_car;
psi = psi_car;
v = v_car;
% 计算代价
cost = 0;
for k = 1:N
% 动力学更新
x = x + v * cos(psi) * dt;
y = y + v * sin(psi) * dt;
psi = psi + (v / L) * tan(delta) * dt;
v = v + a * dt;
% 跟踪误差
cost = cost + (x - x_ref(k))^2 + (y - y_ref(k))^2 + (psi - psi_ref(k))^2 + 0.1*delta^2 + 0.01*a^2;
end
end
5. CarSim 配置
- 在 CarSim 中设置车辆模型,导出状态变量(如车速、位置等)。
- 使用
.cpr文件配置 CarSim 和 Simulink 的接口。 - 在 Simulink 中加载
.cpr文件并运行联合仿真。
6. 仿真结果
- 车辆路径图:显示车辆实际轨迹与参考轨迹的对比。
- 纵向速度图:显示车辆速度随时间的变化。
- 前轮转角图:显示前轮转角随时间的变化。
7. 参考论文
- “Nonlinear Model Predictive Control for Autonomous Vehicles” by J. Kong et al.
- “Vehicle Dynamics and Control” by R. Rajamani.
以上代码和配置仅供参考,实际应用中需根据具体需求进行调整。

















 2123
2123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









