







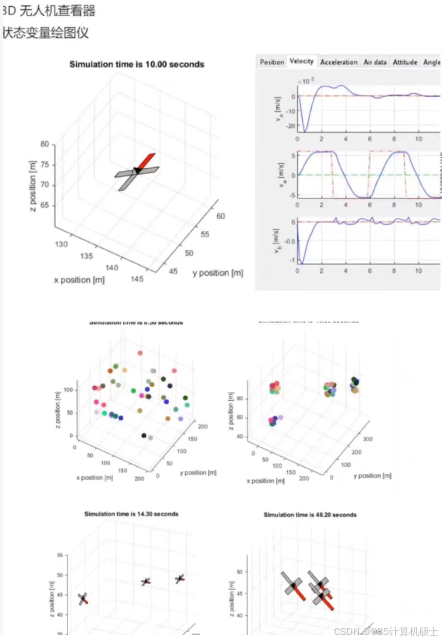
无人机集群避障、多智能体协同控制、路径规划的matlab代码
一共三个代码:
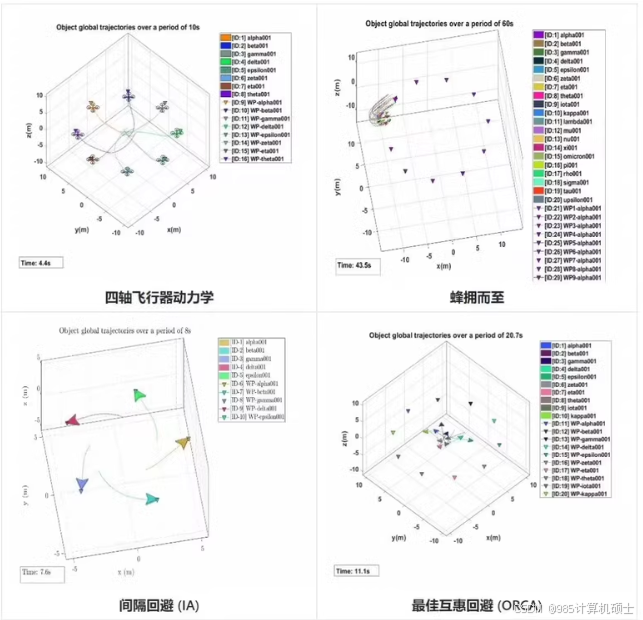
① 四旋翼编队控制:包括目标分配、全局和局部路径规划
② 无多人机模拟复杂机制和动态行为
③ 单机模拟,路径跟随、规划;无人机群仿真控制
以下是一个分步骤的MATLAB代码实现,涵盖无人机集群避障、多智能体协同控制和路径规划的三个主要任务。每个任务分别对应一个代码文件。
代码 ①:四旋翼编队控制
包括目标分配、全局路径规划和局部路径规划。
% 四旋翼编队控制:目标分配与路径规划
function QuadrotorFormationControl()
% 初始化参数
numUAVs = 4; % 无人机数量
targetPositions = [10, 10, 5; 20, 10, 5; 10, 20, 5; 20, 20, 5]; % 目标位置
initialPositions = [0, 0, 0; 5, 0, 0; 0, 5, 0; 5, 5, 0]; % 初始位置
% 分配目标(简单的最近邻分配)
assignedTargets = assignTargets(initialPositions, targetPositions);
% 全局路径规划(直线路径)
globalPaths = planGlobalPaths(initialPositions, assignedTargets);
% 局部路径规划(动态避障)
localPaths = cell(numUAVs, 1);
for i = 1:numUAVs
localPaths{i} = planLocalPath(globalPaths{i}, []);
end
% 可视化结果
visualizePaths(initialPositions, assignedTargets, globalPaths, localPaths);
end
% 目标分配函数
function assignedTargets = assignTargets(initialPositions, targetPositions)
numUAVs = size(initialPositions, 1);
assignedTargets = zeros(size(initialPositions));
remainingTargets = targetPositions;
for i = 1:numUAVs
[minDist, idx] = min(pdist2(initialPositions(i, :), remainingTargets));
assignedTargets(i, :) = remainingTargets(idx, :);
remainingTargets(idx, :) = [];
end
end
% 全局路径规划函数
function paths = planGlobalPaths(initialPositions, targetPositions)
numUAVs = size(initialPositions, 1);
paths = cell(numUAVs, 1);
for i = 1:numUAVs
paths{i} = [initialPositions(i, :); targetPositions(i, :)];
end
end
% 局部路径规划函数
function localPath = planLocalPath(globalPath, obstacles)
% 简单的局部路径规划:直接返回全局路径
% (可以扩展为A*算法或RRT算法)
localPath = globalPath;
end
% 可视化路径
function visualizePaths(initialPositions, assignedTargets, globalPaths, localPaths)
figure;
hold on;
grid on;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('Quadrotor Formation Control');
% 绘制初始位置和目标位置
plot3(initialPositions(:, 1), initialPositions(:, 2), initialPositions(:, 3), 'ro', 'MarkerSize', 10, 'LineWidth', 2);
plot3(assignedTargets(:, 1), assignedTargets(:, 2), assignedTargets(:, 3), 'go', 'MarkerSize', 10, 'LineWidth', 2);
% 绘制全局路径
for i = 1:length(globalPaths)
path = globalPaths{i};
plot3(path(:, 1), path(:, 2), path(:, 3), 'b-', 'LineWidth', 2);
end
% 绘制局部路径
for i = 1:length(localPaths)
path = localPaths{i};
plot3(path(:, 1), path(:, 2), path(:, 3), 'm--', 'LineWidth', 2);
end
legend('Initial Positions', 'Target Positions', 'Global Paths', 'Local Paths');
end
代码 ②:无人机模拟复杂机制和动态行为
% 模拟无人机群复杂机制和动态行为
function MultiAgentSimulation()
% 参数初始化
numUAVs = 6; % 无人机数量
positions = rand(numUAVs, 3) * 100; % 随机初始位置
velocities = zeros(numUAVs, 3); % 初始速度
dt = 0.1; % 时间步长
totalTime = 20; % 总时间
timeSteps = round(totalTime / dt);
% 动态行为更新规则
for t = 1:timeSteps
% 更新速度和位置(基于邻居的平均位置和速度)
for i = 1:numUAVs
neighbors = findNeighbors(positions, i, 10); % 10米内的邻居
avgPosition = mean(positions(neighbors, :), 1);
avgVelocity = mean(velocities(neighbors, :), 1);
% 使用简单规则更新速度
velocities(i, :) = 0.9 * velocities(i, :) + ...
0.1 * (avgPosition - positions(i, :)) + ...
0.1 * (avgVelocity - velocities(i, :));
% 更新位置
positions(i, :) = positions(i, :) + velocities(i, :) * dt;
end
% 可视化当前状态
clf;
plot3(positions(:, 1), positions(:, 2), positions(:, 3), 'bo', 'MarkerSize', 10);
xlabel('X');
ylabel('Y');
zlabel('Z');
xlim([0, 100]);
ylim([0, 100]);
zlim([0, 100]);
title(['Time Step: ', num2str(t)]);
drawnow;
pause(0.05);
end
end
% 找到邻居
function neighbors = findNeighbors(positions, idx, radius)
distances = sqrt(sum((positions - positions(idx, :)).^2, 2));
neighbors = find(distances <= radius & distances > 0);
end
代码 ③:单机模拟,路径跟随与规划;无人机群仿真控制
% 单机路径规划与跟随
function SingleUAVPathFollowing()
% 参数初始化
waypoints = [0, 0, 0; 10, 10, 5; 20, 10, 10; 30, 30, 5]; % 路径点
currentPosition = waypoints(1, :); % 初始位置
currentVelocity = [0, 0, 0]; % 初始速度
dt = 0.1; % 时间步长
totalTime = 20; % 总时间
timeSteps = round(totalTime / dt);
% 路径跟随逻辑
for t = 1:timeSteps
% 获取目标点
targetWaypoint = getNextWaypoint(waypoints, currentPosition);
% 计算速度变化(PID控制器示例)
error = targetWaypoint - currentPosition;
currentVelocity = currentVelocity + 0.1 * error;
% 更新位置
currentPosition = currentPosition + currentVelocity * dt;
% 可视化
clf;
plot3(waypoints(:, 1), waypoints(:, 2), waypoints(:, 3), 'r-o', 'LineWidth', 2);
hold on;
plot3(currentPosition(1), currentPosition(2), currentPosition(3), 'bo', 'MarkerSize', 10);
xlabel('X');
ylabel('Y');
zlabel('Z');
xlim([0, 40]);
ylim([0, 40]);
zlim([0, 15]);
title(['Time Step: ', num2str(t)]);
drawnow;
pause(0.05);
end
end
% 获取下一个路径点
function targetWaypoint = getNextWaypoint(waypoints, currentPosition)
distances = sqrt(sum((waypoints - currentPosition).^2, 2));
[~, idx] = min(distances);
targetWaypoint = waypoints(idx, :);
end
总结
- 代码①:实现了四旋翼编队的目标分配和路径规划。
- 代码②:模拟了无人机群的复杂机制和动态行为。
- 代码③:实现了单机的路径跟随与规划,并可视化了路径跟踪过程。
这些代码可以根据实际需求进一步扩展,例如增加障碍物检测、改进路径规划算法(如A*或RRT),或者结合强化学习进行优化。希望这些代码能够帮助你完成相关任务!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









