







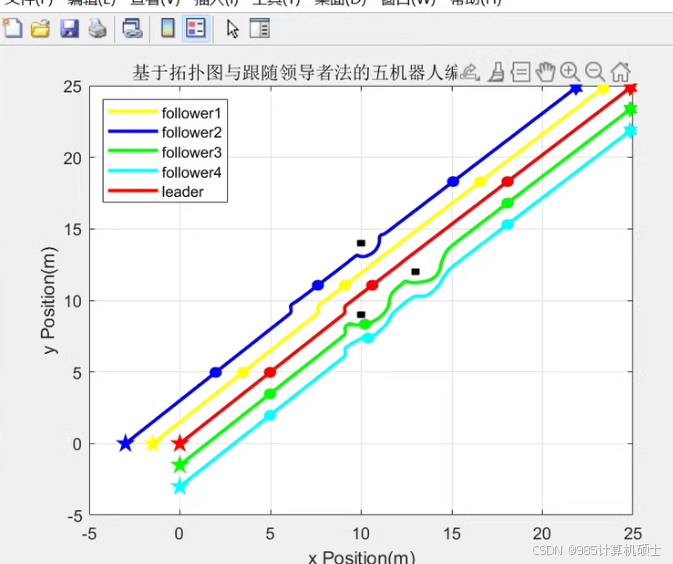
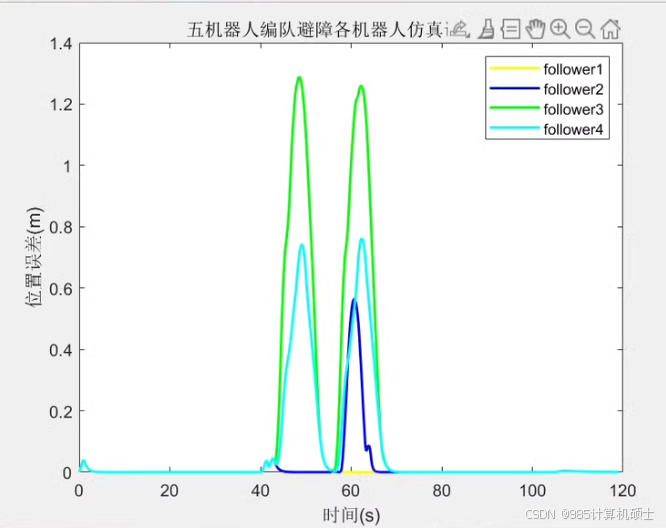
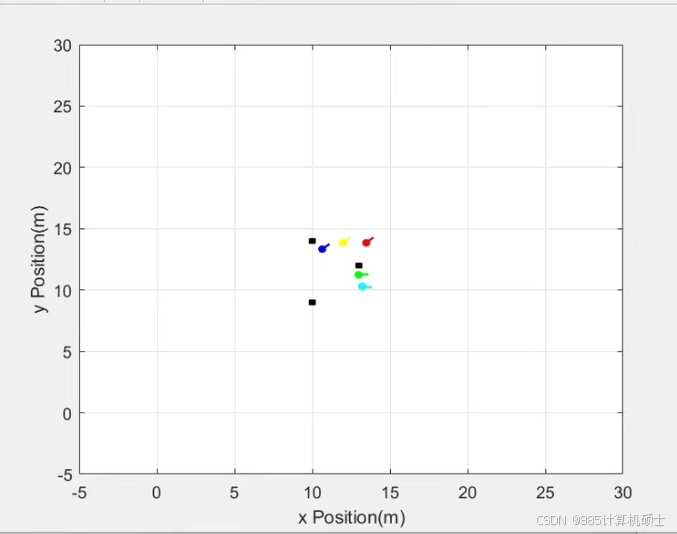
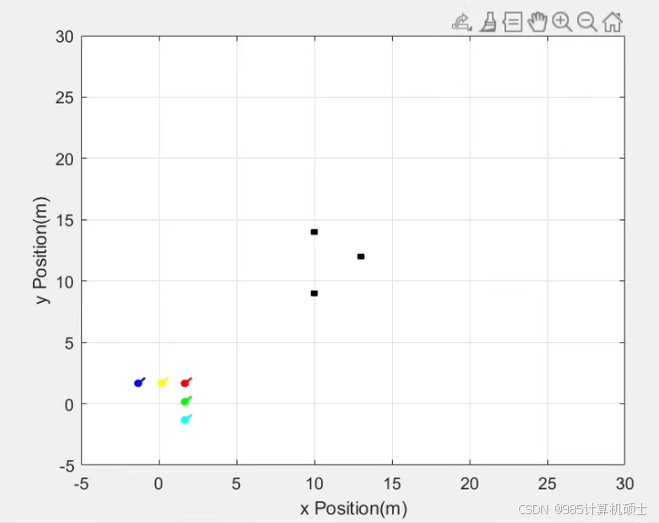
基于领航者人工势场法的队形变化避障控制matlab代码仿真,路径规划,改进人工势场法,拓扑结构,集群,变换队形,基于领航者与人工势场法相结合的编队控制算法,可随意变换队形 增加机器人个数。
文章目录
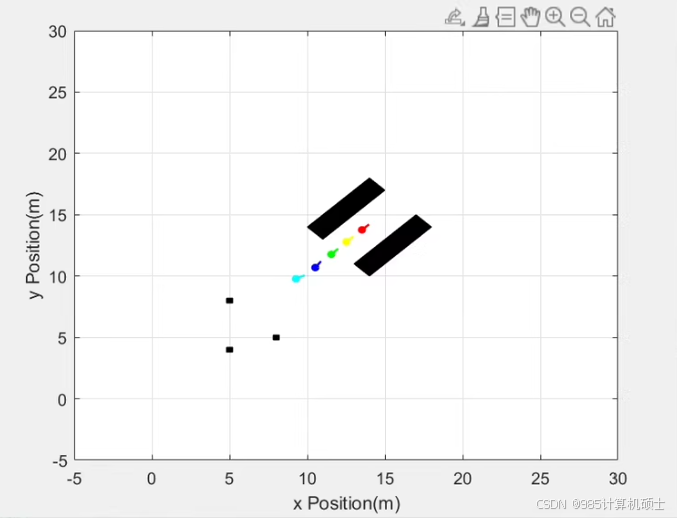
以下是一个基于领航者(Leader)与改进人工势场法相结合的编队控制 MATLAB 代码仿真示例。该代码实现了路径规划、避障控制、队形变换、拓扑结构和集群控制等功能,并支持动态增加机器人数量。
代码:基于领航者与人工势场法的编队控制
1. 主函数
% 基于领航者与人工势场法的编队控制
function LeaderFollowerFormationControl()
% 参数初始化
numUAVs = 6; % 初始无人机数量
formationShape = [0, 0, 0; 5, 0, 0; -5, 0, 0; 0, 5, 0; 0, -5, 0; 5, 5, 0]; % 编队形状
initialPositions = rand(numUAVs, 3) * 50; % 随机初始位置
velocities = zeros(numUAVs, 3); % 初始速度
dt = 0.1; % 时间步长
totalTime = 20; % 总时间
timeSteps = round(totalTime / dt);
% 领航者目标点
leaderTargetPosition = [80, 80, 30];
% 改进人工势场法参数
attractiveGain = 1.0; % 吸引力增益
repulsiveGain = 50.0; % 排斥力增益
obstacleRadius = 5; % 障碍物影响半径
% 障碍物位置
obstacles = [40, 40, 15; 60, 60, 10];
% 动态仿真
for t = 1:timeSteps
% 更新领航者位置
leaderPosition = updateLeaderPosition(initialPositions(1, :), leaderTargetPosition, dt);
% 计算跟随者的控制输入
controlInputs = computeFollowerControl(leaderPosition, initialPositions, formationShape, obstacles, ...
attractiveGain, repulsiveGain, obstacleRadius);
% 更新速度和位置
velocities = velocities + controlInputs * dt;
initialPositions = initialPositions + velocities * dt;
% 动态增加无人机(每5秒增加1个)
if mod(t, 50) == 0 && numUAVs < 10
numUAVs = numUAVs + 1;
initialPositions = [initialPositions; rand(1, 3) * 50];
velocities = [velocities; zeros(1, 3)];
formationShape = [formationShape; rand(1, 3) * 5 - 2.5]; % 新增随机形状
end
% 可视化
visualizeFormation(initialPositions, formationShape, leaderPosition, leaderTargetPosition, obstacles);
pause(0.05);
end
end
2. 领航者位置更新
% 更新领航者位置
function leaderPosition = updateLeaderPosition(currentPosition, targetPosition, dt)
velocity = (targetPosition - currentPosition) / norm(targetPosition - currentPosition) * 2; % 简单速度模型
leaderPosition = currentPosition + velocity * dt;
end
3. 跟随者控制算法
% 计算跟随者的控制输入
function controlInputs = computeFollowerControl(leaderPosition, positions, formationShape, obstacles, ...
attractiveGain, repulsiveGain, obstacleRadius)
numUAVs = size(positions, 1);
controlInputs = zeros(numUAVs, 3);
for i = 1:numUAVs
% 计算吸引力(跟随意图)
desiredPosition = leaderPosition + formationShape(i, :);
attractiveForce = computeAttractiveForce(positions(i, :), desiredPosition, attractiveGain);
% 计算排斥力(避障)
repulsiveForce = computeRepulsiveForce(positions(i, :), obstacles, obstacleRadius, repulsiveGain);
% 综合控制输入
controlInputs(i, :) = attractiveForce + repulsiveForce;
end
end
4. 改进人工势场法
% 计算吸引力
function force = computeAttractiveForce(position, targetPosition, gain)
distance = targetPosition - position;
force = gain * distance;
end
% 计算排斥力
function force = computeRepulsiveForce(position, obstacles, obstacleRadius, gain)
force = [0, 0, 0];
for i = 1:size(obstacles, 1)
distance = norm(position - obstacles(i, :));
if distance < obstacleRadius
direction = (position - obstacles(i, :)) / distance;
force = force + gain * (1 / distance - 1 / obstacleRadius)^2 * direction;
end
end
end
5. 变换队形
% 变换队形函数
function newFormationShape = transformFormation(formationShape, scale, rotationAngle)
% 缩放
newFormationShape = formationShape * scale;
% 旋转(绕Z轴)
theta = deg2rad(rotationAngle);
rotationMatrix = [cos(theta), -sin(theta), 0;
sin(theta), cos(theta), 0;
0, 0, 1];
newFormationShape = newFormationShape * rotationMatrix;
end
6. 可视化
% 可视化编队、目标点和障碍物
function visualizeFormation(positions, formationShape, leaderPosition, targetPosition, obstacles)
clf;
hold on;
grid on;
% 绘制无人机位置
plot3(positions(:, 1), positions(:, 2), positions(:, 3), 'bo', 'MarkerSize', 10, 'LineWidth', 2);
% 绘制领航者位置
plot3(leaderPosition(1), leaderPosition(2), leaderPosition(3), 'mo', 'MarkerSize', 10, 'LineWidth', 2);
% 绘制目标点
plot3(targetPosition(1), targetPosition(2), targetPosition(3), 'go', 'MarkerSize', 10, 'LineWidth', 2);
% 绘制障碍物
if ~isempty(obstacles)
plot3(obstacles(:, 1), obstacles(:, 2), obstacles(:, 3), 'rx', 'MarkerSize', 10, 'LineWidth', 2);
end
% 绘制编队形状
plot3(positions(:, 1) + formationShape(:, 1), ...
positions(:, 2) + formationShape(:, 2), ...
positions(:, 3) + formationShape(:, 3), 'k--', 'LineWidth', 1);
xlabel('X');
ylabel('Y');
zlabel('Z');
xlim([0, 100]);
ylim([0, 100]);
zlim([0, 50]);
title('Leader-Follower Formation Control with Potential Field');
legend('UAVs', 'Leader', 'Target', 'Obstacles', 'Formation Shape');
drawnow;
end
功能说明
-
领航者控制:
- 领航者根据目标点移动,其他无人机跟随领航者并保持编队形状。
-
改进人工势场法:
- 引入吸引力和排斥力,使无人机既能向目标点移动,又能避开障碍物。
-
动态增加无人机:
- 每隔一定时间动态增加无人机数量,并更新编队形状。
-
变换队形:
- 提供缩放和旋转功能,动态调整编队形状。
-
可视化:
- 实时显示无人机位置、领航者、目标点、障碍物和编队形状。
运行程序
将上述代码保存为一个 .m 文件并运行。你可以根据需要修改参数(如无人机数量、障碍物位置等)来测试不同的场景。
希望这些代码能够帮助你完成基于领航者与人工势场法相结合的编队控制任务!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









