







1. 前言
自动驾驶是一项复杂的技术,其核心包括传感器感知,行为决策,高清地图,海量数据,高性能计算平台等等。目前,基于深度学习的方法在传感器感知方面取得了突破性的进展,并因此推动了自动驾驶技术的飞速发展。自动驾驶技的传感器主要包括摄像机,激光雷达和毫米波雷达。摄像机用于采集可见光图像,对于物体的形状和类别的感知精度较高。由于深度学习技术的成功起源于计算机视觉任务,很多成功的算法也是基于对图像数据的处理,因此基于摄像机的感知技术目前已经相对成熟。图像数据的缺点在于缺少了场景和物体的距离信息,且受天气和环境的影响较大。激光雷达在一定程度上弥补了摄像机的缺点,可以精确的感知物体的距离,但是限制在于成本过高,难以大批量生产。毫米波雷达具有天线波束窄、分辨率高、频带宽、抗干扰能力强等点, 可以比较精确的测量物体的速度和距离,受天气和环境影响较小,而且成本较低,易于大规模生产,因为也成为了目前自动驾驶技术研究的一个热点方向。
传统的雷达感知技术包含大量基于规则的算法。这些规则是研究和工程人员利用先验知识和实际数据总结出来的。人类的先验知识是有限的,可处理的数据也是有限的,因此这些规则并不完备,无法涵盖实际场景中的所有情况,而深度学习技术可以自动的从海量数据中获取知识和规则。随着数据不断累积,知识和规则的学习也就越来越完备,并超越基于人工规则的算法。因此,近些年来,学术界和工业界都都在积极的探索如何将深度学习技术用于提高雷达感知算法的性能。
2. 毫米波雷达信号处理
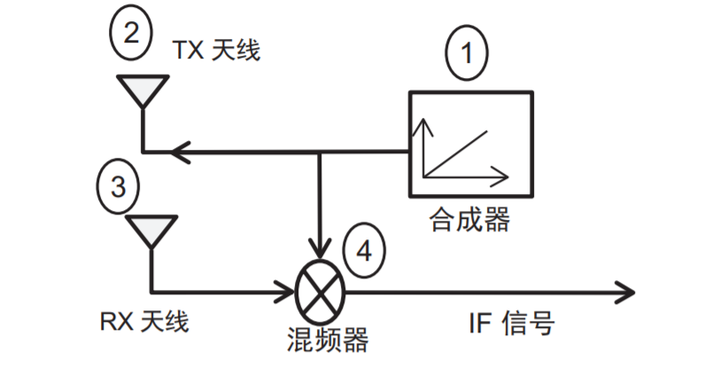
雷达信号与图像信号有很大的差别(与激光雷达部分相似),因此在介绍具体的算法之前,有必要先简单了解一下雷达信号长的什么样子。雷达的种类非常多,比如连续波雷达,脉冲雷达,相控阵雷达,合成孔径雷达(SAR)等等。不同雷达应用的场景也不尽相同,本文只关注自动驾驶应用中常用的毫米波雷达。毫米波雷达发射波长为毫米量级的信号。这种短波长一方面可以使天线的尺寸做的很小,另一方面可以提高检测的准确度,比如工作频率为 76–81GHz(对应波长约为 4mm)的毫米波雷达可以检测零点几毫米的移动。目前常用的是一种称作调频连续波 (FMCW) 的特殊毫米波技术。FMCW 雷达连续发射调频信号,以测量目标的距离,角度和速度。图1是FMCW雷达的结构图。简单来说,其工作原理如下。首先,合成器生成一个线性调频脉冲, 该线性调频脉冲由发射天线(TX 天线)发射。目标物体对该线性调频脉冲的反射生成一个由接收天线(RX 天线)捕捉的反射线性调频脉冲。混频器将 RX 和 TX 信号合并到一起,生成一个中频 (IF) 信号。一般来说,一个雷达包含多个发射和接收天线,因此也就会得到多个IF信号。目标物体的信息,比如距离,速度,角度都包含在这些IF信号中。通过对IF信号进行多次离散傅里叶(DFT)变换,即可将这些信息分离出来。当然,这里只是一个非常简略的概念性的介绍。更详细的理论推导可以参考https://zhuanlan.zhihu.com/p/524371087157
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1814
1814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









